TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024171519
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023088570
出願日
2023-05-30
発明の名称
ワーク把持装置及びロボットシステム
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
15/00 20060101AFI20241205BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】様々なサイズのワークに対応して把持することができるワーク把持装置を提供する。
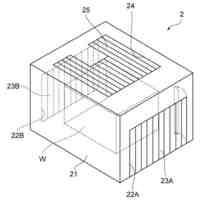
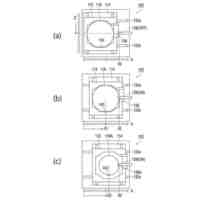
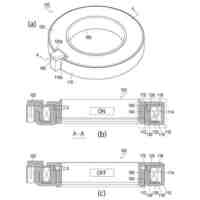
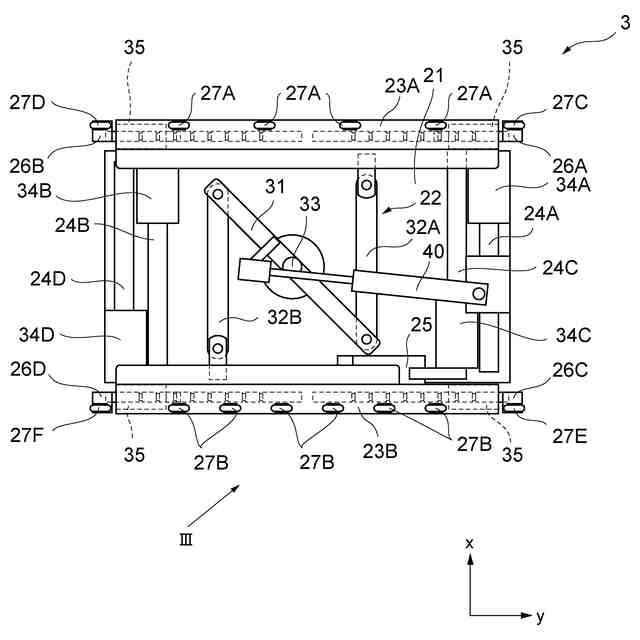
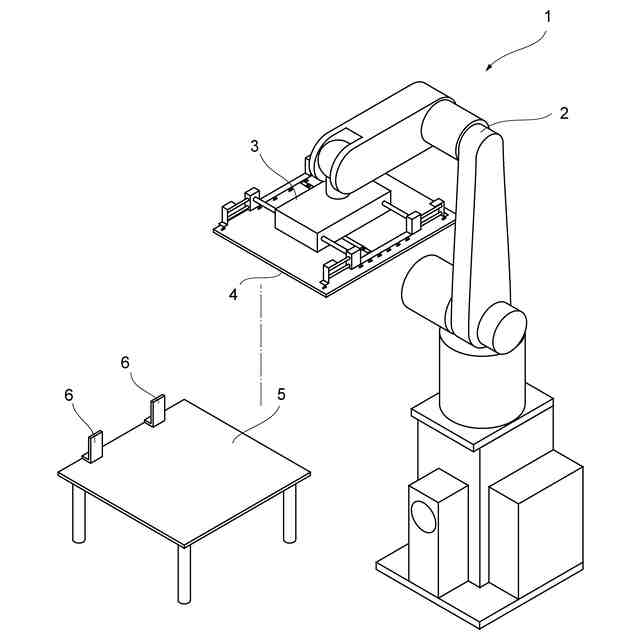
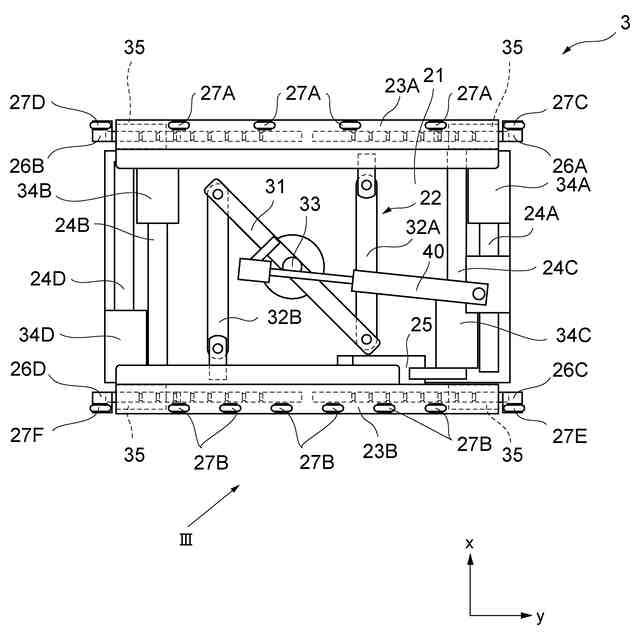
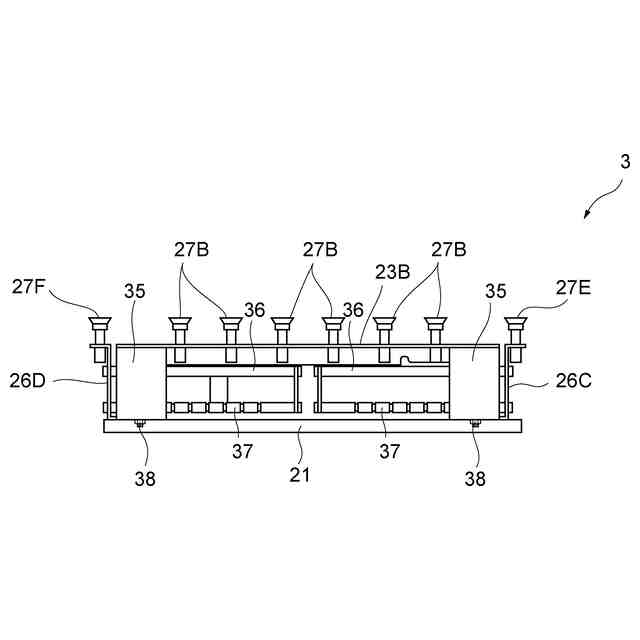
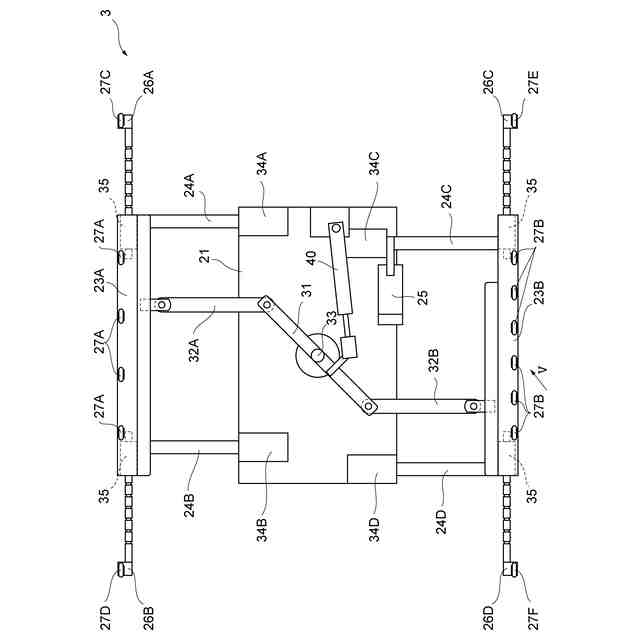
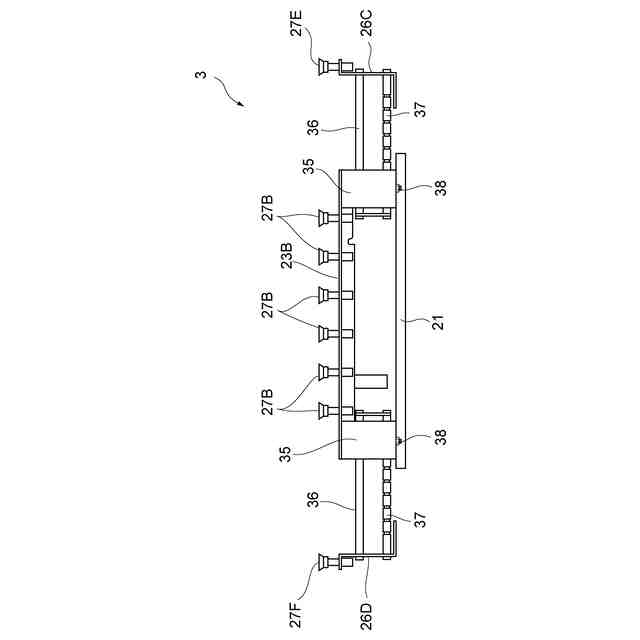
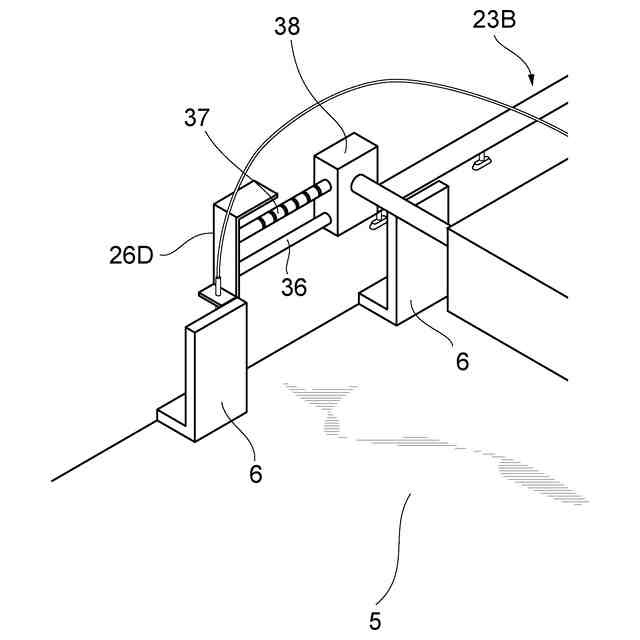
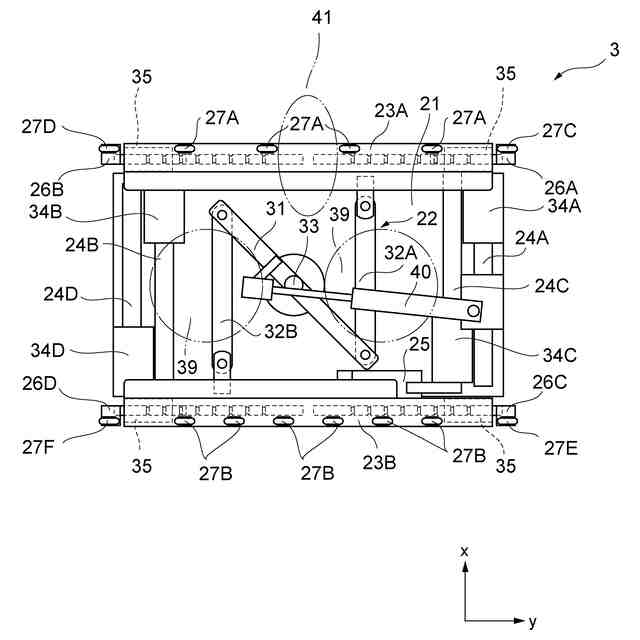
【解決手段】ロボットに取り付けられるハンド3であって、リンク機構22と、リンク機構22に接続され、リンク機構22により第1方向において互いに反対方向に移動するリンク23A~23Bと、リンク23A~23Bに対して第1方向と異なる方向の第2方向に移動するブラケット26A~26Dと、ブラケット26A~26Dに設けられ、ブラケット26A~26Dと共に第2方向に移動し、ワークを把持する吸着パッド27C~27Fとを備える。
