TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024167103
公報種別
公開特許公報(A)
公開日
2024-12-02
出願番号
2021162599
出願日
2021-10-01
発明の名称
地切り制御装置、及び、移動式クレーン
出願人
株式会社タダノ
代理人
弁理士法人パテントボックス
主分類
B66C
23/00 20060101AFI20241125BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】荷振れを抑制しつつ、迅速に吊荷を地切りすることのできる地切り制御装置を提供する。
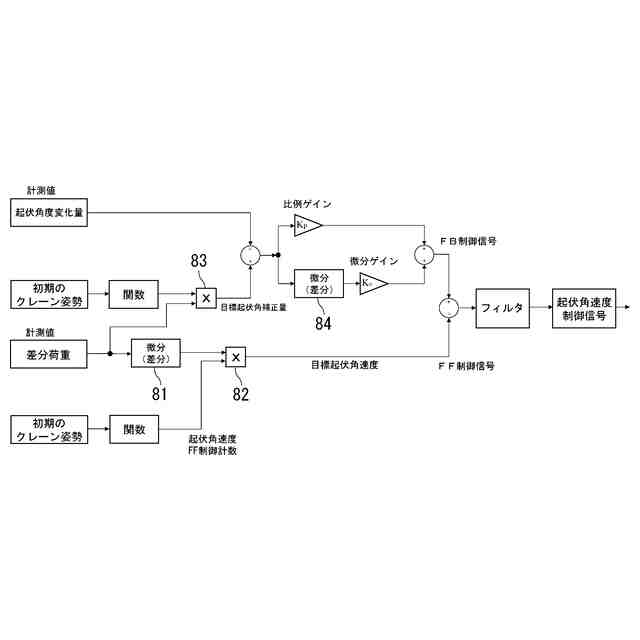
【解決手段】地切り制御装置Dは、ブーム14と;ウインチ13と;荷重計測手段22と;制御部(コントローラ40)であって吊荷を地切りする際に、ブーム14の起伏角速度に基づくフィードフォワード制御、及び、ブーム14の作業姿勢に基づくフィードバック制御、の両方に基づいて制御する、制御部(コントローラ40)と;を備えている。また、起伏角速度に基づくフィードフォワード制御において、起伏角速度は、荷重計測手段22によって計測された荷重の時間変化に基づいて起伏角度の変化量として計算され、該変化量を補うようにブーム14を起仰させるようになっている。
【選択図】図5
特許請求の範囲
【請求項1】
起伏自在に構成されるブームと;
ワイヤを介して吊荷を巻上/巻下げるウインチと;
前記ブームに作用する荷重を計測する荷重計測手段と;
前記ブーム及び前記ウインチを制御する制御部であって、吊荷を地切りする際に、前記ブームの起伏角速度に基づくフィードフォワード制御、及び、前記ブームの姿勢に基づくフィードバック制御、の両方に基づいて制御する、制御部と;
を備える、地切り制御装置。
続きを表示(約 720 文字)
【請求項2】
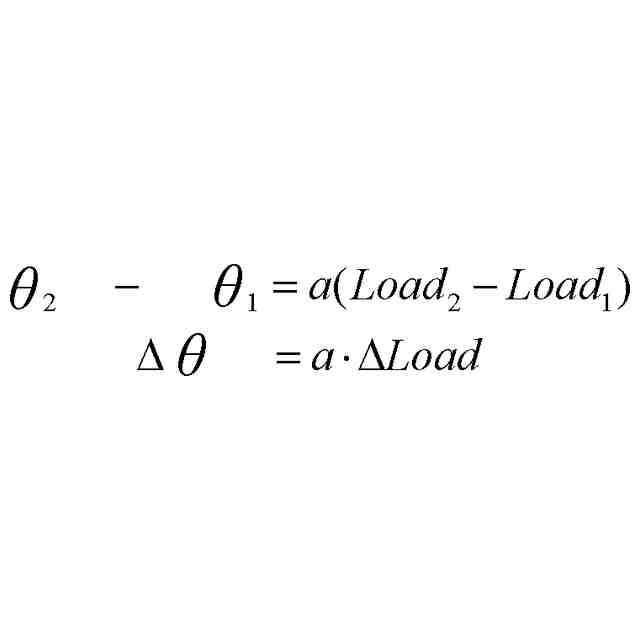
前記起伏角速度の前記フィードフォワード制御において、前記起伏角速度は、前記荷重計測手段によって計測された荷重の時間変化に基づいて起伏角度の変化量として計算され、該変化量を補うように前記ブームを起仰させるようになっている、請求項1に記載された、地切り制御装置。
【請求項3】
前記ブームの姿勢に基づくフィードバック制御は、前記ブームの起伏角に基づくフィードバック制御である、請求項1又は請求項2に記載された、地切り制御装置。
【請求項4】
前記起伏角に基づく前記フィードバック制御において、制御の目標となる目標起伏角は、前記荷重計測手段によって計測された荷重に基づいて計算されるようになっている、請求項3に記載された、地切り制御装置。
