TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024158355
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023073496
出願日
2023-04-27
発明の名称
移動ロボット及びロボットシステム
出願人
グローリー株式会社
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20241031BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】作業ロボットを搭載する移動ロボットの汎用性を向上する。
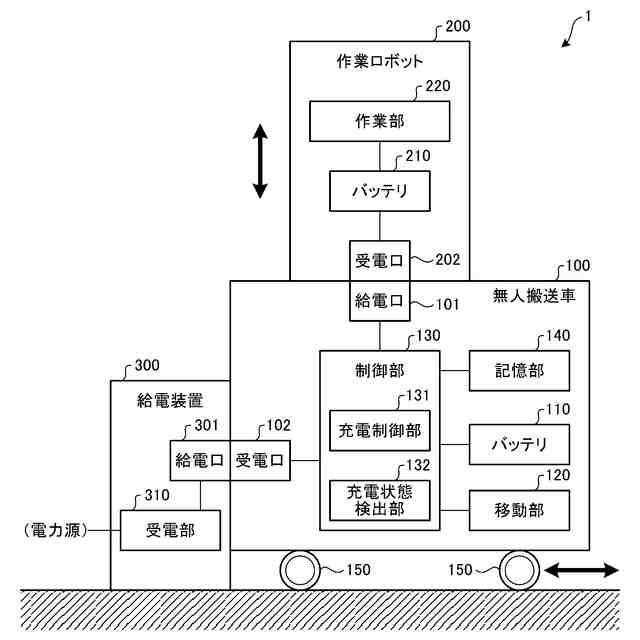
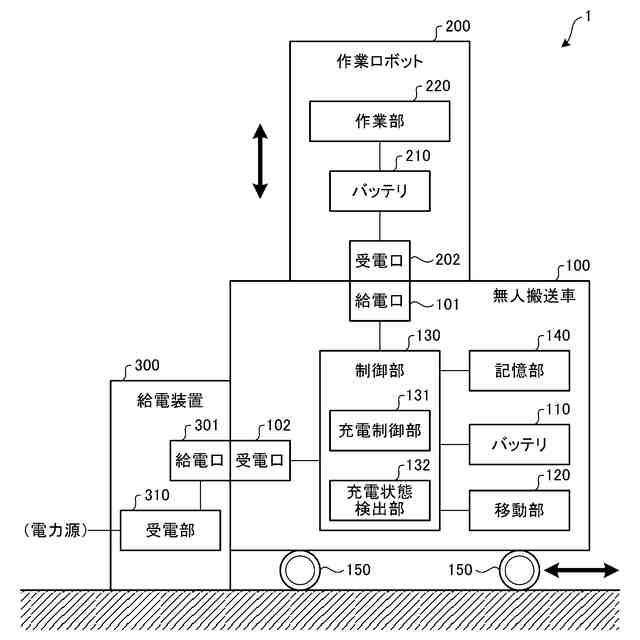
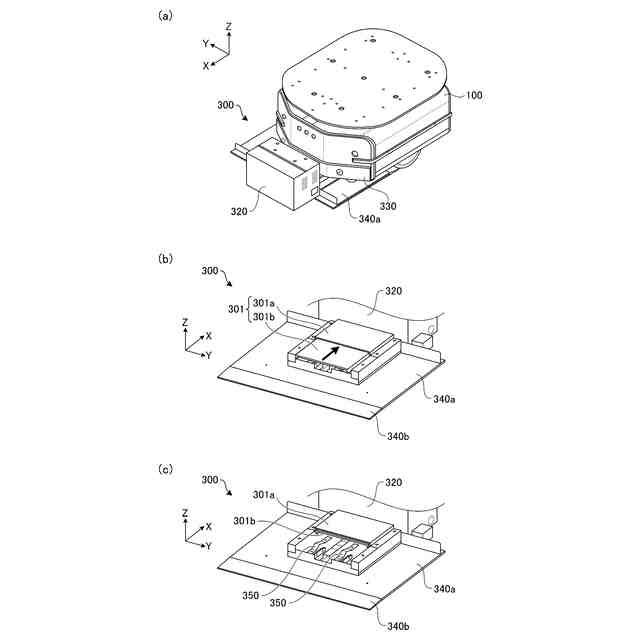
【解決手段】移動用バッテリによる駆動で移動可能に構成され、バッテリ残量の低下時には給電装置の設置場所へ移動して給電装置から供給される電力によって移動用バッテリを充電する移動ロボットを、作業用バッテリによる駆動で作業を行ってバッテリ残量の低下時には受電口に受けた電力によって作業用バッテリを充電する作業ロボットを、着脱可能に搭載する台部と、台部に搭載された作業ロボットの受電口と電気接続可能に設けられた給電口と、給電装置から電力の供給を受けているときに給電口から受電口に電力を給電して作業用バッテリを充電させる充電制御部とによって構成する。
【選択図】図2
特許請求の範囲
【請求項1】
移動用バッテリによる駆動で移動可能に構成され、バッテリ残量の低下時には給電装置の設置場所へ移動して前記給電装置から供給される電力によって前記移動用バッテリを充電する移動ロボットであって、
作業用バッテリによる駆動で作業を行ってバッテリ残量の低下時には受電口に受けた電力によって前記作業用バッテリを充電する作業ロボットを、着脱可能に搭載する台部と、
前記台部に搭載された作業ロボットの受電口と電気接続可能に設けられた給電口と、
前記給電装置から電力の供給を受けているときに前記給電口から前記受電口に電力を給電して前記作業用バッテリを充電させる充電制御部と
を備えることを特徴とする移動ロボット。
続きを表示(約 1,100 文字)
【請求項2】
前記充電制御部は、前記給電装置から供給される電力を前記給電口から前記受電口に給電して前記作業用バッテリを充電させることを特徴とする請求項1に記載の移動ロボット。
【請求項3】
前記充電制御部は、前記給電装置から供給される電力によって前記移動用バッテリを充電して、前記移動用バッテリから得られる電力を前記給電口から前記受電口に給電して前記作業用バッテリを充電させることを特徴とする請求項1に記載の移動ロボット。
【請求項4】
前記給電装置から供給される電力によって、前記移動用バッテリと前記作業用バッテリとが同時に充電されることを特徴とする請求項1に記載の移動ロボット。
【請求項5】
前記給電装置から供給される電力によって、前記移動用バッテリと前記作業用バッテリのいずれか一方が充電されて、該充電の完了後に他方が充電されることを特徴とする請求項1に記載の移動ロボット。
【請求項6】
前記給電装置から電力が供給されていないときに、前記充電制御部は、前記移動用バッテリから得られた電力を前記給電口から前記受電口に給電して前記作業用バッテリを充電させることを特徴とする請求項1に記載の移動ロボット。
