TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024166107
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2024074900
出願日
2024-05-02
発明の名称
システム
出願人
国立研究開発法人理化学研究所
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20241121BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】自己保守能力を有するシステムを提供する。
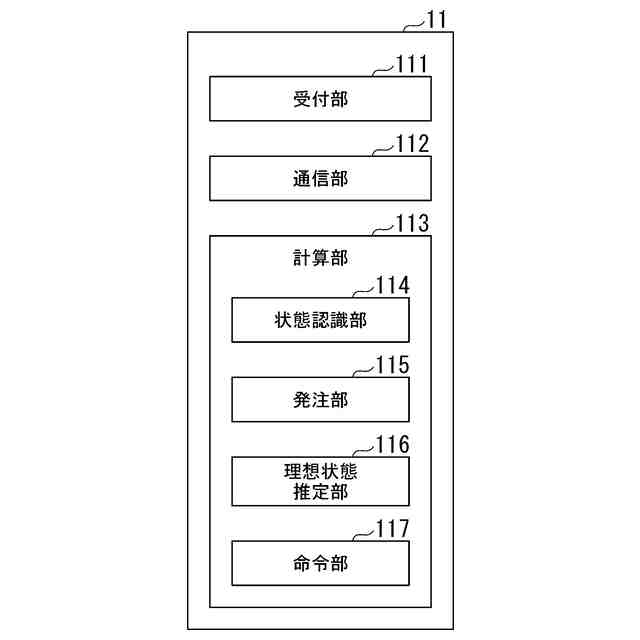
【解決手段】管理サーバと、ロボットと、前記ロボットの行動範囲の空間を含む環境を計測するセンサとを備えるシステムであって、前記管理サーバは、ミッションを受け付ける受付部と、前記ミッションに基づいて命令を生成し、前記ロボットに命令を送信する命令部と、を備え、前記命令は、前記ミッションを実行した後の状態を表す第一命令を含み、前記ロボットは、前記センサの計測データに基づいて、前記ロボットが取り扱う物品の状態を含む前記ロボットの環境状態を特定する状態特定部と、前記命令を受信し、特定した前記状態と前記命令が表す状態との差に基づいて、前記ロボットの状態が前記命令が表す状態に近づくように前記ロボットを駆動する指示部と、を備えるシステム。
【選択図】図1
特許請求の範囲
【請求項1】
管理サーバと、ロボットと、前記ロボットの行動範囲の空間を含む環境を計測するセンサとを備えるシステムであって、
前記管理サーバは、
ミッションを受け付ける受付部と、
前記ミッションに基づいて命令を生成し、前記ロボットに命令を送信する命令部と、
を備え、
前記命令は、前記ミッションを実行した後の状態を表す第一命令を含み、
前記ロボットは、
前記センサの計測データに基づいて、前記ロボットが取り扱う物品の状態を含む前記ロボットの環境状態を特定する状態特定部と、
前記命令を受信し、特定した前記状態と前記命令が表す状態との差に基づいて、前記ロボットの状態が前記命令が表す状態に近づくように前記ロボットを駆動する指示部と、
を備えるシステム。
続きを表示(約 640 文字)
【請求項2】
前記指示部は、前記ロボットの状態と前記第一命令が表す状態との差が所定の要件を満たすように前記ロボットを駆動し、
