TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024161566
公報種別
公開特許公報(A)
公開日
2024-11-19
出願番号
2024139782,2023076164
出願日
2024-08-21,2018-12-03
発明の名称
人力駆動車用の制御装置
出願人
株式会社シマノ
代理人
個人
,
個人
主分類
B62M
6/45 20100101AFI20241112BHJP(鉄道以外の路面車両)
要約
【課題】アシストモータを好適に制御できる人力駆動車両用制御装置を提供する。
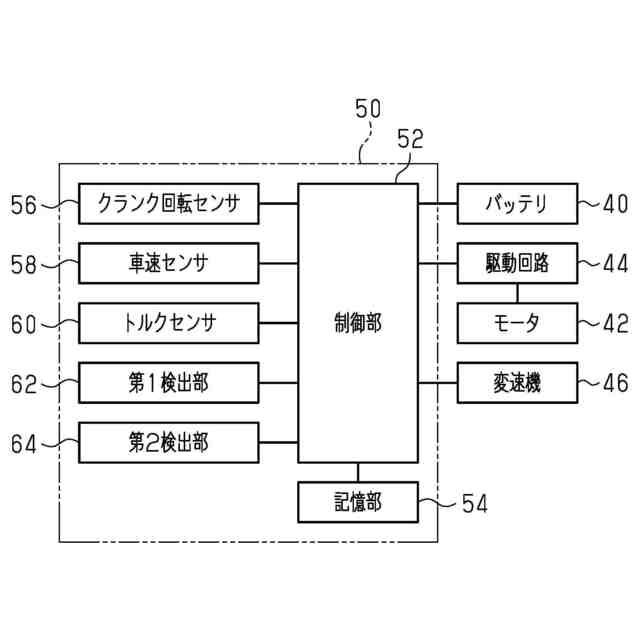
【解決手段】人力駆動車用の制御装置は、車輪の回転数をクランクの回転数で割った商で定義される回転比率を変更する変速機を備える人力駆動車の推進をアシストするアシストモータの出力を、前記クランクに入力される人力駆動力に応じて制御する制御部を含み、前記制御部は、所定範囲に含まれる前記変速機の変速変数と、前記所定範囲外に含まれる前記変速機の前記変速変数と、の差分に応じて、前記アシストモータの出力上限値、前記アシストモータの出力、および、前記人力駆動力に対する前記アシストモータの出力比率の少なくとも1つを制御する。
【選択図】図2
特許請求の範囲
【請求項1】
人力駆動車用の制御装置であって、
車輪の回転数をクランクの回転数で割った商で定義される回転比率を変更する変速機を備える前記人力駆動車の推進をアシストするアシストモータの出力を、前記クランクに入力される人力駆動力に応じて制御する制御部を含み、
前記制御部は、変速指令値を設定して前記変速機を駆動させ、
前記変速指令値は、前記変速機の動作位置、前記動作位置によって形成される変速比、および、前記回転比率の少なくとも1つに関する情報を含み、
前記制御部は、所定範囲に含まれ、前記変速指令値と対応する前記変速機の変速変数と、前記所定範囲外に含まれる前記変速機の前記変速変数と、の差分に応じて、前記アシストモータの出力上限値、前記アシストモータの出力、および、前記人力駆動力に対する前記アシストモータの出力比率の少なくとも1つを制御し、
前記変速指令値と対応する前記変速変数を記憶する記憶部をさらに含み、
前記所定範囲に含まれる前記変速機の前記変速変数は、前記記憶部に記憶される前記変速指令値と対応する前記変速変数であり、
前記制御部は、前記記憶部に記憶される前記変速指令値と対応する前記変速変数と、検出部によって検出される前記変速変数との差分に応じて、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つを制御し、
前記変速変数は、前記変速機の前記動作位置に関するものであり、
前記制御部は、前記変速機の前記動作位置が前記所定範囲外の第1範囲に含まれる場合、前記検出部によって検出される前記変速機の前記動作位置と、前記記憶部に記憶される前記変速指令値と対応する前記動作位置との差分が大きいほど前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つの増加量を大きくし、
