TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024161310
公報種別
公開特許公報(A)
公開日
2024-11-18
出願番号
2023076412
出願日
2023-05-06
発明の名称
把持装置及びロボットアーム
出願人
ハンドトラスト株式会社
代理人
個人
主分類
B25J
15/08 20060101AFI20241111BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 対象物が、必要最低限の力で把持され、位置決めをしなくも、対象物を把持するまでの時間が長くならず、対象物が動く場合や軟体物の場合であっても、把持可能であり、大幅に小さい対象物や大幅に大きい対象物であっても把持可能である、把持装置及びロボットアームを提供する。
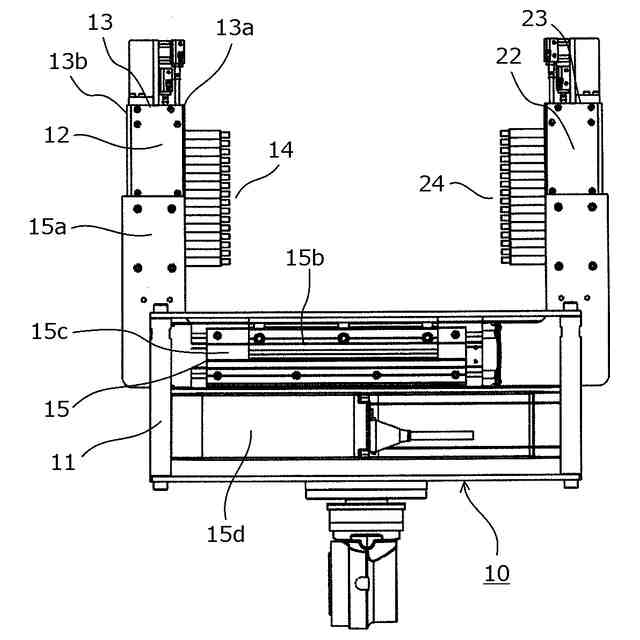
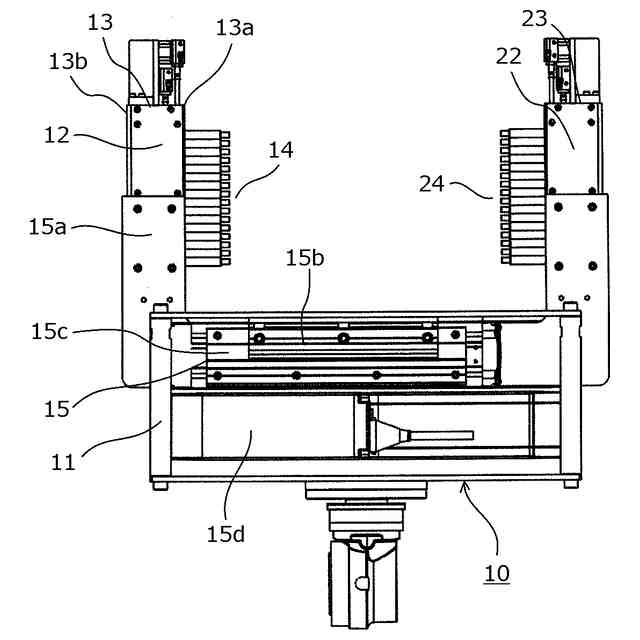
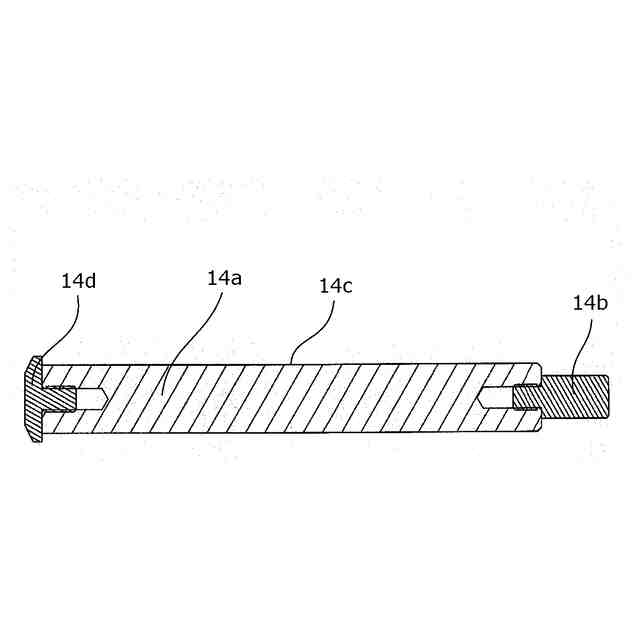
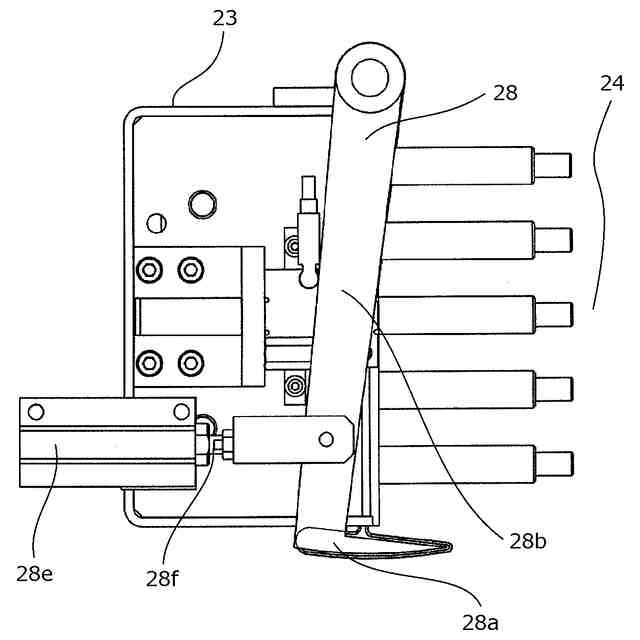
【解決手段】 対向する第一の把持手段12と第二の把持手段22からなり、第一の把持手段12は、中空部分を含む第一筐体13と、第一筐体13を移動可能とする第一可変制御部15と、対象物と当接する複数個の第一当接部材14と、第一当接部材検出手段と、第一ロック部とを備え、第二の把持手段22は、中空部分を含む第二筐体23と、第二筐体23を移動可能とする第二可変制御部と、対象物と当接する複数個の第二当接部材24と、第二当接部材検出手段と、第二ロック部と、を備えた把持装置10等により課題を解決した。
【選択図】 図1
特許請求の範囲
【請求項1】
対向する位置に配置された、第一の把持手段と第二の把持手段からなる一対の把持手段によって、対象物を把持する把持装置であって、
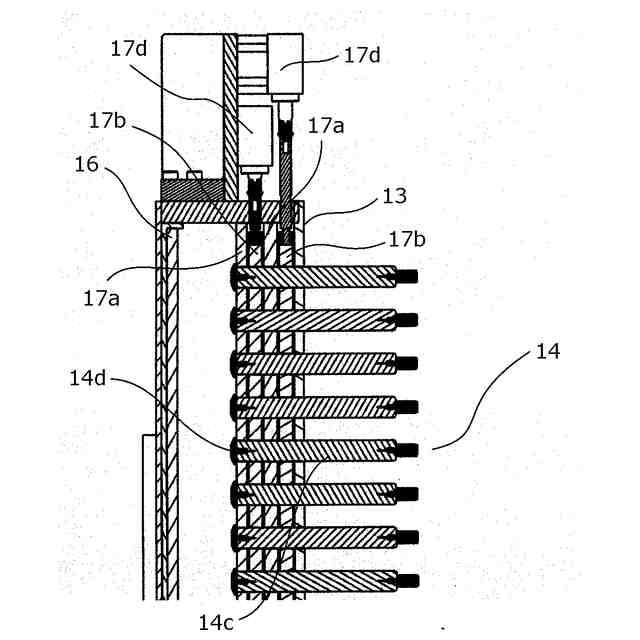
前記把持装置は、中空部分を含む、第一筐体と、該第一筐体の内部から前記第二の把持手段と対向する該第一筐体の対向面を貫通し、該第一筐体の背面を貫通せず、所望により前記対象物と当接する、複数個の第一当接部材と、を有する第一の把持手段と、該第一筐体の位置を適宜変更可能とする第一可変制御部と、該第一筐体の内部に収納され、該複数個の第一当接部材のうち所定の位置に移動した第一当接部材を検出する第一当接部材検出手段と、該第一筐体の内部に収納され、該複数個の第一当接部材を不動状態に固定可能とする板状物の集合体からなる第一固定部材を含む、第一ロック部と、中空部分を含む、第二筐体と、該第二筐体の内部から、前記第一の把持手段と対