TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165619
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081966
出願日
2023-05-18
発明の名称
ピッキングシステムおよびピッキングロボットの制御方法
出願人
株式会社日立製作所
代理人
弁理士法人信友国際特許事務所
主分類
B25J
13/08 20060101AFI20241121BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業者が物品ごとに使用するユニットを規定することなく、ピッキング作業を迅速に行うことができるようにする。
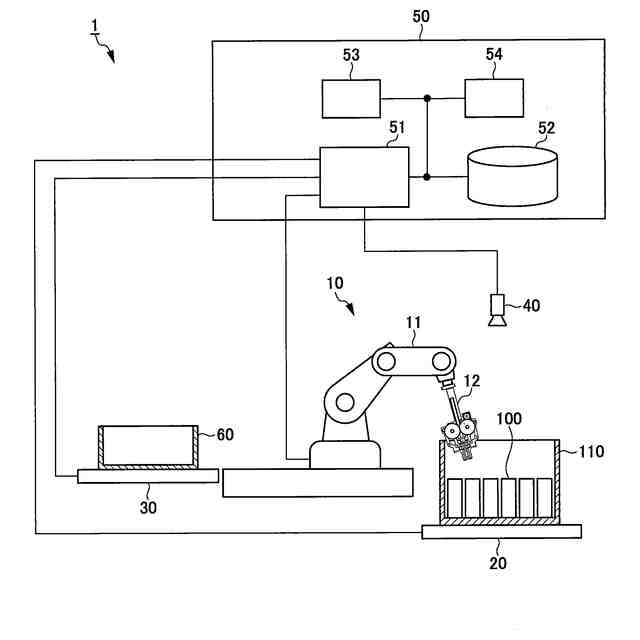
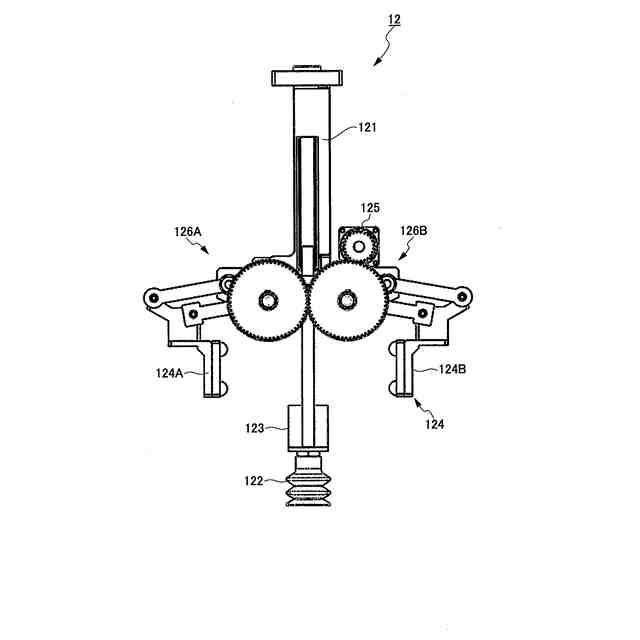
【解決手段】本発明のピッキングシステムは、物品を吸着する吸着部122および物品を把持する把持部124を有するロボットハンド12を備えたピッキングロボット10と、ピッキングロボット10によるピッキング作業の制御を行う制御部50とを備える。制御部50は、ピッキング対象の物品に関する物品情報に応じて、ロボットハンド12によるピッキング手法を切り替える。
【選択図】図1
特許請求の範囲
【請求項1】
物品を吸着する吸着部および物品を把持する把持部を有するロボットハンドを備えたピッキングロボットと、
前記ピッキングロボットによるピッキング作業の制御を行う制御部と
を備え、
前記制御部は、ピッキング対象の物品に関する物品情報に応じて、前記ロボットハンドによるピッキング手法を切り替える
ピッキングシステム。
続きを表示(約 910 文字)
【請求項2】
前記制御部は、前記物品情報に応じて、前記吸着部による吸着、前記把持部による把持、前記吸着部および前記把持部の両方による吸着・把持のいずれかの手法を、前記ピッキング手法として設定する
請求項1に記載のピッキングシステム。
【請求項3】
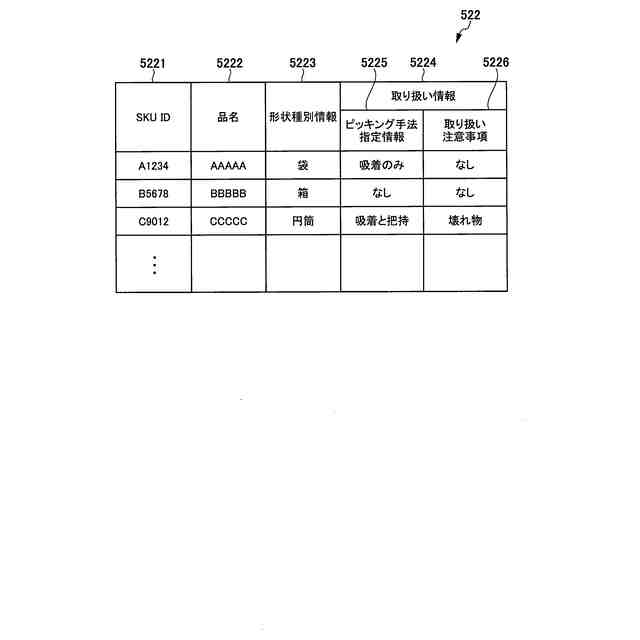
前記物品情報は、物品の種別を規定する形状種別情報、および、物品を搬送する際の取り扱いに関する取り扱い情報を含む
請求項2に記載のピッキングシステム。
【請求項4】
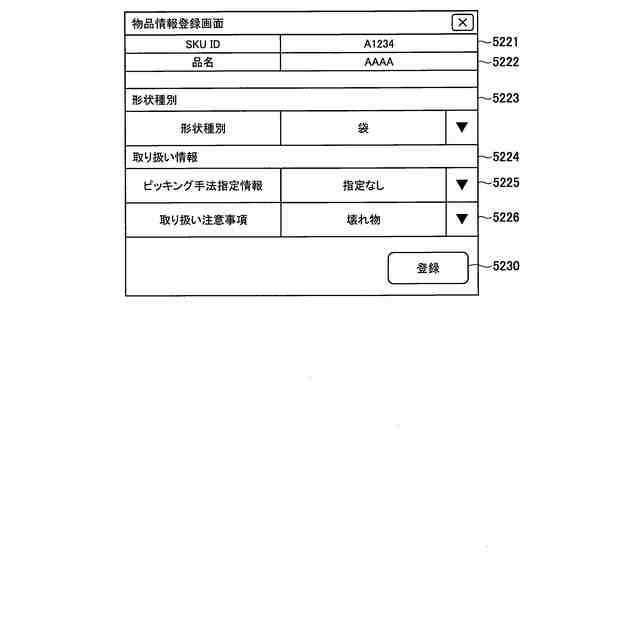
前記物品情報は、物品の種類ごとに、物品の特性を表す取り扱い情報、形状種別情報、および、ピッキング手法指定情報を含む
請求項3に記載のピッキングシステム。
【請求項5】
ピッキング対象の物品を撮影する撮影装置をさらに備え、
前記制御部は、前記撮像装置の撮影結果から、物品の形状、位置、姿勢、および、重心に基づく把持点候補を取得し、前記把持点候補の付近の形状に応じて前記ピッキング手法を選択する
