TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024163448
公報種別
公開特許公報(A)
公開日
2024-11-22
出願番号
2023079048
出願日
2023-05-12
発明の名称
推進器制御装置、およびプログラム
出願人
ナブテスコ株式会社
代理人
個人
,
個人
,
個人
,
個人
主分類
B63H
21/21 20060101AFI20241115BHJP(船舶またはその他の水上浮揚構造物;関連艤装品)
要約
【課題】目標船速への追従性を安定させること。
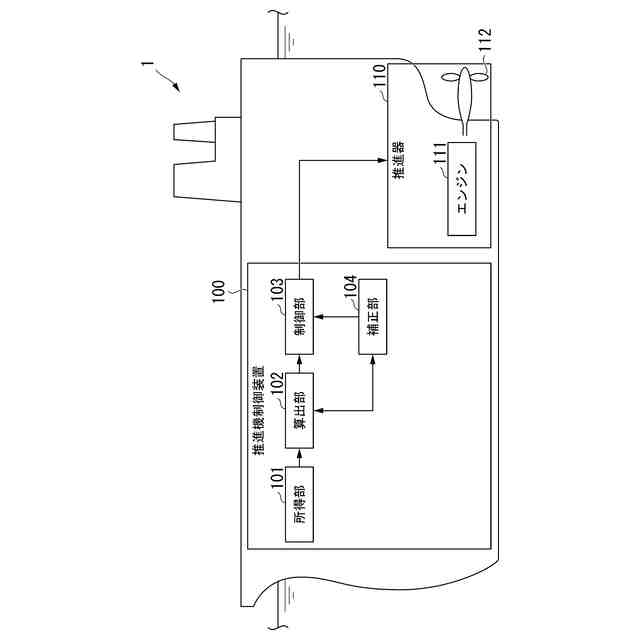
【解決手段】推進器制御装置は、算出部と、制御部と、補正部とを備える。算出部は、推進器を備える船舶の対地船速を目標船速に追従させる船速フィードバック制御により前記推進器の目標推進力を算出する。制御部は、算出された前記目標推進力に従って、前記推進器を制御する。補正部は、前記対地船速に対する前記目標船速の大小関係と、前記対地船速に対する前記船舶の対水船速の大小関係と、が一致するという特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記船速フィードバック制御の応答性が大きくなるように前記目標推進力を補正する。
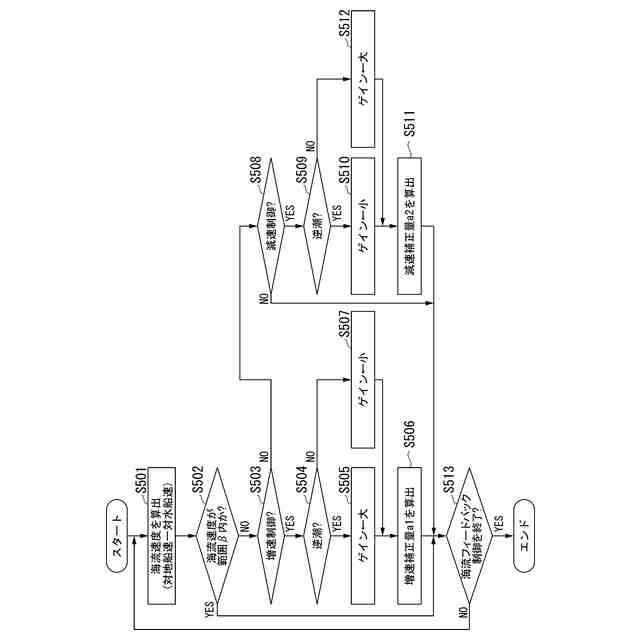
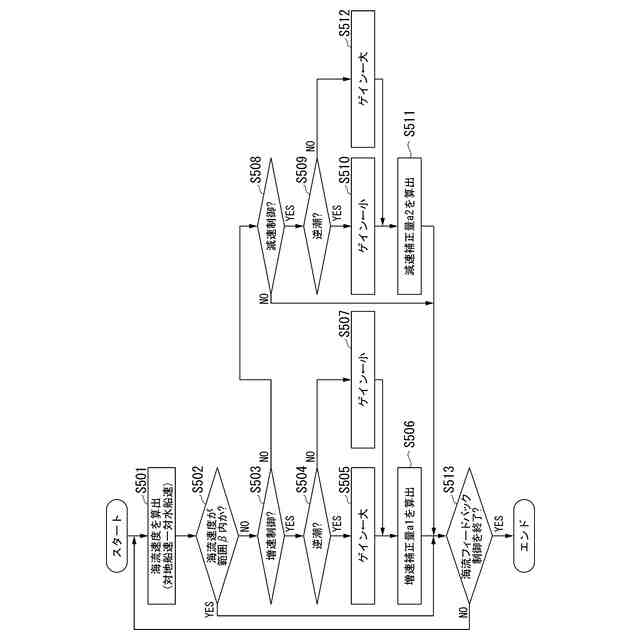
【選択図】図5
特許請求の範囲
【請求項1】
推進器を備える船舶の対地船速を目標船速に追従させる船速フィードバック制御により前記推進器の目標推進力を算出する算出部と、
算出された前記目標推進力に従って、前記推進器を制御する制御部と、
前記対地船速に対する前記目標船速の大小関係と、前記対地船速に対する前記船舶の対水船速の大小関係と、が一致するという特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記船速フィードバック制御の応答性が大きくなるように前記目標推進力を補正する補正部と、
を備える推進器制御装置。
