TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024160520
公報種別
公開特許公報(A)
公開日
2024-11-14
出願番号
2023075614
出願日
2023-05-01
発明の名称
荷役車両
出願人
株式会社豊田自動織機
代理人
個人
,
個人
主分類
B66F
9/24 20060101AFI20241107BHJP(巻上装置;揚重装置;牽引装置)
要約
【課題】クランプ装置によりワークをクランプする際の作業効率を向上できる荷役車両を提供する。
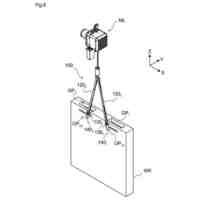
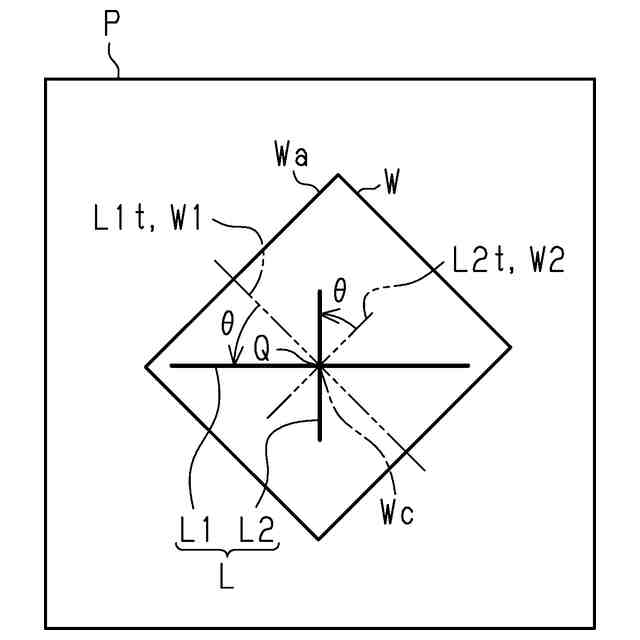
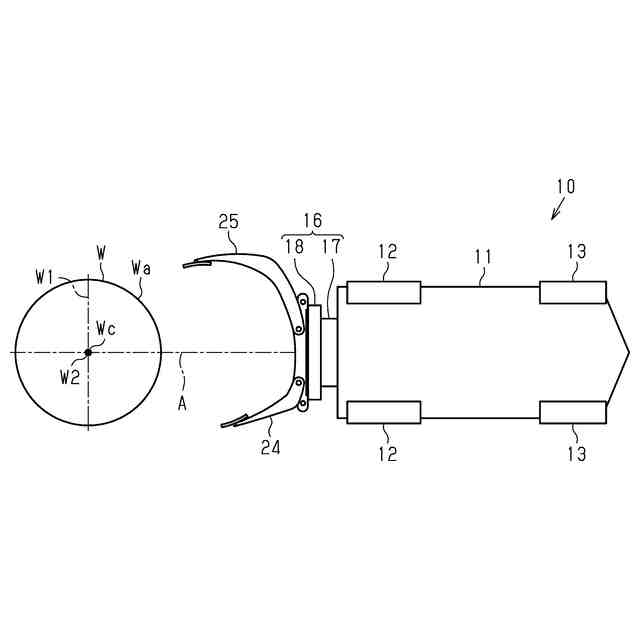
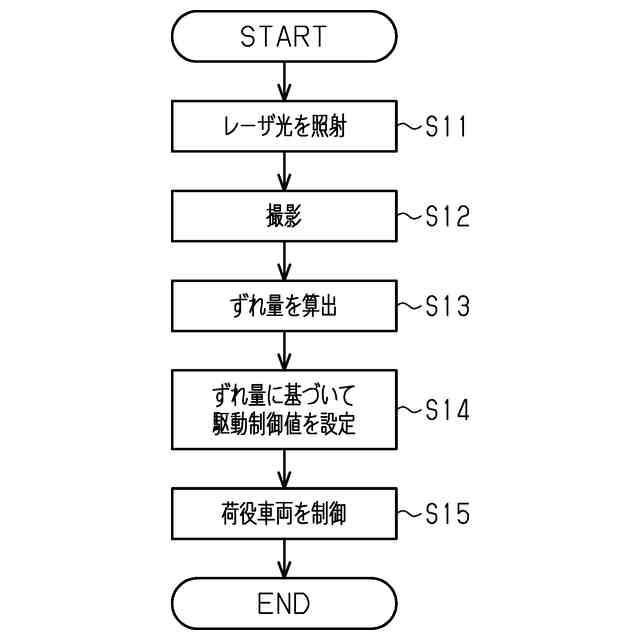
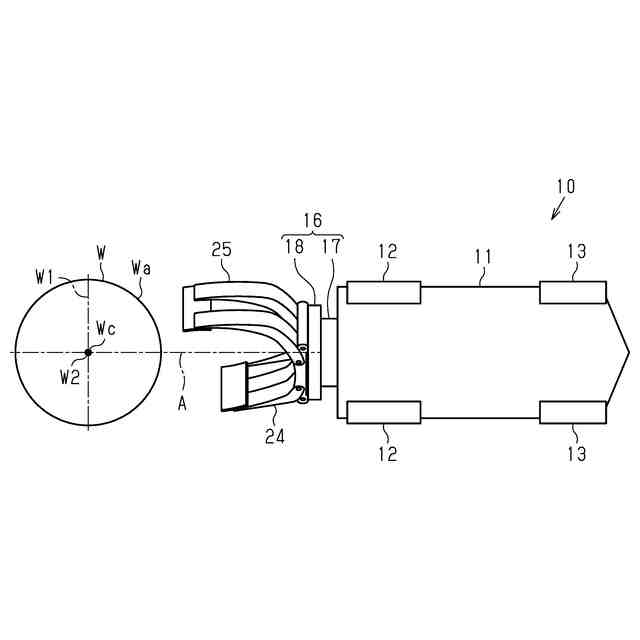
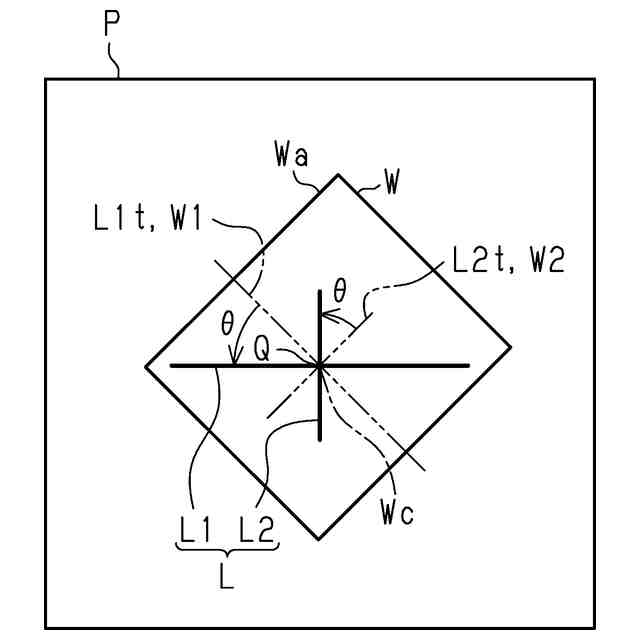
【解決手段】荷役車両は、クランプ装置に設けられ、車両本体の前方に向かって第1レーザ光L1及び第2レーザ光L2からなるレーザ光Lを照射するレーザ光照射部と、クランプ装置に設けられ、レーザ光照射部によるレーザ光Lの照射中に車両本体の前方を撮影する撮影部とを備えている。制御装置は、撮影部による撮影画像Pから、ワークWの第1中心線W1に対する第1レーザ光L1のずれ量、及びワークWの第2中心線W2に対する第2レーザ光L2のずれ量を算出する。制御装置は、算出したずれ量に基づいて、第1レーザ光L1が第1中心線W1と一致し、かつ第2レーザ光L2が第2中心線W2と一致するように、走行装置、マスト装置、及びクランプ装置を制御することにより、ワークWに対するクランプ装置の位置及び回転角度を調整する。
【選択図】図9
特許請求の範囲
【請求項1】
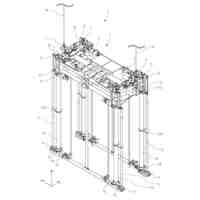
走行装置が設けられた車両本体と、
前記車両本体の前方に設けられ、上下方向に昇降可能なマストを有するマスト装置と、