【請求項5】
前記ブームの姿勢に基づくフィードバック制御は、前記ブームの作業半径に基づくフィードバック制御である、請求項1又は請求項2に記載された、地切り制御装置。
【請求項6】
前記ブームの作業半径に基づく前記フィードバック制御において、制御の目標となる目標作業半径は、制御開始時の作業半径が記憶されて使用されるようになっている、請求項5に記載された、地切り制御装置。
【請求項7】
前記制御部は、計測された荷重の時系列データを監視し、前記時系列データの最初の極大値を捉えて地切りしたと判定するようにされている、請求項1乃至請求項6のいずれか一項に記載された、地切り制御装置。
【請求項8】
請求項1乃至請求項7のいずれか一項に記載された地切り制御装置を備える、移動式クレーン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、地面から吊荷を吊り上げる際の荷振れを抑制するための地切り制御装置に関するものである。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
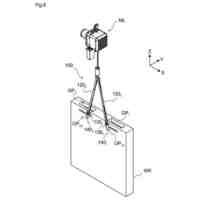
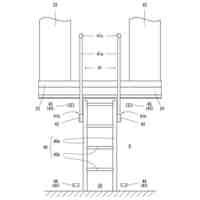
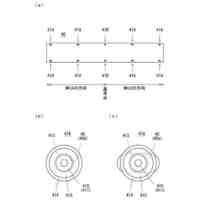
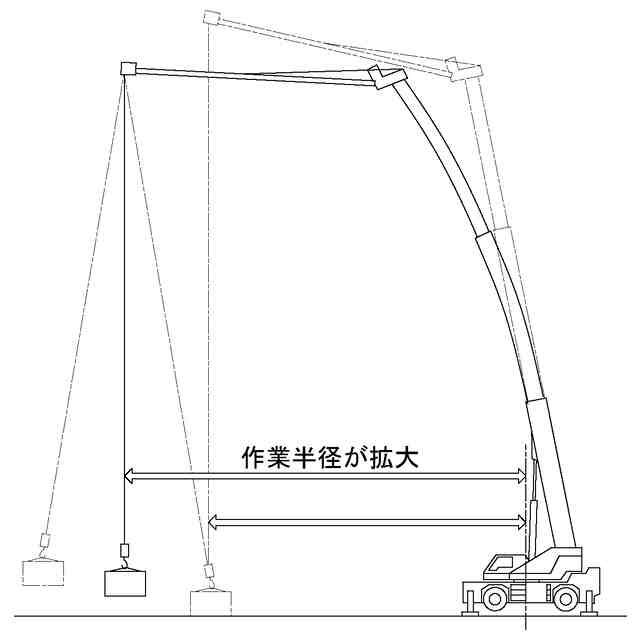
従来から、ブームを備えたクレーンにおいて、地面から吊荷を吊り上げる際に、すなわち吊荷を地切りする際に、ブームに生じるたわみによって作業半径が増大することによって、吊荷が水平方向に振れる「荷振れ」が問題となっている(図1参照)。
【0003】
地切りの際の荷振れを防止することを目的として、例えば、特許文献1に記載された鉛直地切り制御装置は、エンジン回転数センサによってエンジンの回転数を検出し、ブームの起仰作動をエンジン回転数に応じた値に補正するように構成されている。このような構成によって、エンジン回転数の変化を加味した正確な地切り制御を実施できる、とされている。
【先行技術文献】
【特許文献】
【0004】
特開平8-188379号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1を含む従来の地切り制御装置は、ウインチでワイヤが伸びた分だけ巻上げ、起伏を上げることにより作業半径を一定に保つように、2つのアクチュエータを併用して制御していた。そのため、複雑な制御となることで地切りに時間がかかってしまう、という問題があった。