続きを表示(約 970 文字)
【請求項2】
前記算出部は、前記対地船速と前記対水船速の差分から補正量を算出し、
前記補正部は、前記船速フィードバック制御により算出した前記目標推進力に前記補正量を加えることで、前記船速フィードバック制御の応答性を補正し、
前記補正量は、前記特定条件が満たされない場合よりも前記特定条件が満たされる場合の方が大きい、
請求項1に記載の推進器制御装置。
【請求項3】
前記補正部は、前記船速フィードバック制御におけるゲインを、前記特定条件が満たされない場合よりも前記特定条件が満たされる場合の方が大きくなるように補正する、
請求項1または2に記載の推進器制御装置。
【請求項4】
前記補正部は、前記特定条件が満たされる場合、前記対地船速と前記対水船速との差分が大きくなるほど前記応答性が大きくなるように補正し、前記差分が小さくなるほど前記応答性が小さくなるように補正する、
請求項1または2に記載の推進器制御装置。
【請求項5】
前記推進器は、可変ピッチプロペラおよび主機を含み、
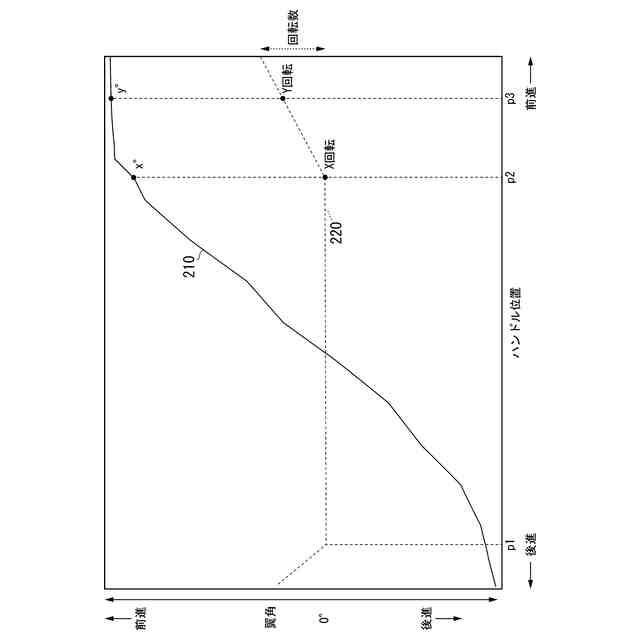
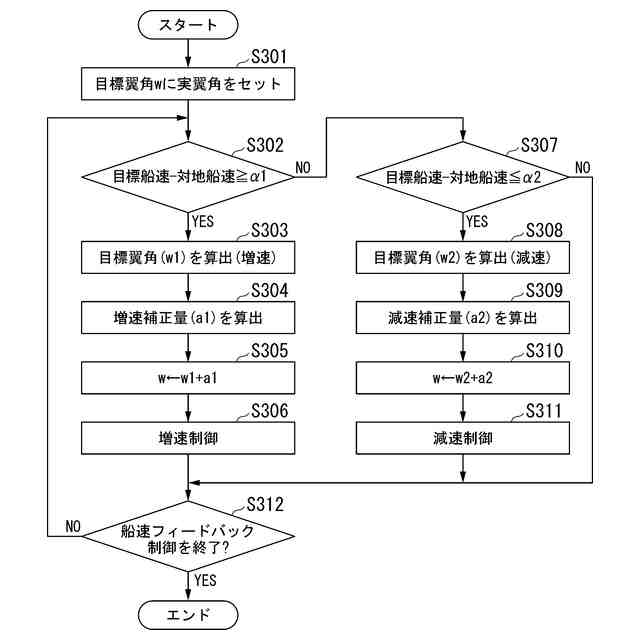
前記船速フィードバック制御では、前記対地船速と前記対水船速との差分に基づいて、前記目標推進力である前記可変ピッチプロペラの目標翼角と前記主機の目標回転数とがそれぞれ算出され、
前記補正部は、前記特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記応答性が大きくなるように前記目標翼角を補正し、前記目標回転数を補正しない、
請求項1または2に記載の推進器制御装置。
【請求項6】
推進器制御装置のコンピュータを、
推進器を備える船舶の対地船速を目標船速に追従させる船速フィードバック制御により前記推進器の目標推進力を算出する算出部、
算出された前記目標推進力に従って、前記推進器を制御する制御部、
前記対地船速に対する前記目標船速の大小関係と、前記対地船速に対する前記船舶の対水船速の大小関係と、が一致するという特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記船速フィードバック制御の応答性が大きくなるように前記目標推進力を補正する補正部、