【請求項7】
前記給電装置から電力が供給されていないときに、前記充電制御部は、前記給電口及び前記受電口を介して前記作業用バッテリから電力を得て前記移動用バッテリを充電することを特徴とする請求項1に記載の移動ロボット。
【請求項8】
前記移動用バッテリ及び前記作業用バッテリの充電要否を示す充電状態を検出する充電状態検出部
をさらに備え、
前記充電制御部は、前記充電状態検出部による検出結果に基づいて、前記移動用バッテリの充電及び前記作業用バッテリの充電を制御する
ことを特徴とする請求項1に記載の移動ロボット。
【請求項9】
移動用バッテリによる駆動で移動可能に構成され、前記移動用バッテリの残量低下時には給電装置の設置場所へ移動して前記給電装置から供給される電力によって前記移動用バッテリを充電する移動ロボットと、
前記移動ロボットに着脱可能に搭載されて前記移動ロボットと共に移動しながら作業用バッテリによる駆動で作業を行い、前記作業用バッテリの残量低下時には前記移動ロボットから給電される電力によって前記作業用バッテリを充電する作業ロボットと
を含み、
前記移動ロボットは、前記給電装置から電力の供給を受けているときに前記作業ロボットに電力を給電して前記作業用バッテリを充電させる
ことを特徴とするロボットシステム。
発明の詳細な説明
【技術分野】
【0001】
本開示は、複数種類の作業ロボットを搭載可能な移動ロボット及び該移動ロボットを含むロボットシステムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来、物品や作業ロボットを載せて移動可能な移動ロボットが様々な場所で利用されている。例えば、無人搬送車と呼ばれるAGV(Automatic Guided Vehicle)、自律走行移動ロボットと呼ばれるAMR(Autonomous Mobile Robot)等の車両型の移動ロボットが知られている。工場内で部品置き場から作業場まで部品を運ぶ作業、倉庫内で物品を移動する作業等が移動ロボットを利用して行われている。
【0003】
移動ロボットはバッテリによる駆動で走行する。移動ロボットのバッテリには、充電して繰り返し利用可能な二次電池が用いられる。例えば、特許文献1には、作業ロボットを取付可能な移動ロボットである無人搬送台車が開示されている。二次電池から電力を得て走行する無人搬送台車は、給電装置の設置場所まで走行して、給電装置から供給される電力によって二次電池を充電する。充電を終えた無人搬送台車は、給電装置から離れて、作業ロボットの作業場所へ移動する。無人搬送台車は、二次電池から得られる直流電圧24V又は48Vの出力を、作業ロボットが必要とする三相交流200Vに変換して出力することができる。これにより、作業ロボットは、無人搬送台車の二次電池から電力を得て作業を行うことができる。また、無人搬送台車は、作業ロボットの作業場所に設けられた給電装置の出力を三相交流200Vに変換して作業ロボットに給電することができる。作業ロボットは、無人搬送台車を介して、給電装置から得た電力で作業を行うことができる。
【先行技術文献】
【特許文献】
【0004】
特許第6779484号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術では、作業ロボットの種類に応じた移動ロボットを準備する必要がある。例えば、作業ロボットが必要とする電源電圧や消費電力に応じて、二次電池の容量を変更した移動ロボットや、出力電圧を変更した移動ロボットを準備する必要がある。作業ロボットの種類毎に移動ロボットを準備するとシステム構築に係るコストも高くなる。このため、複数種類の作業ロボットに対応可能な汎用性の高い移動ロボットの登場が望まれていた。