前記第一命令を受信していない場合、前記ロボットの状態と前記ロボットの理想状態との差が所定の要件を満たすように前記ロボットを駆動する、
請求項1に記載のシステム。
【請求項3】
前記ロボットは、前記管理サーバから前記ロボットの理想状態を表す第二命令を受信する、
請求項2に記載のシステム。
【請求項4】
前記ロボットは、前記ロボットの状態と前記命令が表す状態との差に基づく報酬を用いた強化学習アルゴリズムによって、駆動量を決定する制御量計算部と、
を備える請求項1に記載のシステム。
【請求項5】
前記管理サーバは、前記命令が示す状態に対して、前記ロボットの状態において不足する物品の補充を発注する発注部を備える、
請求項1に記載のシステム。
【請求項6】
前記状態特定部は、前記センサによって計測された前記発注により届いた物品のデータと、前記発注部による発注内容とを照合し、前記物品を管理する、
請求項5に記載のシステム。
【請求項7】
前記管理サーバは、過去に実行した前記ミッションに基づいて、将来発生するミッションが実行可能な状態を前記理想状態として推定する理想状態推定部を備える、
請求項2に記載のシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、システムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
科学実験などの作業を自動化する研究開発が進められている。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2015/242395号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
自動化するシステムは、メンテナンスや維持管理が難しい。
本発明の目的は、上述した課題を解決し、自己保守能力を有するシステムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の一態様は、管理サーバと、ロボットと、前記ロボットの行動範囲の空間を含む環境を計測するセンサとを備えるシステムであって、前記管理サーバは、ミッションを受け付ける受付部と、前記ミッションに基づいて命令を生成し、前記ロボットに命令を送信する命令部と、を備え、前記命令は、前記ミッションを実行した後の状態を表す第一命令を含み、前記ロボットは、前記センサの計測データに基づいて、前記ロボットが取り扱う物品の状態を含む前記ロボットの環境状態を特定する状態特定部と、前記命令を受信し、特定した前記状態と前記命令が表す状態との差に基づいて、前記ロボットの状態が前記命令が表す状態に近づくように前記ロボットを駆動する指示部と、を備えるシステムである。