として機能させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、推進器制御装置、およびプログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
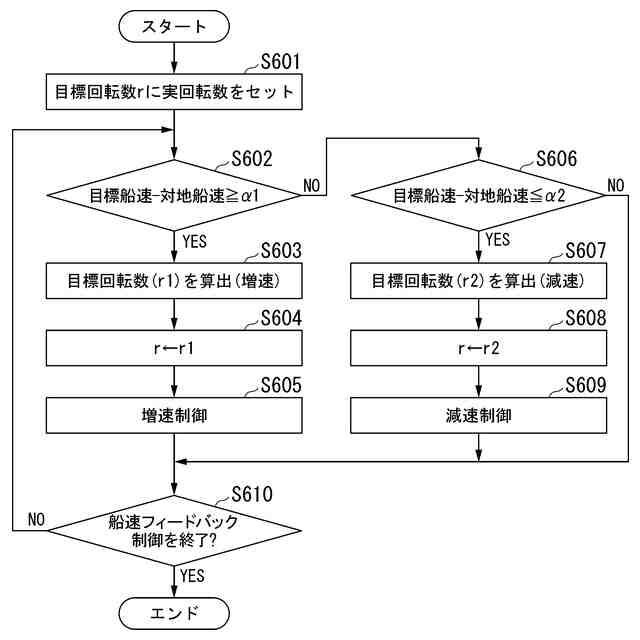
船舶では、実際の船速が目標船速に近付くように、エンジンへの回転指令を制御することが行われている。例えば、実際の船速と、目標船速との差に応じて、基本エンジン回転数を補正して目標エンジン回転数に設定し、目標エンジン回転数に基づいて、実際の船速が目標船速に近づくようにエンジンを制御する技術が開示されている(例えば、下記特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
特開2017-088119号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した従来技術では、海象や気象の影響によって、目標船速への追従性が安定しないことがある、という問題があった。
【0005】
上記事情に鑑み、本発明は、目標船速への追従性を安定させることができる技術を提供することを目的としている。
【課題を解決するための手段】
【0006】
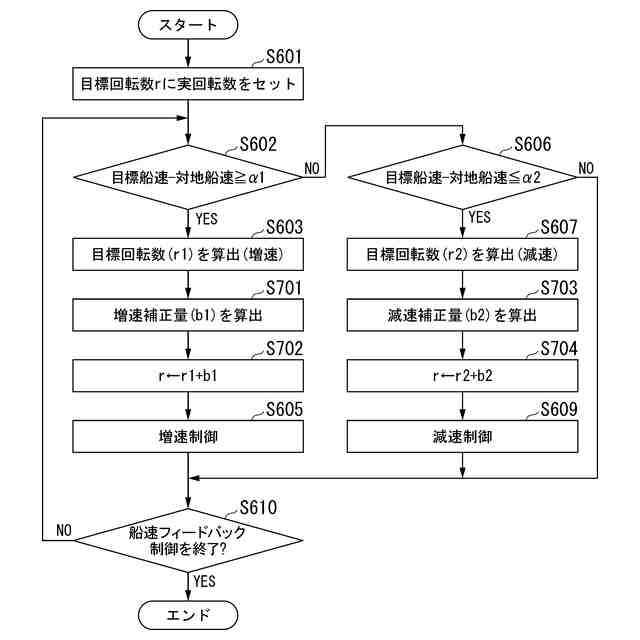
本発明の一態様に係る推進器制御装置は、推進器を備える船舶の対地船速を目標船速に追従させる船速フィードバック制御により前記推進器の目標推進力を算出する算出部と、算出された前記目標推進力に従って、前記推進器を制御する制御部と、前記対地船速に対する前記目標船速の大小関係と、前記対地船速に対する前記船舶の対水船速の大小関係と、が一致するという特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記船速フィードバック制御の応答性が大きくなるように前記目標推進力を補正する補正部と、を備える推進器制御装置である。