向する該第二筐体の対向面を貫通し、該第二筐体の背面を貫通せず、所望により前記対象物と当接する、複数個の第二当接部材と、を有する第二の把持手段と、該第二筐体の位置を適宜変更可能とする第二可変制御部と、該第二筐体の内部に収納され、該複数個の第二当接部材のうち所定の位置に移動した第二当接部材を検出する第二当接部材検出手段と、該第二筐体の内部に収納され、該複数個の第二当接部材を不動状態に固定可能とする板状物の集合体からなる第二固定部材を含む、第二ロック部と、を備える、ことを特徴とする把持装置。
続きを表示(約 1,100 文字)
【請求項2】
前記把持装置は、さらに、前記第一筐体の中空部分及び/又は前記第二筐体の中空部分を所定の圧力に保つために用いる圧力調整部を備える、ことを特徴とする請求項1に記載の把持装置。
【請求項3】
前記第一筐体は、さらに、前記対象物の落下を防止する第一落下防止部材を有し、かつ前記第二筐体は、さらに、前記対象物の落下を防止する第二落下防止部材を有する、ことを特徴とする請求項1に記載の把持装置。
【請求項4】
前記第一筐体は、さらに、前記対象物の落下を防止する第一落下防止部材を有し、かつ前記第二筐体は、さらに、前記対象物の落下を防止する第二落下防止部材を有する、ことを特徴とする請求項2に記載の把持装置。
【請求項5】
前記第一ロック部は、前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出し、かつ前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出した後、前記複数個の第一当接部材を不動状態に固定し、前記第二ロック部は、前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出し、かつ前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出した後、前記複数個の第二当接部材を不動状態に固定することを特徴とする請求項1に記載の把持装置。
【請求項6】
前記第一ロック部は、前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出し、かつ前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出した後、前記複数個の第一当接部材を不動状態に固定し、前記第二ロック部は、前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出し、かつ前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出した後、前記複数個の第二当接部材を不動状態に固定することを特徴とする請求項2に記載の把持装置。