【0006】
本開示は、上記従来の課題に鑑みてなされたもので、その目的の1つは、汎用性の高い移動ロボット及び概移動ロボットを含むロボットシステムを提供することにある。
【課題を解決するための手段】
【0007】
本開示に係る移動ロボットは、移動用バッテリによる駆動で移動可能に構成され、バッテリ残量の低下時には給電装置の設置場所へ移動して前記給電装置から供給される電力によって前記移動用バッテリを充電する移動ロボットであって、作業用バッテリによる駆動で作業を行ってバッテリ残量の低下時には受電口に受けた電力によって前記作業用バッテリを充電する作業ロボットを、着脱可能に搭載する台部と、前記台部に搭載された作業ロボットの受電口と電気接続可能に設けられた給電口と、前記給電装置から電力の供給を受けているときに前記給電口から前記受電口に電力を給電して前記作業用バッテリを充電させる充電制御部とを備える。
【0008】
上記構成において、前記充電制御部は、前記給電装置から供給される電力を前記給電口から前記受電口に給電して前記作業用バッテリを充電させてもよい。
【0009】
上記構成において、前記充電制御部は、前記給電装置から供給される電力によって前記移動用バッテリを充電して、前記移動用バッテリから得られる電力を前記給電口から前記受電口に給電して前記作業用バッテリを充電させてもよい。
【0010】
上記構成において、前記給電装置から供給される電力によって、前記移動用バッテリと前記作業用バッテリとが同時に充電されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
4か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
3か月前
個人
スロットルトリガー
4か月前
日東精工株式会社
搬送装置
8か月前
株式会社エビス
連結具
14日前
中国電力株式会社
腰袋
7か月前
太陽工業株式会社
チャック装置
3か月前
コクヨ株式会社
補助器具
3か月前
株式会社右川ゴム製造所
把持装置
8か月前
日東工器株式会社
衝撃工具
6か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
日東工器株式会社
動力工具
4か月前
川崎重工業株式会社
ロボット
28日前
個人
メンテナンス用スタンド
5か月前
株式会社マキタ
動力工具
7か月前
東京計器株式会社
接触検知装置
4か月前
株式会社マキタ
打撃工具
1か月前
トヨタ自動車株式会社
ロボット
4か月前
株式会社マキタ
電動工具
21日前
学校法人立命館
グリッパ
3か月前
川崎重工業株式会社
罫書用治具
6か月前
株式会社マキタ
打撃工具
21日前
CKD株式会社
把持装置
4か月前
オムロン株式会社
電動把持工具
3か月前
株式会社ハーモ
開閉チャック装置
5か月前
株式会社ダイヘン
制御装置
1か月前
トヨタ自動車株式会社
ハンド構造
6か月前
株式会社マキタ
電動ハンマ
2か月前
株式会社ダイヘン
搬送装置
1か月前
個人
容器引っ掛け棒およびその使用方法
5か月前
株式会社エビス
携帯付属物取付具
1か月前
株式会社ダイヘン
搬送装置
2か月前
株式会社ダイヘン
搬送装置
7か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ


































