TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024155212
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023069696
出願日
2023-04-21
発明の名称
車両制御装置及び車両制御方法
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G08G
1/16 20060101AFI20241024BHJP(信号)
要約
【課題】第2の物標が、第1の物標と自車両との間の通過を試みたときに、第2の物標が自車両に異常接近してしまう状況を防止する。
【解決手段】自車両の前後一定距離範囲内かつ自車両の側方に存在する第1の物標に関する情報である第1物標検出情報と、第2の物標に関する情報である第2物標検出情報とを取得する検出情報取得部11と、第1物標検出情報と第2物標検出情報とに基づいて、自車両と第1の物標との間を第2の物標が通過する可能性があるか否かを判定する通過可能性判定部14とを備え、車両制御装置4は、通過可能性判定部14によって第2の物標が通過する可能性があると判定されれば、第2の物標が自車両と第1の物標との間を通過する際の自車両と第1の物標との間の自車両の車幅方向の距離である隙間距離が、隙間距離についての基準距離よりも広がるように、自車両の走行予定の経路である目標経路を更新する目標経路更新部15を備えている。
【選択図】図1
特許請求の範囲
【請求項1】
自車両の前後一定距離範囲内かつ自車両の側方に存在する第1の物標に関する情報である第1物標検出情報と、第2の物標に関する情報である第2物標検出情報とを取得する検出情報取得部と、
前記検出情報取得部により取得された、前記第1物標検出情報と前記第2物標検出情報とに基づいて、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があるか否かを判定する通過可能性判定部と、
