TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024165878
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023082444
出願日
2023-05-18
発明の名称
ドローン
出願人
株式会社ディスコ
代理人
弁理士法人酒井国際特許事務所
主分類
B64U
20/30 20230101AFI20241121BHJP(航空機;飛行;宇宙工学)
要約
【課題】ドローンの一部が故障しても飛行の継続や着陸などを含む飛行の制御ができるドローンを提供する事。
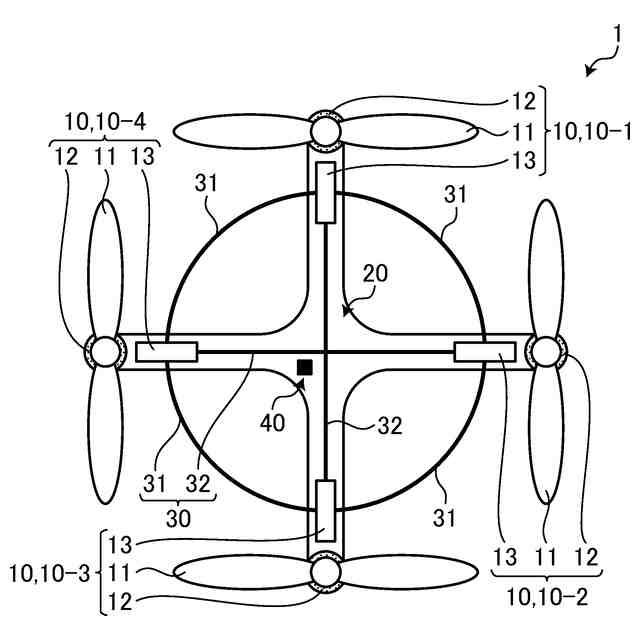
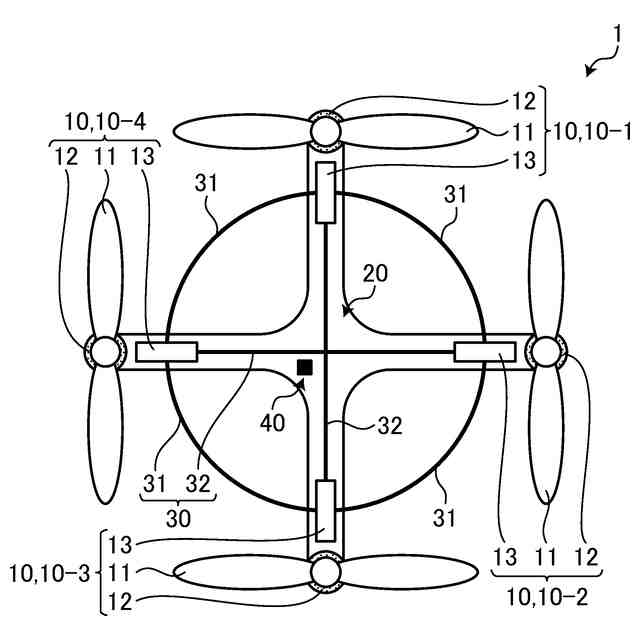
【解決手段】ドローン1は、プロペラ11と、プロペラ11を回転させるモーター12と、モーター12を制御するCPU13と、から構成されるプロペラユニット10と、複数のプロペラユニット10を連結するフレーム20と、プロペラユニット10のCPU13と、他のプロペラユニット10のCPU13と、をそれぞれ通信可能に接続する複数の通信ケーブル30と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
プロペラと、該プロペラを回転させるモーターと、該モーターを制御するCPUと、から構成されるプロペラユニットと、
複数の該プロペラユニットを連結するフレームと、
該プロペラユニットの該CPUと、他の該プロペラユニットの該CPUと、をそれぞれ通信可能に接続する複数の通信ケーブルと、
を備えるドローン。
続きを表示(約 500 文字)
【請求項2】
該プロペラユニットは、該モーターと、該CPUと、に電力を供給するバッテリーをさらに含んで構成され、
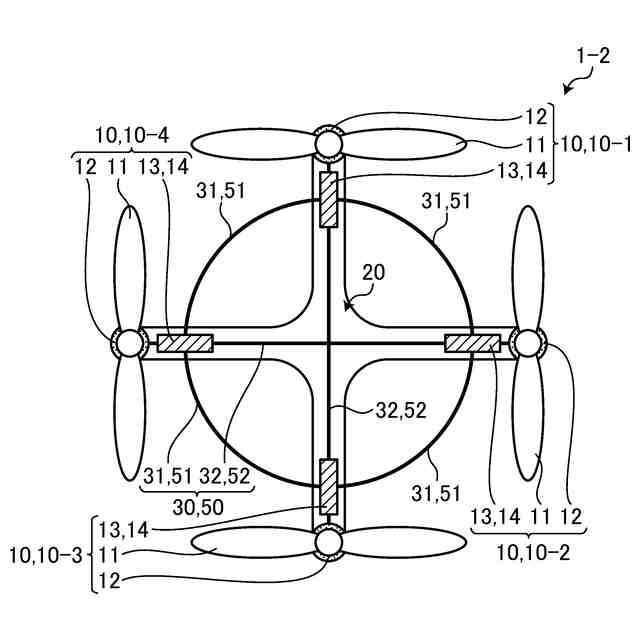
該バッテリーは、他の該プロペラユニットの該バッテリーと、電力供給ケーブルによってそれぞれ接続される請求項1に記載のドローン。
【請求項3】
該通信ケーブルは、
それぞれの該CPUを環状に接続する環状通信ケーブルと、
それぞれの該CPUを対角線状に接続する対角線通信ケーブルと、
で構成される請求項1に記載のドローン。
【請求項4】
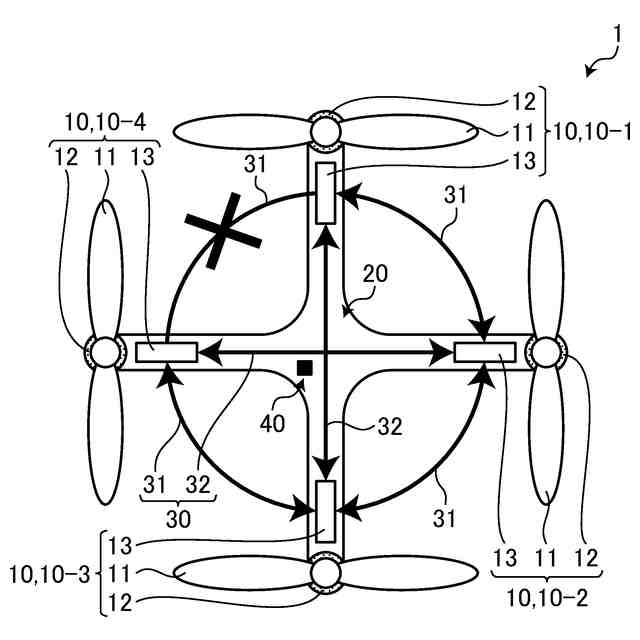
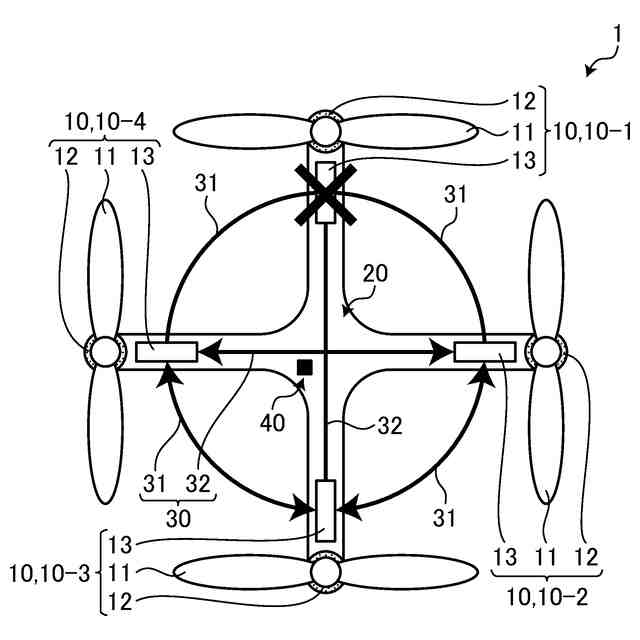
