TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024147186
公報種別
公開特許公報(A)
公開日
2024-10-16
出願番号
2023060044
出願日
2023-04-03
発明の名称
動作プログラム生成装置および動作プログラム生成方法
出願人
川崎重工業株式会社
代理人
個人
,
個人
主分類
B25J
9/22 20060101AFI20241008BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットシステムの動作プログラムを、消費電力量の観点から適切かつ高精度に生成することが可能な動作プログラム生成装置を提供する。
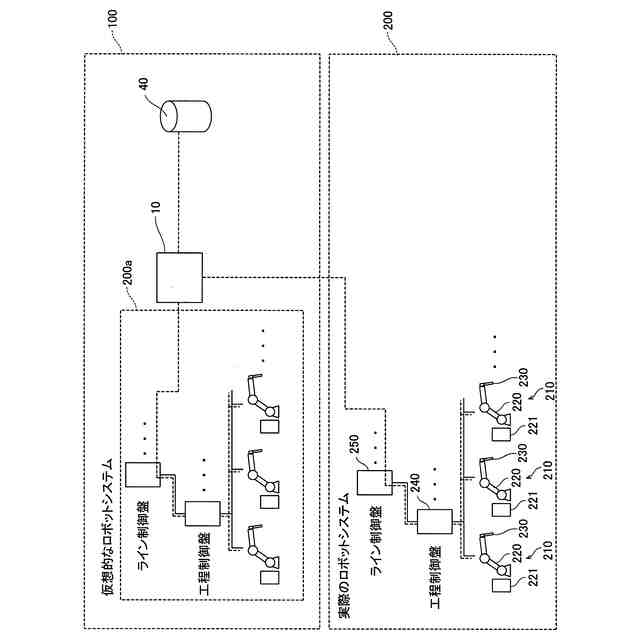
【解決手段】この動作プログラム生成装置100は、ロボットシステム200の動作に関する情報の入力を受け付ける入力部20と、入力された動作に関する情報に基づいて仮の動作プログラムを生成する動作プログラム生成部11と、生成された仮の動作プログラムに従って仮想的に動作させた際のロボットシステム200の消費電力量をシミュレーションする消費電力量算出部14と、を備える。入力部20は、消費電力量のシミュレーションの結果に基づくロボットシステム200の動作に関する情報の修正の入力を受け付ける。動作プログラム生成部11は、修正された情報に基づいて、実際の動作プログラムを生成する。
【選択図】図3
特許請求の範囲
【請求項1】
ロボットを含む構成機器を複数有するロボットシステムの動作に関する情報の入力を受け付ける入力部と、
入力された動作に関する情報に基づいて仮の動作プログラムを生成する動作プログラム生成部と、
生成された前記仮の動作プログラムに従って前記複数の構成機器を仮想的に動作させた際の前記ロボットシステムの消費電力量をシミュレーションする消費電力量算出部と、を備え、
前記入力部は、消費電力量のシミュレーションの結果に基づく前記ロボットシステムの動作に関する情報の修正の入力を受け付け、
前記動作プログラム生成部は、修正された前記ロボットシステムの動作に関する情報に基づいて、実際の動作プログラムを生成する、動作プログラム生成装置。
続きを表示(約 1,300 文字)
【請求項2】
前記動作プログラム生成部は、前記仮の動作プログラムとして、前記構成機器を仮想的に動作させる際の前記構成機器の動作軌跡を生成し、
前記生成された動作軌跡の領域ごとに、前記消費電力量を重視する動作と、前記構成機器の精度を重視する動作と、前記構成機器の動作速度を重視する動作と、のうちのいずれの動作を実行させるかの選択を受け付ける動作選択部を備える、請求項1に記載の動作プログラム生成装置。
【請求項3】
前記消費電力量算出部は、領域ごとに重視する動作が選択された前記動作軌跡に従って前記複数の構成機器を動作させた際の前記ロボットシステムの消費電力量をシミュレーションする、請求項2に記載の動作プログラム生成装置。
【請求項4】
前記入力部は、前記ロボットシステムの動作に関する情報として、前記複数の構成機器のうちの少なくとも1つの構成機器のインターロックの情報の入力を受け付け、
前記消費電力量算出部は、インターロックされる前記構成機器を含む前記ロボットシステムの消費電力量をシミュレーションする、請求項1に記載の動作プログラム生成装置。
【請求項5】
前記入力部は、前記ロボットシステムの動作に関する情報として、前記構成機器の動作時と待機時との情報の入力を受け付け、
前記消費電力量算出部は、動作状態の前記構成機器と待機状態の前記構成機器とを含む前記ロボットシステムの消費電力量をシミュレーションする、請求項1に記載の動作プログラム生成装置。
【請求項6】
前記入力部は、前記ロボットシステムの動作に関する情報として、前記構成機器に対する電源の遮断の情報の入力を受け付け、