前記通過可能性判定部によって前記第2の物標が通過する可能性があると判定されれば、前記第2の物標が自車両と前記第1の物標との間を通過する際の自車両と前記第1の物標との間の自車両の車幅方向の距離である隙間距離が、前記隙間距離についての基準距離よりも広がるように、自車両の走行予定の経路である目標経路を更新する目標経路更新部と
を備えた車両制御装置。
続きを表示(約 1,800 文字)
【請求項2】
前記第1の物標が自車両と異なる車線に存在しており、
前記検出情報取得部は、
前記第1の物標を検出する第1の物標検出センサから前記第1物標検出情報を取得し、前記第2の物標を検出する第2の物標検出センサから前記第2物標検出情報を取得し、前記第1の物標が存在している車線の両側の区画線のうち、自車両が走行している車線側の区画線を検出する区画線検出センサから、前記車線側の区画線に関する情報である区画線検出情報を取得し、
前記通過可能性判定部は、
前記第1物標検出情報と前記第2物標検出情報と前記区画線検出情報とに基づいて、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があるか否かを判定することを特徴とする請求項1記載の車両制御装置。
【請求項3】
前記通過可能性判定部は、
前記第1物標検出情報と前記区画線検出情報とに基づいて、前記第1の物標と前記車線側の区画線との間の自車両の車幅方向の距離である物標区画線間距離を算出し、前記第1の物標と前記車線側の区画線との間の、自車両の車幅方向の距離についての第1の基準距離よりも前記物標区画線間距離が短ければ、前記第2物標検出情報に基づいて、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があるか否かを判定することを特徴とする請求項2記載の車両制御装置。
【請求項4】
前記第1物標検出情報と前記区画線検出情報とに基づいて、前記物標区画線間距離を算出する距離算出部を備え、
前記通過可能性判定部は、
前記物標区画線間距離を算出する代わりに、前記距離算出部により算出された物標区画線間距離を取得することを特徴とする請求項3記載の車両制御装置。
【請求項5】
前記第1物標検出情報に基づいて、自車両と前記第1の物標との間の自車両の車幅方向の距離である自車両物標間距離を算出し、自車両と前記第1の物標との接近が許容される接近許容距離よりも前記自車両物標間距離が短いか否かを判定する接近判定部を備え、