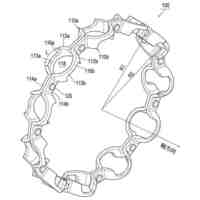
【選択図】図2
特許請求の範囲
【請求項1】
ロボットに取り付けられるワーク把持装置であって、
リンク機構と、
前記リンク機構に接続され、前記リンク機構により第1方向において互いに反対方向に移動する第1移動部材と、
前記第1移動部材に対して前記第1方向と異なる方向の第2方向に移動する第2移動部材と、
前記第2移動部材に設けられ、前記第2移動部材と共に前記第2方向に移動し、ワークを把持する把持部材と、
を備えることを特徴とするワーク把持装置。
続きを表示(約 650 文字)
【請求項2】
前記第2方向は、前記第1方向と略直交する方向であることを特徴とする請求項1に記載のワーク把持装置。
【請求項3】
前記第2移動部材は、前記第2方向における前記第1移動部材の両端にそれぞれ設けられており、前記第1移動部材に対してそれぞれ個別で移動することを特徴とする請求項1又は2に記載のワーク把持装置。
【請求項4】
前記第1移動部材の移動をガイドするスライド部材と、
前記スライド部材をロックするロック部材と、
をさらに備えることを特徴とする請求項1又は2に記載のワーク把持装置。
【請求項5】
前記第1方向における2つの前記第1移動部材の間の位置に設けられ、非接触で前記ワークを把持する非接触把持部材をさらに備えることを特徴とする請求項1又は2に記載のワーク把持装置。
【請求項6】
前記リンク機構に接続され、2つの前記第1移動部材が互いに近づく方向に移動させるシリンダをさらに備えることを特徴とする請求項1又は2に記載のワーク把持装置。
【請求項7】
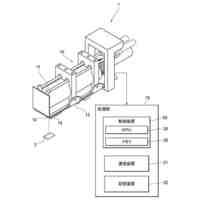
ロボットと、
前記ロボットに取り付けられた請求項1又は2に記載のワーク把持装置と、
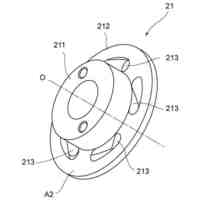
前記ロボットに対して位置が固定され、前記ロボットの動作により前記ワーク把持装置と接触して前記第1移動部材と前記第2移動部材との少なくとも一方の移動を補助する基準部材と、