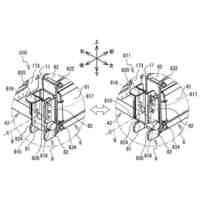
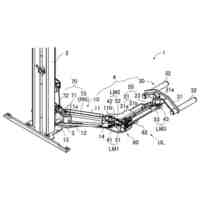
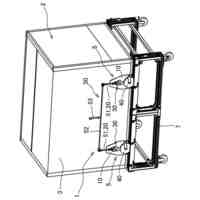
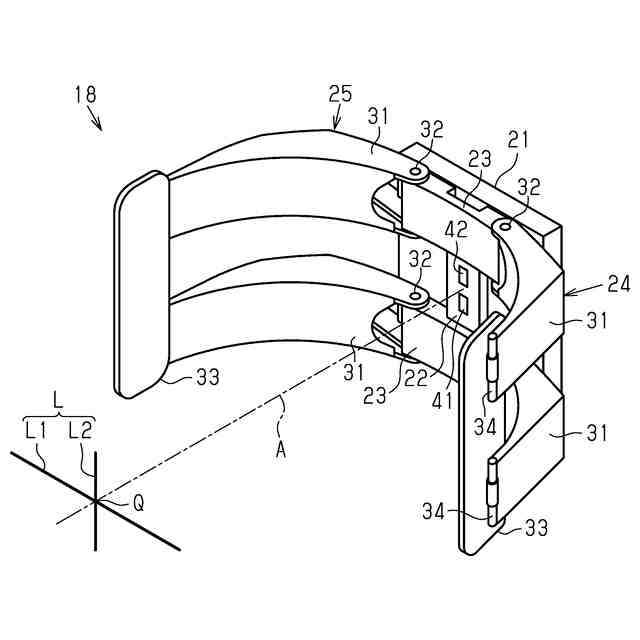
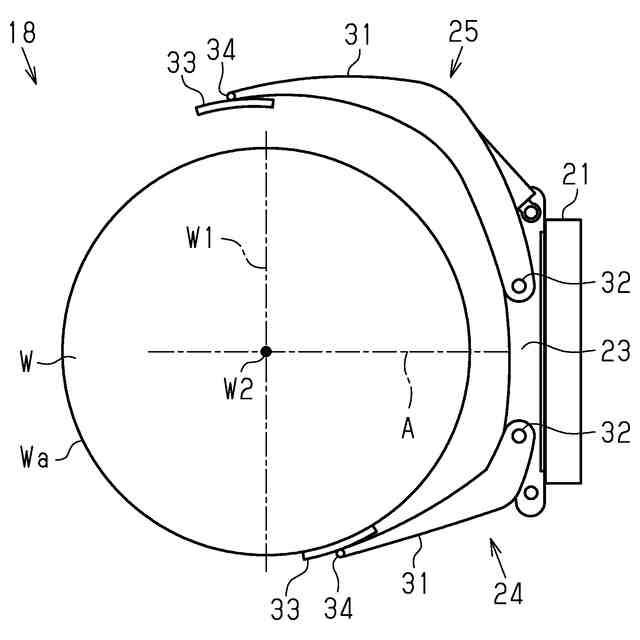
前記マストに対して前後方向に延びる回転軸線を中心に回転可能に設けられ、一対のアームの間隔を変化させることで、円筒状の周面を有するワークをクランプするクランプ装置と、
前記走行装置、前記マスト装置、及び前記クランプ装置を制御する制御装置と、
を備える荷役車両であって、
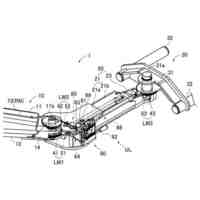
前記クランプ装置に設けられ、前記車両本体の前方に向かってレーザ光を照射するレーザ光照射部と、
前記クランプ装置に設けられ、前記レーザ光照射部による前記レーザ光の照射中に前記車両本体の前方を撮影する撮影部と、
を備え、
前記レーザ光は、前記一対のアームの対向方向に沿って延びる直線状の第1レーザ光、及び前記第1レーザ光と直交する直線状の第2レーザ光からなり、前記第1レーザ光と前記第2レーザ光との交点は前記回転軸線上に位置し、
前記制御装置は、
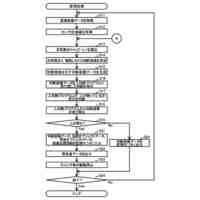
前記撮影部による撮影画像から、前記ワークの径方向に沿って延びるとともに前記ワークの軸方向の中心に位置する第1中心線に対する前記第1レーザ光のずれ量、及び前記ワークの軸方向に沿って延びるとともに前記ワークの径方向の中心に位置する第2中心線に対する前記第2レーザ光のずれ量を算出し、
算出した前記ずれ量に基づいて、前記第1レーザ光が前記第1中心線と一致し、かつ前記第2レーザ光が前記第2中心線と一致するように前記走行装置、前記マスト装置、及び前記クランプ装置を制御することにより、前記ワークに対する前記クランプ装置の位置及び回転角度を調整することを特徴とする荷役車両。
続きを表示(約 1,600 文字)
【請求項2】