前記目標経路更新部は、
前記接近判定部によって前記接近許容距離よりも前記自車両物標間距離が短いと判定されれば、前記自車両物標間距離が前記接近許容距離以上になるように、前記目標経路を更新することを特徴とする請求項3記載の車両制御装置。
【請求項6】
前記通過可能性判定部は、
前記第1の基準距離よりも長い第2の基準距離よりも前記物標区画線間距離が長ければ、前記第2物標検出情報に基づいて、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があるか否かをさらに判定することを特徴とする請求項3記載の車両制御装置。
【請求項7】
前記通過可能性判定部は、
前記第2物標検出情報に基づいて、前記第2の物標の幅を特定し、前記隙間距離が前記第2の物標の幅よりも長ければ、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があると判定することを特徴とする請求項1記載の車両制御装置。
【請求項8】
前記通過可能性判定部は、
前記第2物標検出情報に基づいて、自車両と前記第2の物標との相対速度を特定し、前記相対速度が自車両に近づく方向の速度であれば、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があると判定することを特徴とする請求項1記載の車両制御装置。
【請求項9】
前記通過可能性判定部は、
前記第2物標検出情報に基づいて、前記第2の物標が走行している車線を特定し、前記第2の物標が走行している車線が、自車両が走行している車線と同じ車線、又は、前記第1の物標が存在している車線と同じ車線であれば、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があると判定することを特徴とする請求項1記載の車両制御装置。
【請求項10】
前記通過可能性判定部は、