を備えることを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットに取り付けられるワーク把持装置及びロボットシステムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
例えばワークを搬送するため、ロボットによりワークを把持してワーク搬送を行う手法が周知である。このようなワーク搬送に用いるロボットにおいては、ワークを把持するため、吸着パッドや把持チャック等の把持具が先端に用いられる。
【0003】
ここで、サイズの異なるワークに対応するために、把持具の間の距離であるピッチを可変とする構成が考案されている。例えば特許文献1においては、モータ等の駆動源を使用してピッチ変更することが記載されている。例えば特許文献2においては、自重を利用してピッチ変更することが記載されている。例えば特許文献3においては、ロボットの動作を利用してピッチ変更することが記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2011-25392号公報
特開2005-14185号公報
特開平1-295779号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、上記これらの文献の開示された構成ではピッチを1次元において変化させるものであることから、ワークのサイズによっては適切な位置で把持することができない可能性がある。
【0006】
上記課題に鑑み、本発明は、様々なサイズのワークに対応して把持することができるワーク把持装置及びロボットシステムを提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係るワーク把持装置は、ロボットに取り付けられるワーク把持装置であって、リンク機構と、前記リンク機構に接続され、前記リンク機構により第1方向において互いに反対方向に移動する第1移動部材と、前記第1移動部材に対して前記第1方向と異なる方向の第2軸方向に移動する第2移動部材と、前記第2移動部材に設けられ、前記第2移動部材と共に前記第2方向に移動し、ワークを把持する把持部材と、を備える。
【0008】
また、前記第2方向は、前記第1方向と略直交する方向である。
【0009】