【請求項7】
前記第一ロック部は、前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出し、かつ前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出した後、前記複数個の第一当接部材を不動状態に固定し、前記第二ロック部は、前記第二当接部材検出手段で所定の位置に移動した第二当接部材を検出し、かつ前記第一当接部材検出手段で所定の位置に移動した第一当接部材を検出した後、前記複数個の第二当接部材を不動状態に固定することを特徴とする請求項4に記載の把持装置。
【請求項8】
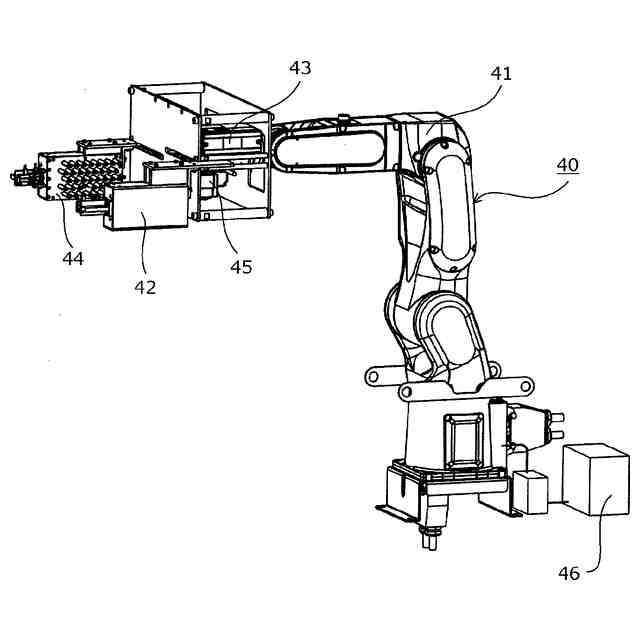
請求項1~7のいずれか1項に記載の把持装置を有してなることを特徴とするロボットアーム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、対象物を把持するための把持装置及びこの把持装置を備えたロボットアームに関するものである。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
ロボットハンドは、現在、種々の産業分野において使用されている。
【0003】
ロボットハンドに用いられている把持方法としては、例えば、指や爪などで対象物を挟んで掴むものや真空や磁力を用いて対象物を吸着させるものなどが挙げられる。
【0004】
これらの把持方法は、対象物の形状、大きさ、重量、材質、硬さ等に応じて、指や爪などの本数、長さ、形状、吸着方法等を、対象物に合わせ、見極める必要があり、対象物の形状、大きさ、重量、材質、硬さ等がほぼ一定の場合には好適であるが、対象物の形状、大きさ、重量、材質、硬さ等が急激に変わると、臨機応変に対応することができず、通常、その都度、設計の変更などを行わなければならないという欠点がある。
【0005】
様々な形状、大きさ、材質の対象物を把持することが可能となる把持方法としては、密度が低いと流体的な特性を持ち、密度が高いと固体的な特性を持つ「ジャミング転移現象」を利用した、砂や粉などの粉末素材を袋に入れたもの(ユニバーサルジャミンググリッパ)が挙げられる。
【0006】
しかしながら、ユニバーサルジャミンググリッパは、対象物の形状、大きさ、材質の急激な変化には対応できるものの、袋部分が破損すると使用できなくなるため、鋭利な対象物には不適であり、他の把持方法と比べ、耐久性(袋部分)に乏しく、構造原理から、対象物の重量に応じて、対象物との把持部分を交換又は再設計しなければならないという欠点がある。
【0007】