【0006】
そこで、本発明は、荷振れを抑制しつつ、迅速に吊荷を地切りすることのできる地切り制御装置と、地切り制御装置を備えた移動式クレーンと、を提供することを目的としている。
【課題を解決するための手段】
【0007】
前述した目的を達成するために、本発明の地切り制御装置は、起伏自在に構成されるブームと;ワイヤを介して吊荷を巻上/巻下げるウインチと;前記ブームに作用する荷重を計測する荷重計測手段と;前記ブーム及び前記ウインチを制御する制御部であって、吊荷を地切りする際に、前記ブームの起伏角速度に基づくフィードフォワード制御、及び、前記ブームの姿勢に基づくフィードバック制御、の両方に基づいて制御する、制御部と;を備えている。
【発明の効果】
【0008】
このように、本発明の地切り制御装置は、ブームと;ウインチと;荷重計測手段と;吊荷を地切りする際に、ブームの起伏角速度に基づくフィードフォワード制御、及び、ブームの姿勢に基づくフィードバック制御、の両方に基づいて制御する、制御部と;を備えている。このように、FF制御とFB制御とを併用することによって、荷振れを抑制しつつ、迅速に吊荷を地切りすることのできる地切り制御装置となる。特に、FB制御を併用することによって、地切り制御のロバスト性を向上させることができる。
【図面の簡単な説明】
【0009】
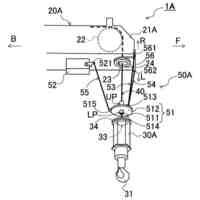
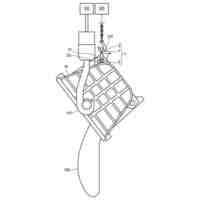
吊荷の荷振れについて説明する説明図である。
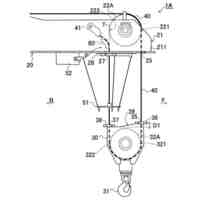
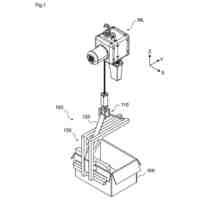
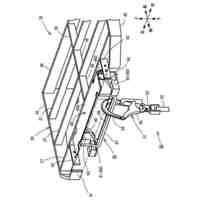
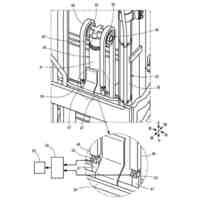
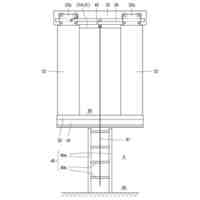
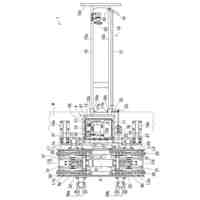
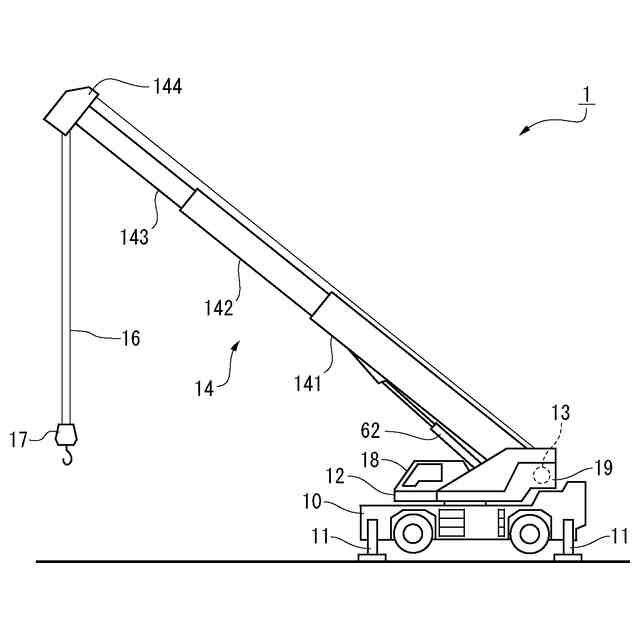
移動式クレーンの側面図である。
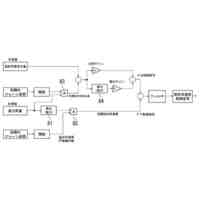
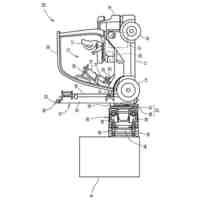
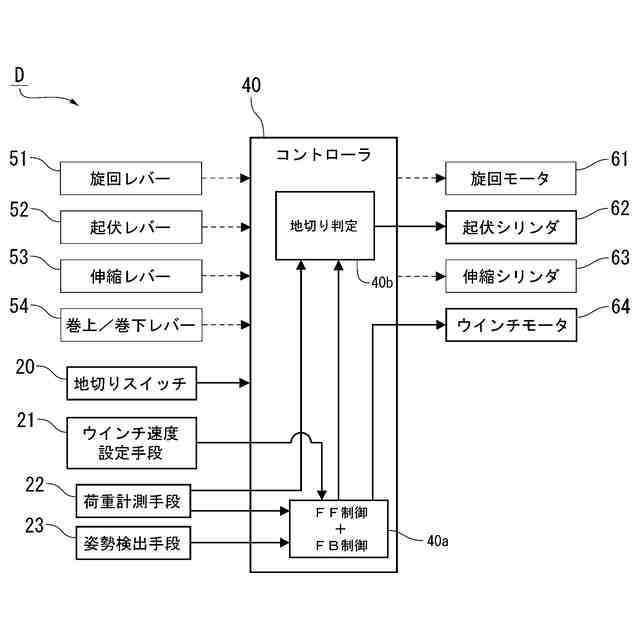
地切り制御装置のブロック図である。