前記第1範囲に含まれる前記回転比率は、前記所定範囲に含まれる前記回転比率よりも大きい、制御装置。
続きを表示(約 1,500 文字)
【請求項2】
前記制御部は、前記変速機の前記動作位置が前記第1範囲と異なり、かつ、前記所定範囲に含まれない第2範囲に含まれる場合、前記検出部によって検出される前記変速機の前記動作位置と、前記記憶部に記憶される前記変速指令値と対応する前記動作位置との差分が大きいほど、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つの減少量を大きくし、
前記第2範囲に含まれる前記回転比率は、前記所定範囲に含まれる前記回転比率よりも小さい、請求項1に記載の制御装置。
【請求項3】
人力駆動車用の制御装置であって、
車輪の回転数をクランクの回転数で割った商で定義される回転比率を変更する変速機を備える前記人力駆動車の推進をアシストするアシストモータの出力を、前記クランクに入力される人力駆動力に応じて制御する制御部を含み、
前記制御部は、変速指令値を設定して前記変速機を駆動させ、
前記変速指令値は、前記変速機の動作位置、前記動作位置によって形成される変速比、および、前記回転比率の少なくとも1つに関する情報を含み、
前記制御部は、所定範囲に含まれ、前記変速指令値と対応する前記変速機の変速変数と、前記所定範囲外に含まれる前記変速機の前記変速変数と、の差分に応じて、前記アシストモータの出力上限値、前記アシストモータの出力、および、前記人力駆動力に対する前記アシストモータの出力比率の少なくとも1つを制御し、
前記変速指令値と対応する前記変速変数を記憶する記憶部をさらに含み、
前記所定範囲に含まれる前記変速機の前記変速変数は、前記記憶部に記憶される前記変速指令値と対応する前記変速変数であり、
前記制御部は、前記記憶部に記憶される前記変速指令値と対応する前記変速変数と、検出部によって検出される前記変速変数との差分に応じて、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つを制御し、
前記変速変数は、前記変速機の前記動作位置に関するものであり、
前記制御部は、前記変速機の前記動作位置が前記所定範囲に含まれない第2範囲に含まれる場合、前記検出部によって検出される前記変速機の前記動作位置と、前記記憶部に記憶される前記変速指令値と対応する前記動作位置との差分が大きいほど、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つの減少量を大きくし、
前記第2範囲に含まれる前記回転比率は、前記所定範囲に含まれる前記回転比率よりも小さい、制御装置。
【請求項4】
前記制御部は、前記所定範囲に含まれる前記変速変数と、前記所定範囲外に含まれる前記変速変数と、の差分が大きくなるほど、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つを大きくする、請求項1から3のいずれか一項に記載の制御装置。
【請求項5】