前記第1物標検出情報に基づいて、自車両と前記第1の物標との相対速度を特定し、前記相対速度が自車両に近づく方向の速度である場合に限り、自車両と前記第1の物標との間を前記第2の物標が通過する可能性があるか否か判定することを特徴とする請求項1記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、車両制御装置及び車両制御方法に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自車両の走行経路が目標経路に沿うように、自車両を制御する車両制御装置がある。
このような車両制御装置として、例えば、特許文献1には、設定部と検出部と制御部とを備える車両制御装置が開示されている。
当該設定部は、自車両の周囲に存在している物標と自車両との接近が許容される接近許容距離として、自車両の車幅方向の距離を設定する。物標としては、例えば、駐車車両、停車車両、並走車両、対向車両、又は、車両以外の物体がある。当該検出部は、自車両の周囲に存在している物標を検出する。当該制御部は、検出部により検出された物標と自車両との車幅方向の距離が、設定部により設定された接近許容距離よりも短ければ、自車両が物標から離れるように、自車両を車幅方向に移動させるオフセット制御を実行する。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/058465号
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている車両制御装置では、検出部により検出された物標(以下「第1の物標」という)と自車両との車幅方向の距離が、設定部により設定された接近許容距離よりも短くなければ、自車両が物標から離れるように、自車両を車幅方向に移動させることができないという課題があった。この結果、第1の物標と異なる他の物標(以下「第2の物標」という)が、第1の物標と自車両との間の通過を試みたときに、第2の物標が自車両に異常接近してしまうことがある。
【0005】