前記制御装置は、前記走行装置、前記マスト装置、及び前記クランプ装置のうち、2つ以上の装置を制御する場合には、前記2つ以上の装置を同時に制御する請求項1に記載の荷役車両。
【請求項3】
前記第1レーザ光の長さと前記第2レーザ光の長さは異なる請求項1に記載の荷役車両。
【請求項4】
前記制御装置は、路面が平坦面である場合に設定される簡易調整モードが選択された場合、前記走行装置及び前記マスト装置のみを制御することにより、前記ワークに対する前記クランプ装置の位置のみを調整する請求項1に記載の荷役車両。
【請求項5】
前記制御装置は、前記第1レーザ光が前記第1中心線と一致し、かつ前記第2レーザ光が前記第2中心線と一致するときの前記撮影画像を教師画像として記憶しており、
前記教師画像における前記第1レーザ光に対する前記撮影画像における前記第1レーザ光のずれ量を算出することにより、前記第1中心線に対する前記第1レーザ光のずれ量を算出し、
前記教師画像における前記第2レーザ光に対する前記撮影画像における前記第2レーザ光のずれ量を算出することにより、前記第2中心線に対する前記第2レーザ光のずれ量を算出し、
算出した前記ずれ量に基づいて、前記撮影画像における前記第1レーザ光が前記教師画像における前記第1レーザ光と一致し、かつ前記撮影画像における前記第2レーザ光が前記教師画像における前記第2レーザ光と一致するように前記走行装置、前記マスト装置、及び前記クランプ装置を制御することにより、前記第1レーザ光が前記第1中心線と一致し、かつ前記第2レーザ光が前記第2中心線と一致するように前記走行装置、前記マスト装置、及び前記クランプ装置を制御する請求項1に記載の荷役車両。
【請求項6】
走行装置が設けられた車両本体と、
前記車両本体の前方に設けられ、上下方向に昇降可能なマストを有するマスト装置と、
前記マストに対して前後方向に延びる回転軸線を中心に回転可能に設けられ、一対のアームの間隔を変化させることで、円筒状の周面を有するワークをクランプするクランプ装置と、
前記走行装置、前記マスト装置、及び前記クランプ装置を制御する制御装置と、
を備える荷役車両であって、
前記クランプ装置に設けられ、前記車両本体の前方に向かってレーザ光を照射するレーザ光照射部と、