また、前記第2移動部材は、前記第2方向における前記第1移動部材の両端にそれぞれ設けられており、前記第1移動部材に対してそれぞれ個別で移動する。
【0010】
また、前記ワーク把持装置は、前記第1移動部材の移動をガイドするスライド部材と、前記スライド部材をロックするロック部材と、をさらに備える。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
ドリル
1か月前
株式会社不二越
ドリル
14日前
株式会社不二越
ロボット
2か月前
株式会社不二越
ロボット
27日前
株式会社不二越
射出成形機
1か月前
株式会社不二越
射出成形機
今日
株式会社不二越
ソレノイド
2日前
株式会社不二越
射出成形機
1か月前
株式会社不二越
射出成形機
1か月前
株式会社不二越
X線測定装置
15日前
株式会社不二越
搬送システム
17日前
株式会社不二越
金属製保持器
1か月前
株式会社不二越
油圧システム
15日前
株式会社不二越
X線測定装置
15日前
株式会社不二越
駆動伝達機構
14日前
株式会社不二越
金属製保持器
1か月前
株式会社不二越
塵埃噴射装置
9日前
株式会社不二越
二段圧力制御弁
1か月前
株式会社不二越
保持器付き軸受
10日前
株式会社不二越
電磁弁制御装置
1か月前
株式会社不二越
圧力制御システム
27日前
株式会社不二越
超硬合金製ドリル
27日前
株式会社不二越
電食防止軸受構造
1か月前
株式会社不二越
ロボット操作装置
2か月前
株式会社不二越
管用テーパタップ
1か月前
株式会社不二越
スカイビングカッタ
1か月前
株式会社不二越
垂直多関節ロボット
28日前
株式会社不二越
転造加工用平ダイス
1か月前
株式会社不二越
通り穴加工用タップ
1か月前
株式会社不二越
サーフェスブローチ盤
1日前
株式会社不二越
クラッチアクチュエータ
20日前
株式会社不二越
組立式スカイビングカッタ
1か月前
株式会社不二越
異常検知装置及びプログラム
15日前
株式会社不二越
ブレーキ機構及び回転システム
1か月前
株式会社不二越
シール付き軸受および軸受構造
10日前
株式会社不二越
学習処理装置及び学習処理プログラム
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