前記制御部は、前記所定範囲に含まれる前記変速変数と、前記所定範囲外に含まれる前記変速変数と、の差分が大きくなるほど、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つを直線的、段階的、または、指数関数的に大きくする、請求項4に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、人力駆動車用の制御装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
例えば、特許文献1に開示されている人力駆動車用制御装置は、人力駆動車両に入力される人力駆動力に対するアシストモータの出力の比率が所定の比率になるようにアシストモータを制御している。
【先行技術文献】
【特許文献】
【0003】
特開平10-59260号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明の目的は、アシストモータを好適に制御できる人力駆動車両用制御装置を提供することである。
【課題を解決するための手段】
【0005】
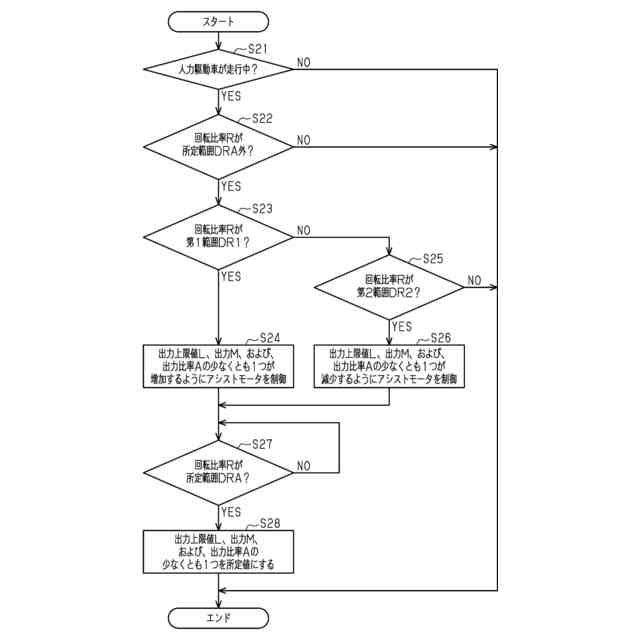
本発明の第1側面に従う制御装置は、人力駆動車用の制御装置であって、車輪の回転数をクランクの回転数で割った商で定義される回転比率を変更する変速機を備える人力駆動車の推進をアシストするアシストモータの出力を、前記クランクに入力される人力駆動力に応じて制御する制御部を含み、前記制御部は、前記人力駆動車の走行中において、前記変速機の変速変数が所定範囲外の第1範囲にあり、かつ、前記変速機の変速変数が前記第1範囲に含まれる状態における前記回転比率が、前記変速変数が前記所定範囲に含まれる状態における前記回転比率よりも大きい場合に、前記アシストモータの出力上限値、前記アシストモータの出力、および、前記人力駆動力に対する前記アシストモータの出力比率の少なくとも1つが増加するように前記アシストモータを制御する。
上記第1側面の制御装置によれば、変速変数に応じて、アシストモータの出力上限値、アシストモータの出力、および、人力駆動力に対するアシストモータの出力比率の少なくとも1つが増加するようにアシストモータを制御できる。このため、アシストモータを好適に制御できる。
【0006】
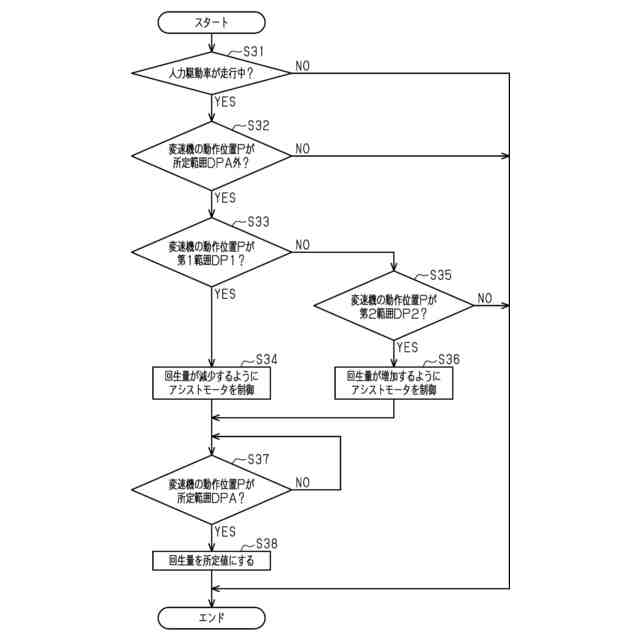
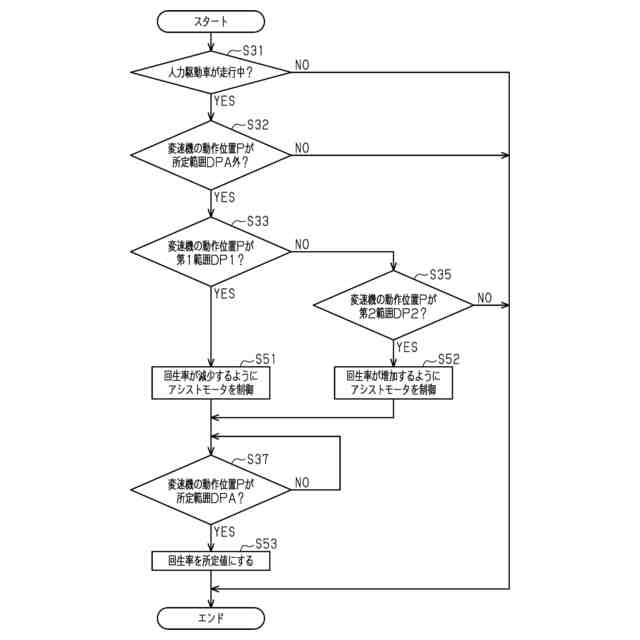
前記第1側面に従う第2側面の制御装置において、前記変速変数は前記変速機の動作位置に関するものであり、前記動作位置が前記第1範囲にある場合の前記回転比率は、前記動作位置が前記所定範囲にある場合の前記回転比率よりも大きい。
上記第2側面の制御装置によれば、回転比率が大きい場合、アシストモータの出力上限値、アシストモータの出力、および、人力駆動力に対するアシストモータの出力比率の少なくとも1つが増加するようにアシストモータを制御するため、ライダの負荷を低減できる。
【0007】
前記第1側面に従う第3側面の制御装置において、前記制御部は、前記変速機の変速変数が、前記第1範囲と異なり、かつ、前記所定範囲に含まれない第2範囲にある場合、前記アシストモータの前記出力上限値、前記アシストモータの前記出力、および、前記人力駆動力に対する前記アシストモータの前記出力比率の少なくとも1つが減少するように前記アシストモータを制御する。