一部の該通信ケーブルが断線した場合、残りの通信ケーブルを経由して、それぞれの該CPUが通信可能である請求項1に記載のドローン。
【請求項5】
一部の該プロペラユニットの該CPUが故障した場合、残りの該プロペラユニットのみで該ドローンを制御する請求項1に記載のドローン。
【請求項6】
電圧が低下した該バッテリーは、他の該プロペラユニットの該バッテリーから該電力供給ケーブルを通して、電力の供給を受ける事を特徴とする請求項2に記載のドローン。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ドローンに関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
中央部にCPU、バッテリー、カメラなどの機体が配置され、中央部を囲う外周部に複数のプロペラとプロペラを回転させるモーターとが配置されており、一つのCPUが各プロペラユニットを制御する事で飛行するドローンが知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2021-179718号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、このようなドローンにおいて、CPUの故障、通信ケーブルの断線、バッテリーの電圧の低下など、通信や電力の供給経路に一部でも故障が発生すると、制御ができなくなるプロペラユニットが発生し、飛行が困難になるという問題があった。
【0005】
本発明は、かかる問題点に鑑みてなされたものであり、その目的は、ドローンの一部が故障しても飛行の継続や着陸などを含む飛行の制御ができるドローンを提供する事である。
【課題を解決するための手段】
【0006】
上述した課題を解決し、目的を達成するために、本発明のドローンは、プロペラと、該プロペラを回転させるモーターと、該モーターを制御するCPUと、から構成されるプロペラユニットと、複数の該プロペラユニットを連結するフレームと、該プロペラユニットの該CPUと、他の該プロペラユニットの該CPUと、をそれぞれ通信可能に接続する複数の通信ケーブルと、を備えるものである。
【0007】
該プロペラユニットは、該モーターと、該CPUと、に電力を供給するバッテリーをさらに含んで構成され、該バッテリーは、他の該プロペラユニットの該バッテリーと、電力供給ケーブルによってそれぞれ接続されてもよい。
【0008】