前記クランプ装置に設けられ、前記レーザ光照射部による前記レーザ光の照射中に前記車両本体の前方を撮影する撮影部と、
を備え、
前記レーザ光は、前記一対のアームの対向方向に沿って延びる直線状の第1レーザ光、及び前記第1レーザ光と直交する直線状の第2レーザ光からなり、前記第1レーザ光と前記第2レーザ光との交点は前記回転軸線上に位置し、
前記制御装置は、
前記ワークの径方向に沿って延びるとともに前記ワークの軸方向の中心に位置する第1中心線と前記第1レーザ光が一致し、かつ前記ワークの軸方向に沿って延びるとともに前記ワークの径方向の中心に位置する第2中心線と前記第2レーザ光が一致するときの撮影画像を教師画像として記憶しており、
前記教師画像における前記第1レーザ光に対する前記撮影画像における前記第1レーザ光のずれ量、及び前記教師画像における前記第2レーザ光に対する前記撮影画像における前記第2レーザ光のずれ量を算出し、
算出した前記ずれ量に基づいて、前記撮影画像における前記第1レーザ光が前記教師画像における前記第1レーザ光と一致し、かつ前記撮影画像における前記第2レーザ光が前記教師画像における前記第2レーザ光と一致するように前記走行装置、前記マスト装置、及び前記クランプ装置を制御することにより、前記ワークに対する前記クランプ装置の位置及び回転角度を調整することを特徴とする荷役車両。
発明の詳細な説明
【技術分野】
【0001】
本発明は、荷役車両に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
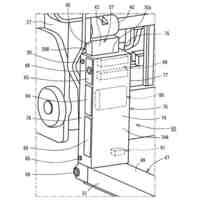
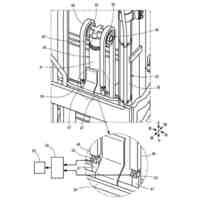
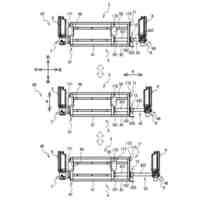
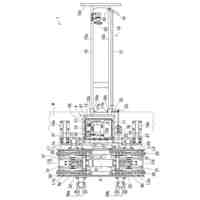
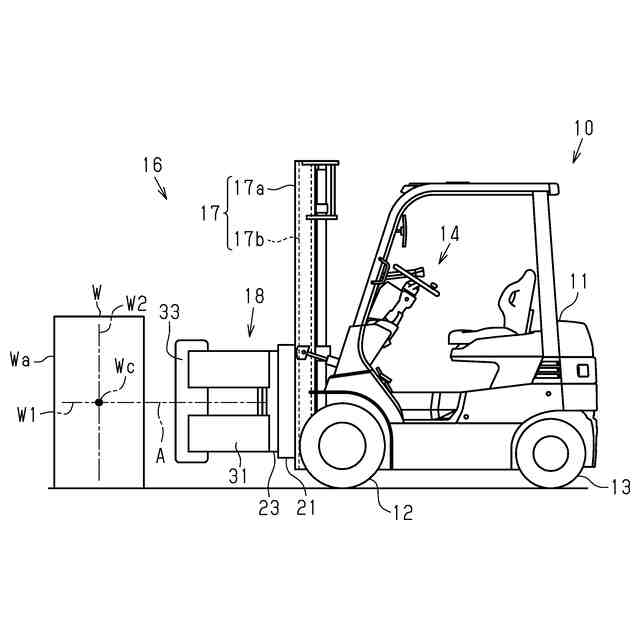
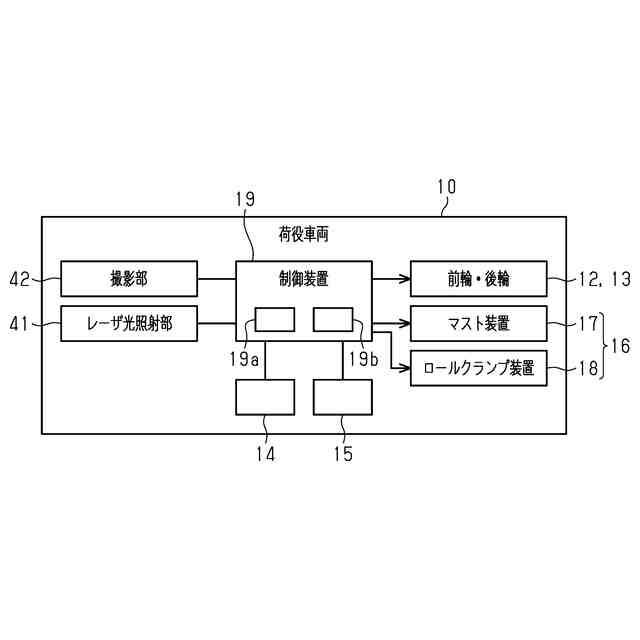