本開示は、上記のような課題を解決するためになされたもので、第2の物標が、第1の物標と自車両との間の通過を試みたときに、第2の物標が自車両に異常接近してしまう状況の発生を防止することができる車両制御装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る車両制御装置は、自車両の前後一定距離範囲内かつ自車両の側方に存在する第1の物標に関する情報である第1物標検出情報と、第2の物標に関する情報である第2物標検出情報とを取得する検出情報取得部と、検出情報取得部により取得された、第1物標検出情報と第2物標検出情報とに基づいて、自車両と第1の物標との間を第2の物標が通過する可能性があるか否かを判定する通過可能性判定部とを備えている。また、車両制御装置は、通過可能性判定部によって第2の物標が通過する可能性があると判定されれば、第2の物標が自車両と第1の物標との間を通過する際の自車両と第1の物標との間の自車両の車幅方向の距離である隙間距離が、隙間距離についての基準距離よりも広がるように、自車両の走行予定の経路である目標経路を更新する目標経路更新部を備えている。
【発明の効果】
【0007】
本開示によれば、第2の物標が自車両に異常接近してしまう状況の発生を防止することができる。
【図面の簡単な説明】
【0008】
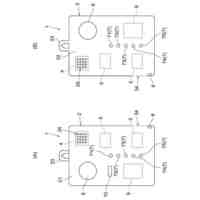
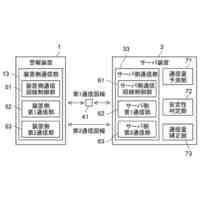
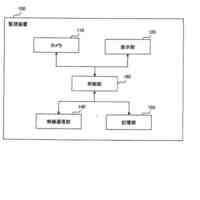
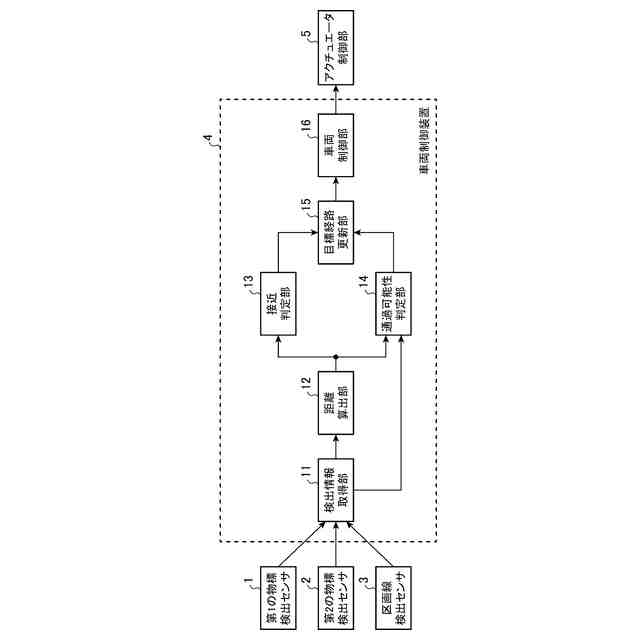
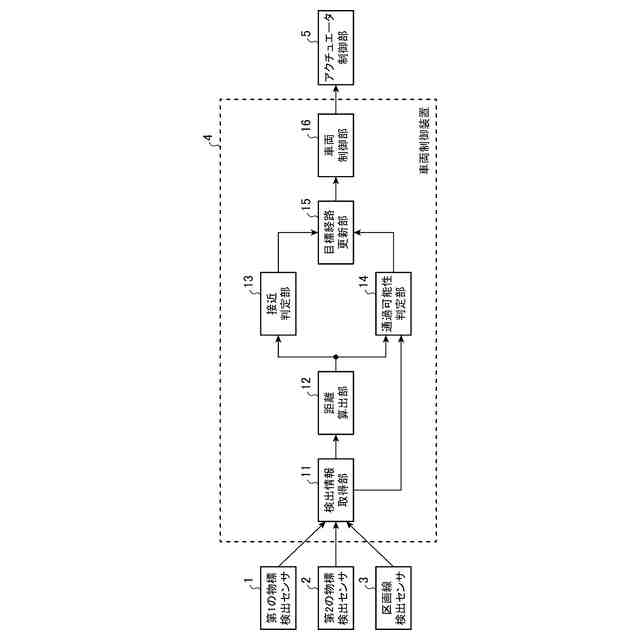
実施の形態1に係る車両制御装置4を示す構成図である。
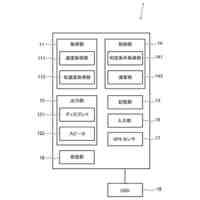
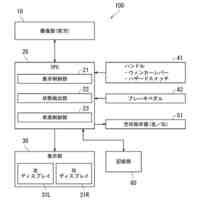
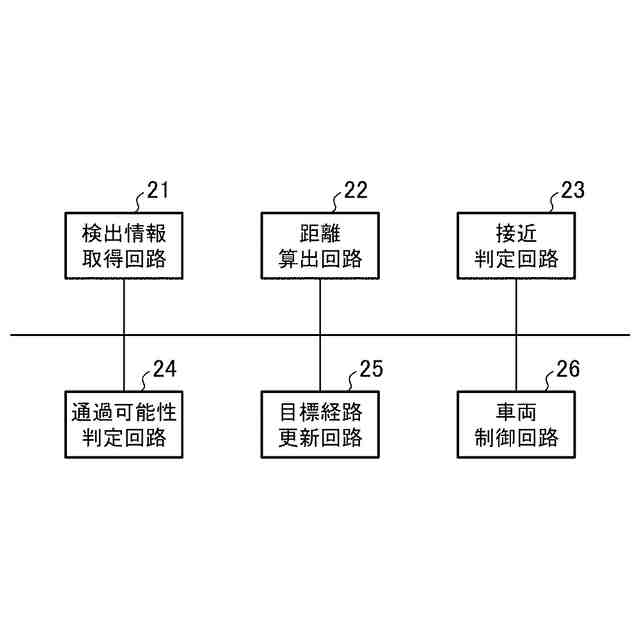
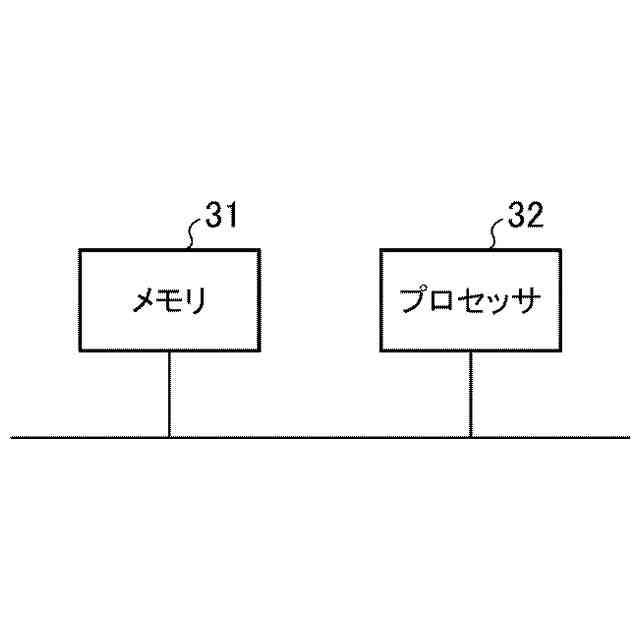
実施の形態1に係る車両制御装置4のハードウェアを示すハードウェア構成図である。
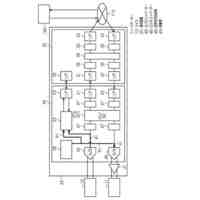