前記消費電力量算出部は、前記電源の遮断されている前記構成機器を含む前記ロボットシステムの消費電力量をシミュレーションする、請求項1に記載の動作プログラム生成装置。
【請求項7】
前記消費電力量算出部は、前記構成機器の回生エネルギの差分を含めて前記ロボットシステムの消費電力量をシミュレーションする、請求項1に記載の動作プログラム生成装置。
【請求項8】
前記消費電力量算出部は、前記構成機器の回生エネルギの差分を含めた前記構成機器の消費電力量を時系列でシミュレーションする、請求項7に記載の動作プログラム生成装置。
【請求項9】
前記動作プログラム生成部により生成された前記実際の動作プログラムが記憶される記憶部を備える、請求項1に記載の動作プログラム生成装置。
【請求項10】
生成された前記実際の動作プログラムを、前記ロボットシステムに出力する動作プログラム出力部と、
前記動作プログラム出力部から出力された前記実際の動作プログラムに従って、前記複数の構成機器を実際に動作させた際の実際の消費電力量と、シミュレーションによって算出された消費電力量と、の誤差を算出する誤差算出部と、を備える、請求項1に記載の動作プログラム生成装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
この開示は、動作プログラム生成装置および動作プログラム生成方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
従来、ロボットの動作プログラムの生成装置が開示されている。たとえば、特許文献1には、1台のロボットの動作プログラムを修正するプログラム修正装置が開示されている。特許文献1のプログラム修正装置は、動作プログラムに基づいてシミュレーションを実行するシミュレーション部と、シミュレーションを繰り返しながら、あらかじめ定められた評価基準を満たすように動作プログラムを修正するプログラム修正部と、を備える。具体的には、評価基準を満たすように、動作プログラムにおいて、教示点における指令速度および指令加速度が修正される。特許文献1のプログラム修正装置では、評価基準として、たとえば、消費電力が設定される。
【先行技術文献】
【特許文献】
【0003】
特許第5890477号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、特許文献1のプログラム修正装置では、消費電力が所望の消費電力を満たすように、1台のロボットに対する動作プログラムが修正されている。しかしながら、製造業やサービス分野などにおいて、複数台のロボットが協調動作するシステムや、ロボットと加工軸とが協調動作するロボットシステムが導入されている。そこで、ロボットシステムの動作プログラムを、消費電力の観点から適切かつ高精度に生成することが望まれている。
【0005】
この開示は、上記のような課題を解決するためになされたものであり、この開示の1つの目的は、ロボットシステムの動作プログラムを、消費電力量の観点から適切かつ高精度に生成することが可能な動作プログラム生成装置および動作プログラム生成方法を提供することである。
【課題を解決するための手段】
【0006】
この開示の第1の局面による動作プログラム生成装置は、ロボットを含む構成機器を複数有するロボットシステムの動作に関する情報の入力を受け付ける入力部と、入力された動作に関する情報に基づいて仮の動作プログラムを生成する動作プログラム生成部と、生成された仮の動作プログラムに従って複数の構成機器を仮想的に動作させた際のロボットシステムの消費電力量をシミュレーションする消費電力量算出部と、を備え、入力部は、消費電力量のシミュレーションの結果に基づくロボットシステムの動作に関する情報の修正の入力を受け付け、動作プログラム生成部は、修正されたロボットシステムの動作に関する情報に基づいて、実際の動作プログラムを生成する。
【0007】