荷役車両は、車両本体と、マスト装置と、クランプ装置と、制御装置とを備えている。車両本体には、荷役車両を走行させるための走行装置が設けられている。マスト装置は、車両本体の前方に設けられている。マスト装置は、上下方向に昇降可能なマストを有している。クランプ装置は、マストに対して前後方向に延びる回転軸線を中心に回転可能に設けられている。クランプ装置は、一対のアームの間隔を変化させることで、円筒状の周面を有するワークをクランプする。制御装置は、走行装置、マスト装置、及びクランプ装置を制御する。
【0003】
例えば、クランプ装置の回転軸線上にワークの軸方向及び径方向の中心が位置していない場合など、ワークに対するクランプ装置の位置が適切でない場合、クランプ装置はワークを適切にクランプできないおそれがある。また、例えば、一対のアームがワークの周面に対して平行になっていない場合など、ワークに対するクランプ装置の回転角度が適切でない場合にも、クランプ装置はワークを適切にクランプできないおそれがある。特に、ワークがロール紙である場合、アームによってロール紙を傷つけるおそれがある。このため、荷役車両の運転者は、ワークに対するクランプ装置の位置及び回転角度を適切な位置及び角度に調整する必要がある。
【0004】
特許文献1に記載の荷役車両は、荷役車両の前方に向けてレーザ光を照射するレーザ発光器を備えている。運転者は、ワークに照射されたレーザ光により、ワークに対するクランプ装置の回転角度を確認しながら、ワークに対するクランプ装置の回転角度を調整することができる。
【先行技術文献】
【特許文献】
【0005】
特開2012-188211号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1では、運転者が荷役車両を操作することにより、ワークに対するクランプ装置の回転角度を調整する必要があるため、作業効率が良くない。また、特許文献1では、ワークに対するクランプ装置の位置を調整することは想定されていない。
【課題を解決するための手段】
【0007】