車両制御装置4が、ソフトウェア又はファームウェア等によって実現される場合のコンピュータのハードウェア構成図である。
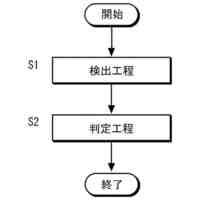
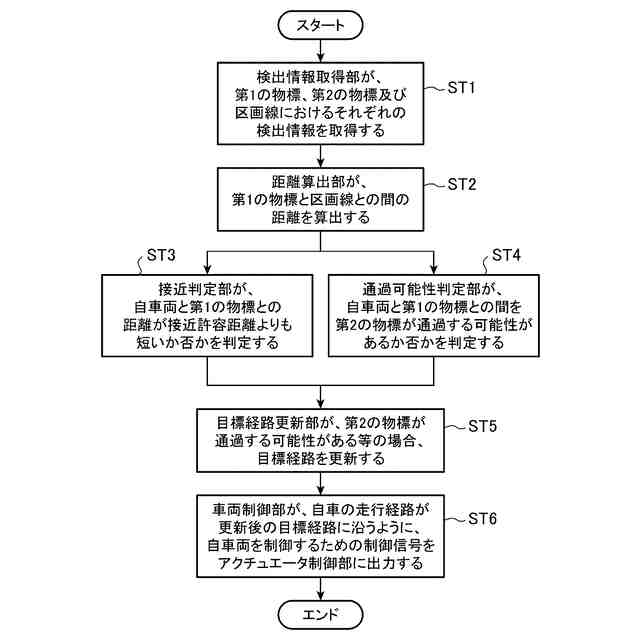
車両制御装置4の処理手順である車両制御方法を示すフローチャートである。
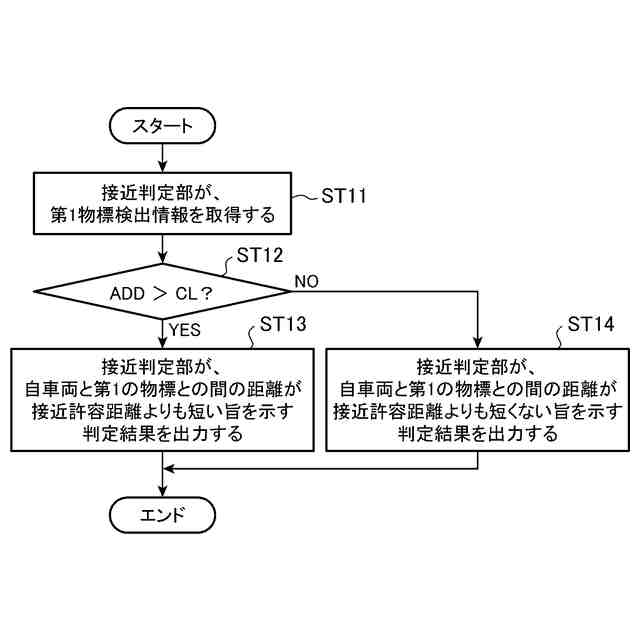
接近判定部13の処理手順を示すフローチャートである。
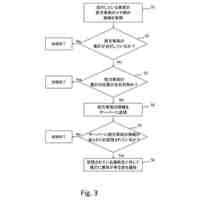
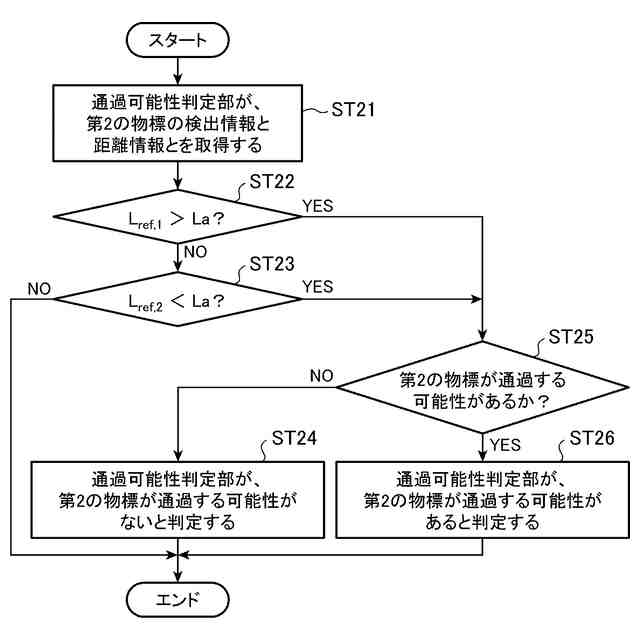
通過可能性判定部14の処理手順を示すフローチャートである。
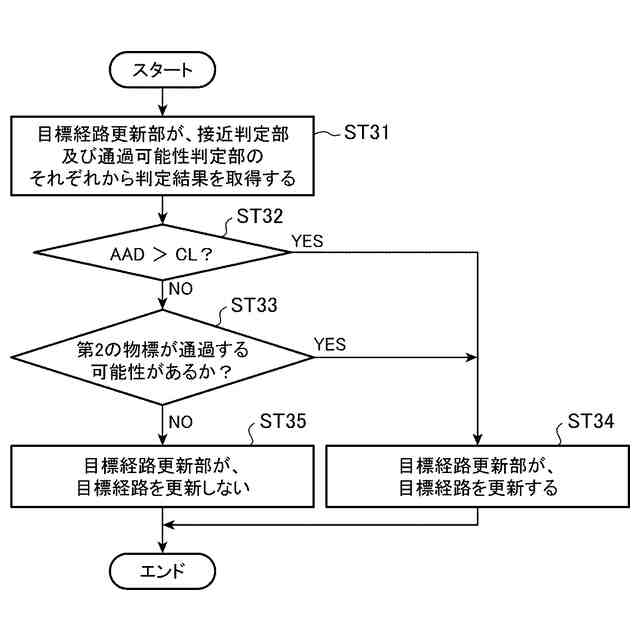
目標経路更新部15の処理手順を示すフローチャートである。
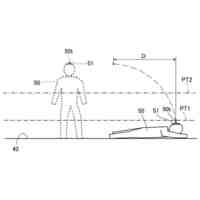
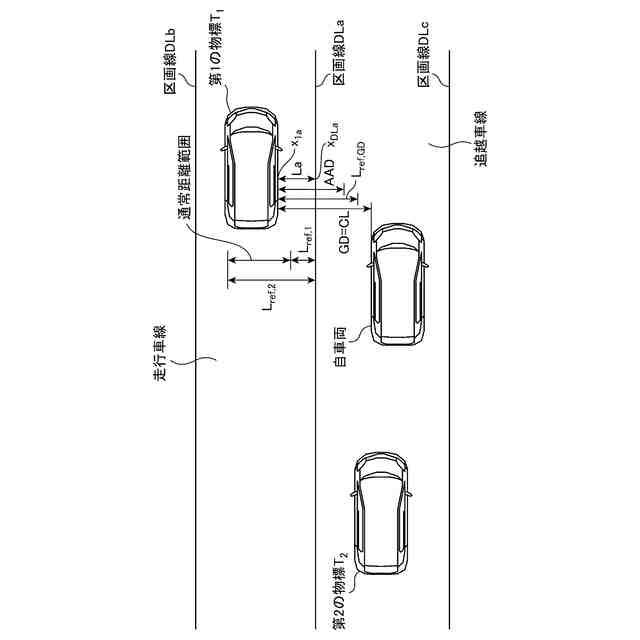
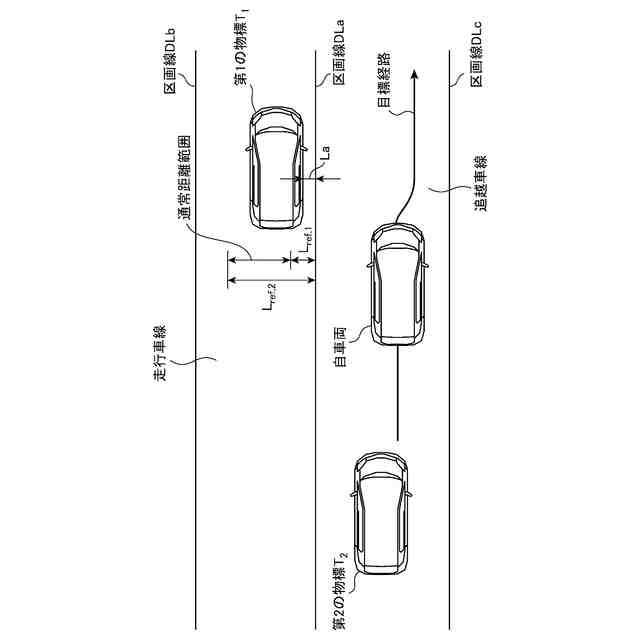
自車両、第1の物標及び第2の物標の一例を示す説明図である。
自車両、第1の物標及び第2の物標の一例を示す説明図である。
自車両、第1の物標及び第2の物標の一例を示す説明図である。
自車両、第1の物標及び第2の物標の一例を示す説明図である。
自車両、第1の物標及び第2の物標の一例を示す説明図である。
実施の形態2に係る車両制御装置4を示す構成図である。
実施の形態2に係る車両制御装置4のハードウェアを示すハードウェア構成図である。
自車両及び第2の物標の一例を示す説明図である。
実施の形態3に係る車両制御装置4を示す構成図である。
実施の形態3に係る車両制御装置4のハードウェアを示すハードウェア構成図である。
【発明を実施するための形態】
【0009】
以下、本開示をより詳細に説明するために、本開示を実施するための形態について、添付の図面に従って説明する。
【0010】
実施の形態1.