以上の欠点を解決するものとして、例えば、特許文献1に記載されている、対象物の表面形状に対応するように独立して移動した多数のシャフトを、シャフト1本毎に設置された、アウターリング、インナーリング、転動体及びスプリングを備える変位規制機構(ロック機構)で固定し、多数のシャフトの一端の先端部の接点により対象物を把持する、三次元万力(ならい機構)を利用した把持方法が挙げられる。
【先行技術文献】
【特許文献】
【0008】
特開2020-172016号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載された三次元万力を利用した把持方法では、対向する把持手段(ならいユニット)の固定部とU字状に形成されたベース材とが固定される一方で、把持手段に設けられた複数のシャフトが、適宜、一対の把持手段の隙間方向を移動するため、対象物を一対の把持手段の中央に配置しなければ、対象物を把持するまでの時間が長くなるという問題点があり、対象物が動く場合や軟体物の場合には、対象物を把持できないという問題点もある。
【0010】
また、特許文献1に記載された三次元万力を利用した把持方法では、シャフト1本毎に、対象物との当接部と移動部材の間にスプリングが設置されているため、対象物を把持して移動させると、当接部と移動部材の間に設置されたスプリングの反力により、状況によっては、対象物の変形や破損等が起こるという問題点もある。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
個人
メンテナンス用スタンド
4か月前
川崎重工業株式会社
ロボット
今日
株式会社マキタ
打撃工具
20日前
川崎重工業株式会社
罫書用治具
5か月前
CKD株式会社
把持装置
3か月前
オムロン株式会社
電動把持工具
2か月前
東京計器株式会社
接触検知装置
3か月前
トヨタ自動車株式会社
ロボット
3か月前
株式会社マキタ
動力工具
6か月前
学校法人立命館
グリッパ
3か月前
株式会社ダイヘン
制御装置
28日前
株式会社エビス
携帯付属物取付具
20日前
株式会社ダイヘン
搬送装置
1か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
個人
回転工具およびバリ取り部品
3か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社ダイヘン
搬送装置
20日前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社マキタ
電動ハンマ
1か月前
白山工業株式会社
ロボットアーム
3か月前
国立大学法人山形大学
二重関節機構
6か月前
株式会社日本キャリア工業
ロボットハンド
4か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ


