請求項3に記載のピッキングシステム。
【請求項6】
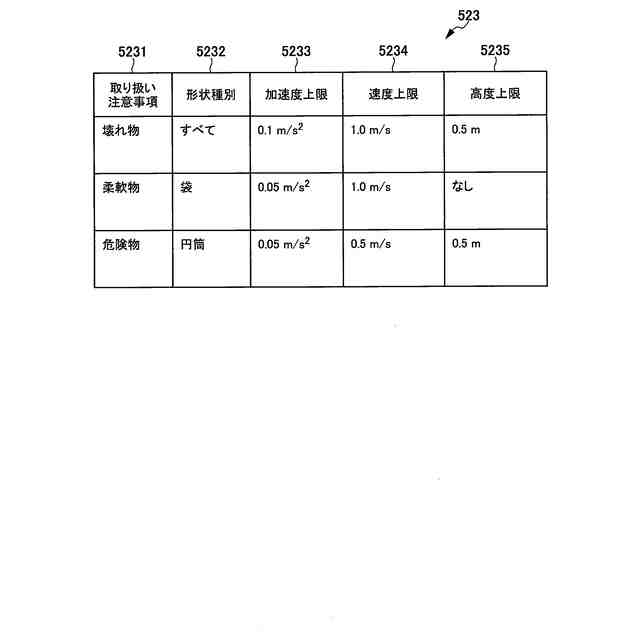
物品の形状種別ごとの処理定義データを有し、
前記制御部は、前記処理定義データ、前記物品情報、および、前記撮像装置の撮影結果から抽出した物品形状に基づいて、前記ピッキング手法を選択する
請求項5に記載のピッキングシステム。
【請求項7】
ピッキング対象の物品を撮影する撮影装置をさらに備え、
物品の基本形状を含む形状種別ごとの認識処理情報を有し、
前記制御部は、前記物品の基本形状と前記撮影装置で撮影した形状とをマッチングさせて、ピッキングの際の把持点を特定する
請求項3に記載のピッキングシステム。
【請求項8】
物品を吸着する吸着部および物品を把持する把持部を有するロボットハンドを備えたピッキングロボットの制御方法であって、
ピッキング対象の物品に関する物品情報に応じて、前記ロボットハンドによるピッキング手法を切り替える
ピッキングロボットの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ピッキングシステムおよびピッキングロボットの制御方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
物流倉庫においては、物品を注文に応じて配送先ごとに仕分ける作業が必要になる。この作業を自動化するために、所謂、ピッキングロボットが実用化されている。ピッキングロボットは、物品を出荷するためのピッキング作業を自動化してくれるロボットである。ピッキングロボットには、出荷対象の物品を保持するロボットハンドが取り付けられている。
【0003】
ピッキングロボットの中には、倉庫で取り扱われる様々な形状の物品をピッキングできるようにするために、複数の保持ユニットを有するロボットハンドを備えたピッキングロボットがある(例えば、特許文献1参照)。この種のピッキングロボットは、複数の保持ユニットを使い分けることにより、多様な形状の物品のピッキングに対応することができる。
【0004】
特許文献1には、「挟持ユニットおよび吸着ユニットを有し、挟持ユニットおよび吸着ユニットを回動させることにより、挟持ユニットおよび吸着ユニットのいずれのユニットを保持対象物の保持に使用するかを切り替える」技術が開示されている。
【先行技術文献】
【特許文献】
【0005】
特開2023-015567号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
上記の従来技術では、挟持ユニットおよび吸着ユニットの回動により、いずれのユニットを保持対象物の保持に使用するかを切り替えることができる。しかしながら、当該従来技術の場合、一般的には、いずれのユニットを使用するかを物品ごとに作業者が規定する必要がある。そのため、数万種類の物品を扱うこともある物流倉庫では、作業者が物品ごとに使用するユニットを規定するとした場合、その作業が多大になる課題がある。