上記問題点を解決するための荷役車両は、走行装置が設けられた車両本体と、前記車両本体の前方に設けられ、上下方向に昇降可能なマストを有するマスト装置と、前記マストに対して前後方向に延びる回転軸線を中心に回転可能に設けられ、一対のアームの間隔を変化させることで、円筒状の周面を有するワークをクランプするクランプ装置と、前記走行装置、前記マスト装置、及び前記クランプ装置を制御する制御装置と、を備える荷役車両であって、前記クランプ装置に設けられ、前記車両本体の前方に向かってレーザ光を照射するレーザ光照射部と、前記クランプ装置に設けられ、前記レーザ光照射部による前記レーザ光の照射中に前記車両本体の前方を撮影する撮影部と、を備え、前記レーザ光は、前記一対のアームの対向方向に沿って延びる直線状の第1レーザ光、及び前記第1レーザ光と直交する直線状の第2レーザ光からなり、前記第1レーザ光と前記第2レーザ光との交点は前記回転軸線上に位置し、前記制御装置は、前記撮影部による撮影画像から、前記ワークの径方向に沿って延びるとともに前記ワークの軸方向の中心に位置する第1中心線に対する前記第1レーザ光のずれ量、及び前記ワークの軸方向に沿って延びるとともに前記ワークの径方向の中心に位置する第2中心線に対する前記第2レーザ光のずれ量を算出し、算出した前記ずれ量に基づいて、前記第1レーザ光が前記第1中心線と一致し、かつ前記第2レーザ光が前記第2中心線と一致するように前記走行装置、前記マスト装置、及び前記クランプ装置を制御することにより、前記ワークに対する前記クランプ装置の位置及び回転角度を調整することを要旨とする。
【0008】
上記構成によれば、レーザ光照射部は、ワークに対して、第1レーザ光及び第2レーザ光からなるレーザ光を照射する。撮影部は、レーザ光が照射されたワークを撮影する。制御装置は、撮影画像から、ワークの第1中心線に対する第1レーザ光のずれ量、及びワークの第2中心線に対する第2レーザ光のずれ量を算出する。制御装置は、算出したずれ量からワークに対するクランプ装置の位置及び回転角度を把握することができる。
【0009】
ワークに対するクランプ装置の位置及び回転角度が適切な位置及び角度であるとき、第1レーザ光は第1中心線と一致するとともに第2レーザ光は第2中心線と一致する。このため、制御装置は、算出したずれ量に基づいて、第1レーザ光が第1中心線と一致し、かつ第2レーザ光が第2中心線と一致するように走行装置、マスト装置、及びクランプ装置を制御する。これにより、ワークに対するクランプ装置の位置及び回転角度は、適切な位置及び角度に調整される。