上記構成によれば、加減速を行う場合に、追い潮または逆潮に応じた最適な目標推進力とすることができる。したがって、海象や気象の影響にかかわらず、目標船速への追従性を安定させることができる。
【0007】
上記構成において、前記算出部は、前記対地船速と前記対水船速の差分から補正量を算出し、前記補正部は、前記船速フィードバック制御により算出した前記目標推進力に前記補正量を加えることで、前記船速フィードバック制御の応答性を補正し、前記補正量は、前記特定条件が満たされない場合よりも前記特定条件が満たされる場合の方が大きくなるようにしてもよい。
上記構成によれば、追い潮時に減速する場合や逆潮時に増速する場合に、目標船速への追従性を安定させることができる。
【0008】
上記構成において、前記補正部は、前記船速フィードバック制御におけるゲインを、前記特定条件が満たされない場合よりも前記特定条件が満たされる場合の方が大きくなるように補正するようにしてもよい。
上記構成によれば、追い潮時に減速する場合や逆潮時に増速する場合に、オーバーシュートを抑えつつ、目標推進力に最適なタイミングで追従させることができる。
【0009】
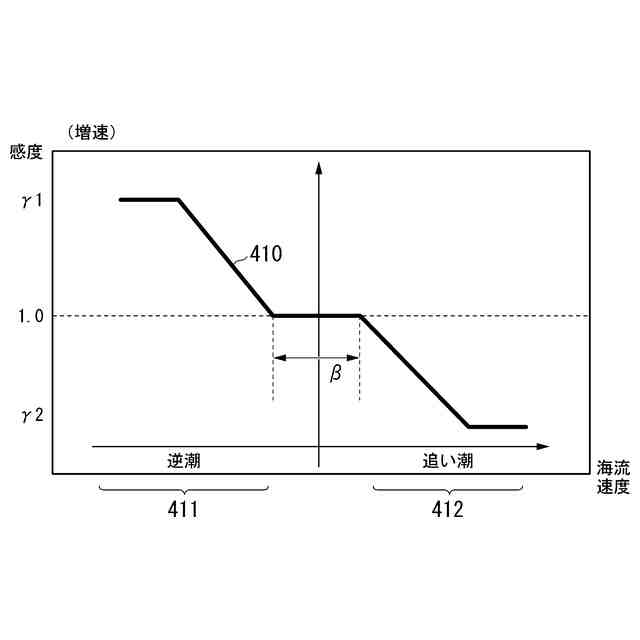
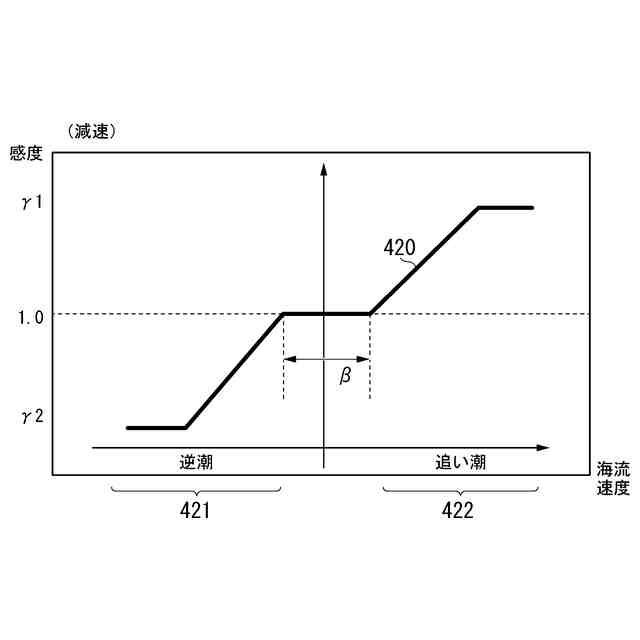
上記構成において、前記補正部は、前記特定条件が満たされる場合、前記対地船速と前記対水船速との差分が大きくなるほど前記応答性が大きくなるように補正し、前記差分が小さくなるほど前記応答性が小さくなるように補正するようにしてもよい。
上記構成によれば、海流速度に応じた最適な目標推進力に補正することができる。したがって、目標船速への追従性をより安定させることができる。
【0010】
上記構成において、前記推進器は、可変ピッチプロペラおよび主機を含み、前記船速フィードバック制御では、前記対地船速と前記対水船速との差分に基づいて、前記目標推進力である前記可変ピッチプロペラの目標翼角と前記主機の目標回転数とがそれぞれ算出され、前記補正部は、前記特定条件が満たされる場合、前記特定条件が満たされない場合よりも前記応答性が大きくなるように前記目標翼角を補正し、前記目標回転数を補正しないようにしてもよい。