【0007】
本発明は、このような状況に鑑みてなされたものであり、作業者が物品ごとに使用するユニットを規定することなく、ピッキング作業を迅速に行うことができるピッキングシステムおよびピッキングロボットの制御方法を提供することを目的とする。
【課題を解決するための手段】
【0008】
上記課題を解決するための本発明のピッキングシステムは、物品を吸着する吸着部および物品を把持する把持部を有するロボットハンドを備えたピッキングロボットと、ピッキングロボットによるピッキング作業の制御を行う制御部とを備え、制御部は、ピッキング対象の物品に関する物品情報に応じて、ロボットハンドによるピッキング手法を切り替える。
【0009】
また、上記課題を解決するための本発明のピッキングロボットの制御方法は、物品を吸着する吸着部および物品を把持する把持部を有するロボットハンドを備えたピッキングロボットの制御方法であって、ピッキング対象の物品に関する物品情報に応じて、ロボットハンドによるピッキング手法を切り替える。
【発明の効果】
【0010】
本発明によれば、作業者が物品ごとに使用するユニットを規定する必要がなく、ピッキング作業を迅速に行うことができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
3か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
川崎重工業株式会社
ロボット
7日前
CKD株式会社
把持装置
3か月前
川崎重工業株式会社
罫書用治具
5か月前
オムロン株式会社
電動把持工具
2か月前
学校法人立命館
グリッパ
3か月前
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
打撃工具
27日前
東京計器株式会社
接触検知装置
4か月前
株式会社ダイヘン
搬送装置
27日前
株式会社エビス
携帯付属物取付具
27日前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社マキタ
電動ハンマ
1か月前
株式会社ダイヘン
制御装置
1か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
個人
回転工具およびバリ取り部品
4か月前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
2か月前
白山工業株式会社
ロボットアーム
3か月前
トヨタ自動車株式会社
締付判定方法
3か月前
川崎重工業株式会社
ロボット
3か月前
株式会社スター精機
把持装置
2か月前
株式会社大林組
ロッカー装置
4か月前
SMC株式会社
グリッパ
1か月前
国立大学法人佐賀大学
協働システム
3か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