【0010】
この場合、ワークに対するクランプ装置の位置及び回転角度は、荷役車両の運転者が走行装置、マスト装置、及びクランプ装置を操作しなくても、適切な位置及び角度となるように自動で調整される。したがって、クランプ装置によりワークをクランプする際の作業効率を向上できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
懸吊装置
8か月前
ユニパルス株式会社
吊具
10か月前
個人
海上コンテナ昇降装置
5か月前
ユニパルス株式会社
荷役装置
4か月前
ユニパルス株式会社
吊具装置
5か月前
株式会社豊田自動織機
産業車両
5か月前
株式会社豊田自動織機
荷役車両
9か月前
株式会社豊田自動織機
荷役車両
4か月前
水戸工業株式会社
吊り具
1か月前
株式会社豊田自動織機
荷役車両
3か月前
株式会社日本キャリア工業
昇降機
8か月前
白山工業株式会社
バランサ
1か月前
ユニパルス株式会社
荷役助力装置
20日前
株式会社キトー
タイヤ用吊具
18日前
株式会社ユピテル
システム等
1か月前
個人
建築部材の吊り上げ装置
7か月前
株式会社豊田自動織機
フォークリフト
2か月前
株式会社大林組
養生方法
7か月前
フジテック株式会社
エレベータ
4か月前
新英運輸株式会社
自動車用台車
17日前
株式会社豊田自動織機
フォークリフト
10か月前
白山工業株式会社
腕重量補償機構
7か月前
ウエダ産業株式会社
鋼板保持装置
9か月前
フジテック株式会社
エスカレータ
1か月前
株式会社タダノ
高所作業車
7か月前
有限会社サエキ
玉掛用器具
5か月前
ブラザー工業株式会社
架台
10か月前
ブラザー工業株式会社
架台
10か月前
小野谷機工株式会社
ジャッキ装置
10か月前
株式会社キトー
吊具
8か月前
株式会社スギヤス
車両整備用リフト
5か月前
株式会社慧泉
搬送装置
10か月前
ダイハツ工業株式会社
荷箱移動装置
11か月前
株式会社タダノ
クレーン装置
10か月前
株式会社キトー
巻上機
10か月前
株式会社スギヤス
車両整備用リフト
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