該通信ケーブルは、それぞれの該CPUを環状に接続する環状通信ケーブルと、それぞれの該CPUを対角線状に接続する対角線通信ケーブルと、で構成されてもよい。
【0009】
一部の該通信ケーブルが断線した場合、残りの通信ケーブルを経由して、それぞれの該CPUが通信可能であってもよい。
【0010】
一部の該プロペラユニットの該CPUが故障した場合、残りの該プロペラユニットのみで該ドローンを制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ディスコ
被覆装置
16日前
株式会社ディスコ
加工装置
18日前
株式会社ディスコ
切削装置
1日前
株式会社ディスコ
切削装置
16日前
株式会社ディスコ
加工装置
16日前
株式会社ディスコ
切削装置
1日前
株式会社ディスコ
貼着方法
16日前
株式会社ディスコ
洗浄装置
2日前
株式会社ディスコ
加工方法
5日前
株式会社ディスコ
研削装置
17日前
株式会社ディスコ
洗浄ノズル
24日前
株式会社ディスコ
処理システム
23日前
株式会社ディスコ
湾曲矯正方法
18日前
株式会社ディスコ
研削ホイール
29日前
株式会社ディスコ
搬送システム
29日前
株式会社ディスコ
板状物の加工方法
16日前
株式会社ディスコ
保護部材の形成方法
1日前
株式会社ディスコ
洗浄機及び洗浄方法
18日前
株式会社ディスコ
被加工物の加工方法
19日前
株式会社ディスコ
被加工物の加工方法
16日前
株式会社ディスコ
保護シート貼着方法
19日前
株式会社ディスコ
保護シート貼着方法
19日前
株式会社ディスコ
ウエーハの分割方法
1日前
株式会社ディスコ
ウエーハの加工方法
1日前
株式会社ディスコ
被加工物の加工方法
17日前
株式会社ディスコ
試験装置及び試験方法
18日前
株式会社ディスコ
研磨装置及び研磨方法
16日前
株式会社ディスコ
加工方法、及び、切削装置
17日前
株式会社ディスコ
調整方法、及び、研削装置
5日前
株式会社ディスコ
加工装置、及び、加工方法
5日前
株式会社ディスコ
ウェーハの分割方法及び分割装置
11日前
株式会社ディスコ
システム、制御方法、及び、プログラム
1日前
株式会社ディスコ
セラミックスコンデンサー基板の加工方法
17日前
株式会社ディスコ
フランジ機構、切削装置及び切削ブレード
16日前
株式会社ディスコ
セラミックスコンデンサー基板の加工方法
9日前
株式会社ディスコ
ウエーハの加工方法及びチップの製造方法
24日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