上記第3側面の制御装置によれば、変速機の変速変数が第2範囲にある場合、アシストモータの出力上限値、アシストモータの出力、および、人力駆動力に対するアシストモータの出力比率の少なくとも1つが減少するようにアシストモータを制御するため、電力の消費量を抑制できる。
【0008】
前記第3側面に従う第4側面の制御装置において、前記変速変数は、前記変速機の動作位置に関するものであり、前記動作位置が前記第2範囲にある場合の前記回転比率は、前記動作位置が前記所定範囲にある場合の前記回転比率よりも小さい。
上記第4側面の制御装置によれば、変速機の動作位置が所定範囲にある場合の回転比率よりも小さい回転比率の場合、電力の消費量を抑制できる。
【0009】
前記第1側面に従う第5側面の制御装置において、前記変速変数は、前記回転比率に関するものである。
上記第5側面の制御装置によれば、回転比率に応じてアシストモータを好適に制御できる。
【0010】
前記第3側面に従う第6側面の制御装置において、前記変速変数は、前記回転比率に関するものであり、前記第2範囲に含まれる前記回転比率は、前記所定範囲に含まれる前記回転比率よりも小さい。
上記第6側面の制御装置によれば、回転比率が所定範囲にある場合よりも小さい回転比率の場合、電力の消費量を抑制できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社シマノ
ボトムブラケット組立体
3日前
株式会社シマノ
人力駆動車用の疲労度判定装置、および、人力駆動車の制御装置
9日前
株式会社シマノ
人力駆動車用の制御装置
5日前
株式会社シマノ
人力駆動車用の制御装置
5日前
個人
重量物移動台車
7か月前
個人
自転車用傘捕捉具
25日前
個人
体重掛けリフト台車
3日前
井関農機株式会社
作業機
8か月前
個人
自転車用荷台
4か月前
個人
車両用横転防止装置
8か月前
日本精機株式会社
表示装置
9か月前
三甲株式会社
保護具
8か月前
個人
クリアレインシェード
7か月前
井関農機株式会社
作業車両
5か月前
個人
アタッチメント
26日前
個人
自転車用荷物台
9日前
株式会社ホシプラ
台車
7か月前
株式会社CPM
駐輪機
1か月前
株式会社北誠商事
被覆構造体
9か月前
株式会社クラベ
面状ユニット
6か月前
個人
スライドレインプルーフ
6か月前
個人
ステアリングの操向部材
3か月前
三甲株式会社
台車
3か月前
祖峰企画株式会社
平台車
4か月前
三甲株式会社
台車
3か月前
三甲株式会社
台車
8か月前
帝人株式会社
車両構造体
6か月前
豊田合成株式会社
ハンドル
7か月前
豊田合成株式会社
操舵装置
1か月前
ヤマハ発動機株式会社
車両
8か月前
ヤマハ発動機株式会社
車両
1か月前
井関農機株式会社
走行車両
8か月前
ヤマハ発動機株式会社
車両
1か月前
ヤマハ発動機株式会社
車両
1か月前
個人
足踏みペダル式自転車
6か月前
ヤマハ発動機株式会社
車両
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