【発明の効果】
【0006】
本発明によれば、自己保守能力を有するシステムを提供することができる。
【図面の簡単な説明】
【0007】
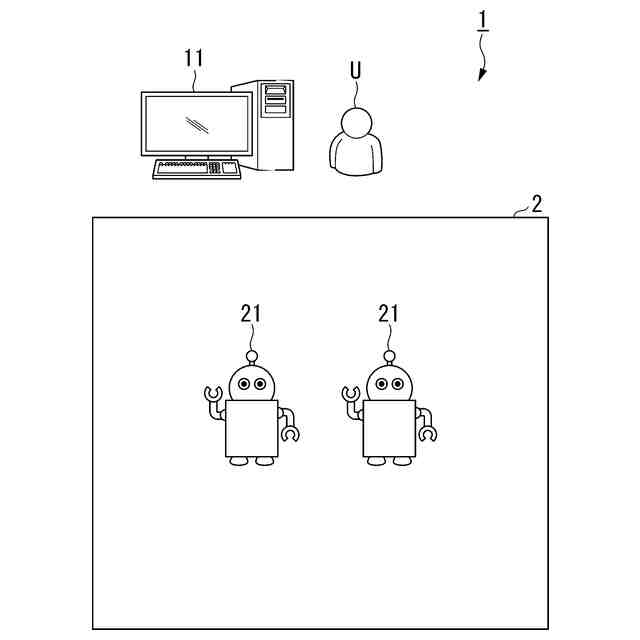
第1の実施形態に係るシステム1の構成を示す図である。
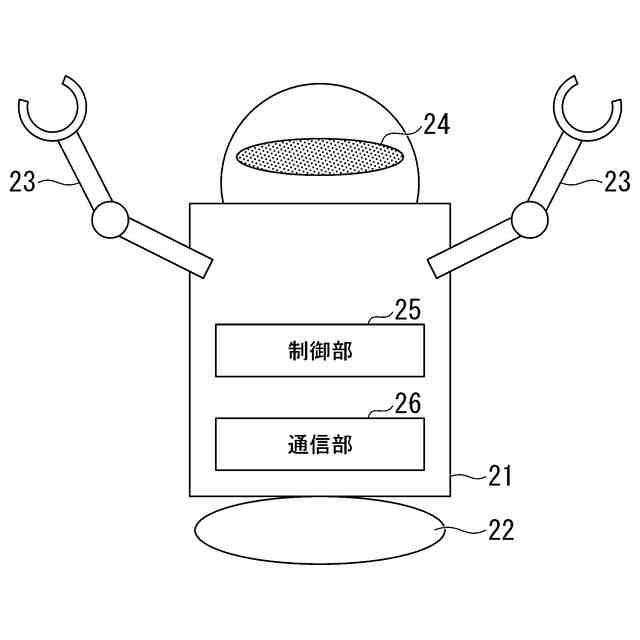
ロボット21の構成を示す図である。
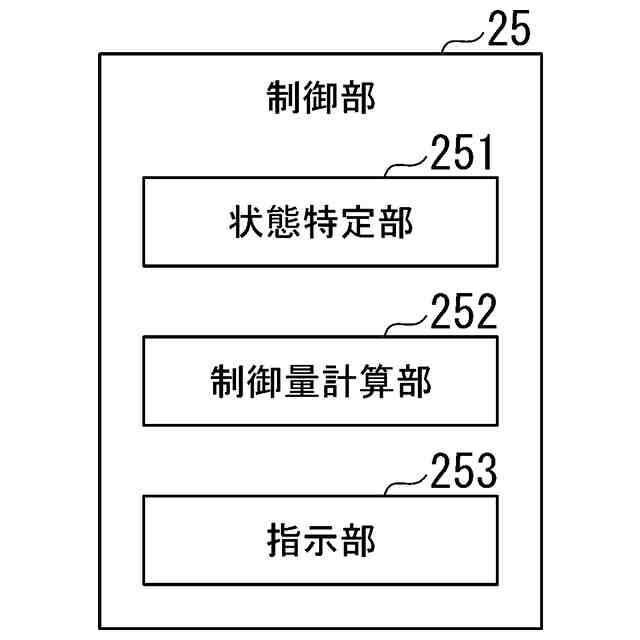
制御部25の構成の一例を示す図である。
管理サーバ11の構成を示す図である。
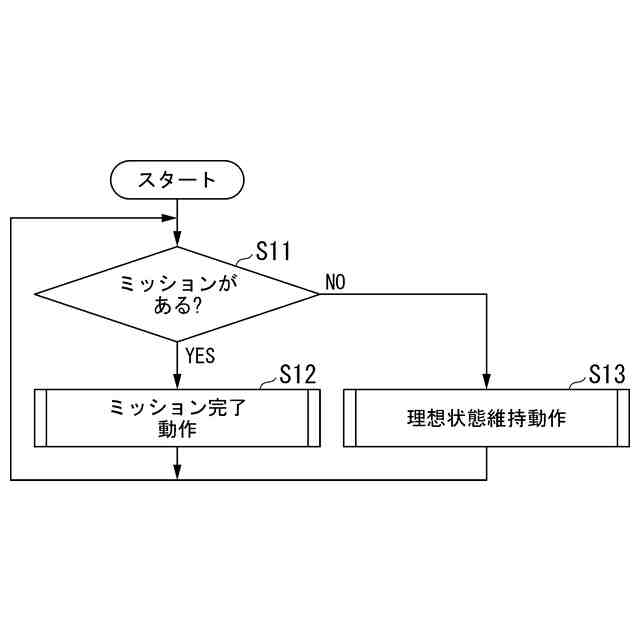
管理サーバ11の動作を示すフローチャートである。
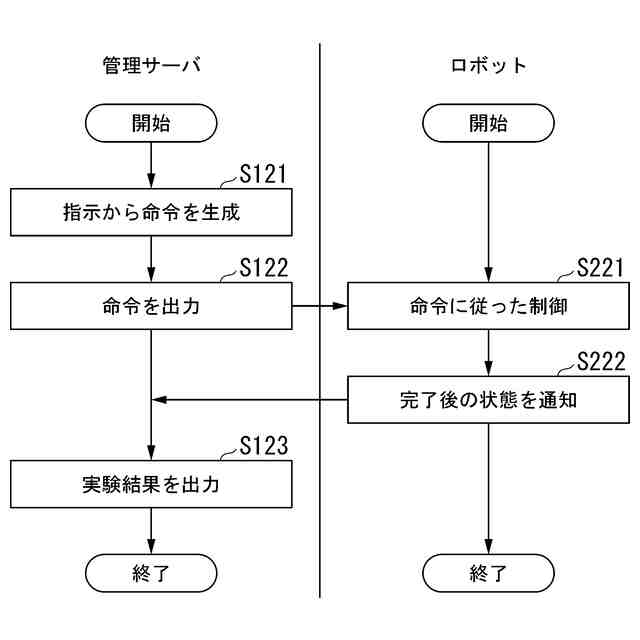
ステップS12における管理サーバ11の動作とそのときのロボット21の動作を示すフローチャートである。
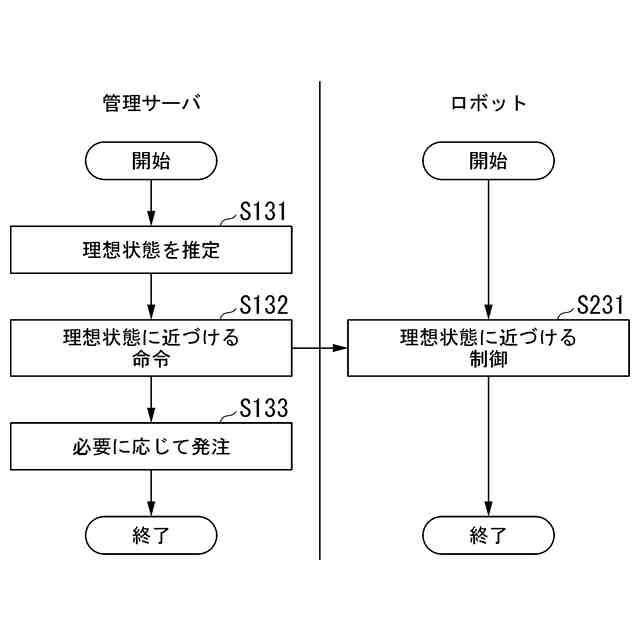
ステップS13における管理サーバ11の動作とそのときのロボット21の動作を示すフローチャートである。
システム1の実現した例を示す図である。
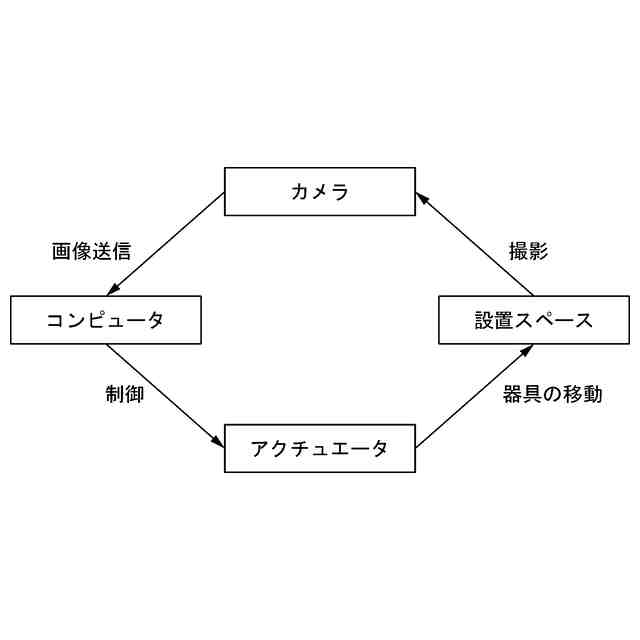
カメラ、コンピュータ、アクチュエータ、設置スペースの関係を示す図である。
【発明を実施するための形態】
【0008】
以下、図面を参照しながら本発明の実施形態について詳しく説明する。
〈第1の実施形態〉
図1は、第1の実施形態に係るシステム1の構成を示す図である。システム1は、管理サーバ11、ロボット21を備える。
管理サーバ11は、利用者Uからミッションを受け付ける。ミッションは例えばロボット21が行う実験内容を含む。管理サーバ11は、ロボット21から、ロボット21の所定の行動範囲2に関するデータを取得する。所定の行動範囲2とは、例えばロボット21が実験作業を行う実験室である。管理サーバ11は、命令を生成し、ロボット21に指示を行う。ロボット21は、所定の行動範囲2において管理サーバ11からの命令にしたがい駆動する。
【0009】
図2は、ロボット21の構成を示す図である。ロボット21は、走行装置22、マニピュレータ23、センサ24、制御部25、通信部26を備える。