図1は、実施の形態1に係る車両制御装置4を示す構成図である。
図2は、実施の形態1に係る車両制御装置4のハードウェアを示すハードウェア構成図である。
図1において、第1の物標検出センサ1は、例えば、カメラ、又は、レーダによって実現される。
第1の物標検出センサ1は、自車両の前後一定距離範囲内かつ自車両の側方に存在する第1の物標T
1
の検出処理を行う。第1の物標T
1
は、例えば、駐車車両、停車車両、並走車両、対向車両、又は、車両以外の物体である。自車両の前後一定距離範囲は、例えば、自車両の前方〇〇メートルから、自車両の後方△△メートルの範囲である。ただし、これは一例に過ぎず、自車両の後方をゼロメートルとして、自車両の後方については、自車両の前後一定距離範囲に含まれていなくてもよい。
第1の物標検出センサ1は、第1の物標T
1
に関する情報である第1物標検出情報を車両制御装置4に出力する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
火器使用警報装置
2か月前
ニッタン株式会社
煙感知器
28日前
大阪瓦斯株式会社
警報装置
2か月前
株式会社SUBARU
車載装置
2か月前
株式会社大林組
誘導装置
2か月前
能美防災株式会社
表示灯カバー
22日前
ニッタン株式会社
発信機
2か月前
ホーチキ株式会社
通報システム
3か月前
アズビル株式会社
測定システム
1か月前
株式会社小糸製作所
転倒検知装置
3か月前
ニッタン株式会社
煙感知器
2か月前
京セラ株式会社
案内システム及び案内方法
1か月前
大阪瓦斯株式会社
音声出力システム
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
能美防災株式会社
非常放送システム
23日前
株式会社ブリッツ
車両情報処理装置
2か月前
株式会社SUBARU
運転支援装置
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
綜合警備保障株式会社
警備システム
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
大阪瓦斯株式会社
音声出力システム
2か月前
日本無線株式会社
人物探索システム
1か月前
日本信号株式会社
情報提供システム
1か月前
ニッタン株式会社
火災感知端末
2か月前
トヨタ自動車株式会社
通信装置
3か月前
ニッタン株式会社
火災感知端末
2か月前
個人
安全に飛び乗りが可能な低速自動運転車
1か月前
株式会社CCT
監視装置及び監視方法
2か月前
シャープ株式会社
表示装置
8日前
トヨタ自動車株式会社
運転支援システム
28日前
株式会社F2Fグループ
疲労度判定方法
1か月前
株式会社ユピテル
システムおよびプログラム等
2か月前
トヨタ車体株式会社
運転支援装置
2か月前
京セラ株式会社
表示システム
1か月前
トヨタ自動車株式会社
運転支援装置
29日前
日本信号株式会社
遠隔監視システム
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