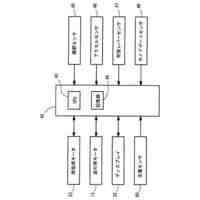
地切り制御装置の全体のブロック線図である。
地切り制御(起伏角に基づくFB制御の場合)のブロック線図である。
地切り制御(作業半径に基づくFB制御の場合)のブロック線図である。
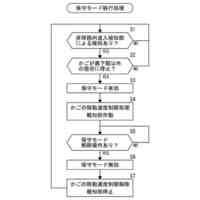
地切り制御のフローチャートである。
地切り判定の手法について説明するグラフである。
荷重-起伏角の関係を示すグラフである。
【発明を実施するための形態】
【0010】
以下、本発明に係る実施例について図面を参照して説明する。ただし、以下の実施例に記載されている構成要素は例示であり、本発明の技術範囲をそれらのみに限定する趣旨のものではない。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
株式会社タダノ
クレーン
4日前
株式会社タダノ
クレーン
4日前
株式会社タダノ
クレーン
4日前
株式会社タダノ
クレーン
4日前
株式会社タダノ
地切り制御装置、及び、移動式クレーン
今日
個人
懸吊装置
2か月前
ユニパルス株式会社
吊具
5か月前
ユニパルス株式会社
吊具
9か月前
ユニパルス株式会社
吊具
9か月前
個人
吊りバケット装置
12か月前
ユニパルス株式会社
吊具装置
5日前
株式会社豊田自動織機
産業車両
12日前
株式会社豊田自動織機
荷役車両
12か月前
株式会社豊田自動織機
荷役車両
4か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
12か月前
株式会社豊田自動織機
荷役車両
7か月前
株式会社豊田自動織機
荷役車両
8か月前
株式会社北川鉄工所
吊荷制御方法
8か月前
株式会社日本キャリア工業
昇降機
3か月前
株式会社ノセ技研
バケット
12か月前
ユニパルス株式会社
荷役助力装置
7か月前
個人
建築部材の吊り上げ装置
1か月前
株式会社豊田自動織機
フォークリフト
4か月前
フジテック株式会社
エレベータ
10か月前
株式会社大林組
養生方法
2か月前
大同特殊鋼株式会社
治具
8か月前
株式会社ニシキ
可変型吊り天秤
6か月前
フジテック株式会社
エレベータ
10か月前
フジテック株式会社
エレベータ
9か月前
ブラザー工業株式会社
架台
5か月前
ウエダ産業株式会社
鋼板保持装置
3か月前
白山工業株式会社
腕重量補償機構
1か月前
フジテック株式会社
乗客搬送装置
9か月前
株式会社キトー
吊具
2か月前
小野谷機工株式会社
ジャッキ装置
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