上記構成によれば、翼角を変動させることによって、実船速への追従性を改善するため、エンジン111の回転数を変動させると仮定した場合と比較して、燃費の低下を回避しつつ、目標船速への追従性をより安定させることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
川下り用船
今日
個人
シーアンカー
2か月前
個人
発電船
1か月前
個人
船舶用プロペラ
9か月前
個人
水難救命スーツ
10か月前
個人
流体抵抗低減省エネ船
8か月前
小柳建設株式会社
台船
3か月前
個人
簡易型ライフジャケット
10か月前
個人
浮体式洋上風力発電方式
11か月前
ウラカミ合同会社
曳航ロボット
3か月前
個人
船舶推進装置
10か月前
炎重工株式会社
移動体
1か月前
個人
水陸両用移動装置
3か月前
ダイハツ工業株式会社
ジャケット
4か月前
ヤマハ発動機株式会社
船舶
11か月前
個人
海洋「いかだ」上の風力発電システム
8か月前
ヤマハ発動機株式会社
救難艇
10か月前
個人
浮体式足場のブイ組立体
10か月前
誠加興業股分有限公司
呼吸用マスク
3か月前
株式会社テラサン
位置保持システム
1か月前
トヨタ自動車株式会社
ガンネル治具
6か月前
個人
キャタピラ推進式高速船
7か月前
ヤマハ発動機株式会社
小型船舶
11か月前
川崎汽船株式会社
ドライアイス輸送船
5か月前
ヤマハ発動機株式会社
小型船舶
11か月前
株式会社神戸タフ興産
船舶の甲板構造
今日
株式会社 ASC
航海用低燃費航行方法
9か月前
個人
搬送器材
8か月前
サームトロン株式会社
外付けスラスタ装置
8か月前
株式会社小野田産業
シェルタ
5か月前
高階救命器具株式会社
救命具
5か月前
株式会社 神崎高級工機製作所
減速逆転機
10か月前
日立造船株式会社
浮体構造物
10か月前
ASTI株式会社
操作機構取付構造
28日前
個人
水中観察ボート、曲肱システム及び動揺病軽減
6か月前
ヤマト発動機株式会社
レース艇
8日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