走行装置22は、ロボット21の下部に設けられ、ロボット21全体を支える。走行装置22は、例えば無限軌道であって、回転することでロボット21を行動範囲2内で移動させる。
マニピュレータ23は、行動範囲2内の備品を把持する。マニピュレータ23は、例えば各関節にサーボモータが設けられ、関節角度が制御される。マニピュレータ23は、関節角度や把持しているか否かに関する情報を制御部25にフィードバックする。マニピュレータ23は、把持する部分にセンサを備え、物体を把持しているか否かを判定しフィードバックしてもよい。
【0010】
センサ24は、ロボット21の周囲をセンシングし、センシングデータを取得する。センサ24は、例えばカメラであって、ロボット21の少なくとも前方の画像を撮像する。センシングデータはカメラにより撮像される画像を含む。センサ24は、例えばLiDARであって、三次元空間を計測する。センシングデータはLiDARにより計測される三次元空間のデータを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
6か月前
株式会社ツノダ
挟持工具
8か月前
コクヨ株式会社
補助器具
2か月前
太陽工業株式会社
チャック装置
2か月前
株式会社ツノダ
挟持工具
9か月前
川崎重工業株式会社
ハンド
9か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
株式会社右川ゴム製造所
把持装置
8か月前
日東工器株式会社
衝撃工具
5か月前
川崎重工業株式会社
ロボット
6日前
個人
メンテナンス用スタンド
4か月前
CKD株式会社
把持装置
3か月前
オムロン株式会社
電動把持工具
2か月前
学校法人立命館
グリッパ
3か月前
学校法人立命館
グリッパ
8か月前
株式会社マキタ
打撃工具
26日前
トヨタ自動車株式会社
ロボット
4か月前
学校法人立命館
ロボットハンド
9か月前
川崎重工業株式会社
罫書用治具
5か月前
東京計器株式会社
接触検知装置
4か月前
株式会社マキタ
動力工具
6か月前
個人
回転工具およびバリ取り部品
4か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
26日前
株式会社ダイヘン
搬送装置
6か月前
株式会社マキタ
電動ハンマ
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