この開示の第1の局面による動作プログラム生成装置は、上記のように、生成された仮の動作プログラムに従って複数の構成機器を仮想的に動作させた際のロボットシステムの消費電力量をシミュレーションする消費電力量算出部を備える。これにより、ロボットシステムの仮の動作プログラムに基づいて、ロボットシステムの消費電力量の全体をシミュレーションすることができる。そして、入力部は、消費電力量のシミュレーションの結果に基づくロボットシステムの動作に関する情報の修正の入力を受け付け、動作プログラム生成部は、修正されたロボットシステムの動作に関する情報に基づいて、実際の動作プログラムを生成する。これにより、消費電力量のシミュレーションの結果に基づいて修正された適切かつ精度の高い実際の動作プログラムが生成される。その結果、ロボットシステムの動作プログラムを、消費電力量の観点から適切かつ高精度に生成できる。
【0008】
この開示の第2の局面による動作プログラム生成方法は、ロボットを含む構成機器を複数有するロボットシステムの動作に関する情報の入力を受け付けることと、入力された動作に関する情報に基づいて仮の動作プログラムを生成することと、生成された仮の動作プログラムに従って複数の構成機器を仮想的に動作させた際のロボットシステムの消費電力量をシミュレーションすることと、消費電力量のシミュレーションの結果に基づくロボットシステムの動作に関する情報の修正を受け付けることと、修正されたロボットシステムの動作に関する情報に基づいて、実際の動作プログラムを生成することと、を備える。
【0009】
この開示の第2の局面による動作プログラム生成方法は、上記のように、生成された仮の動作プログラムに従って複数の構成機器を仮想的に動作させた際のロボットシステムの消費電力量をシミュレーションすることを備える。これにより、ロボットシステムの仮の動作プログラムに基づいて、ロボットシステムの消費電力量の全体をシミュレーションすることができる。そして、動作プログラム生成方法は、消費電力量のシミュレーションの結果に基づくロボットシステムの動作に関する情報の修正を受け付けることと、修正されたロボットシステムの動作に関する情報に基づいて、実際の動作プログラムを生成することと、を備える。これにより、消費電力量のシミュレーションの結果に基づいて修正された適切かつ精度の高い実際の動作プログラムが生成される。その結果、ロボットシステムの動作プログラムを、消費電力量の観点から適切かつ高精度に生成することが可能な動作プログラム生成方法を提供できる。
【発明の効果】
【0010】
本開示の動作プログラム生成装置および動作プログラム生成方法は、ロボットシステムの動作プログラムを、消費電力量の観点から適切かつ高精度に生成することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
2か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
1か月前
個人
スロットルトリガー
2か月前
日東精工株式会社
搬送装置
6か月前
中国電力株式会社
腰袋
5か月前
コクヨ株式会社
補助器具
1か月前
太陽工業株式会社
チャック装置
1か月前
株式会社ツノダ
挟持工具
7か月前
日東工器株式会社
動力工具
2か月前
株式会社右川ゴム製造所
把持装置
7か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
衝撃工具
4か月前
日東工器株式会社
動力工具
2か月前
個人
メンテナンス用スタンド
3か月前
東京計器株式会社
接触検知装置
2か月前
学校法人立命館
グリッパ
2か月前
株式会社マキタ
動力工具
5か月前
トヨタ自動車株式会社
ロボット
2か月前
川崎重工業株式会社
罫書用治具
4か月前
CKD株式会社
把持装置
2か月前
オムロン株式会社
電動把持工具
1か月前
株式会社ダイヘン
搬送装置
5か月前
株式会社ダイヘン
搬送装置
5か月前
トヨタ自動車株式会社
ハンド構造
4か月前
株式会社ダイヘン
搬送装置
28日前
白山工業株式会社
ロボットアーム
2か月前
株式会社マキタ
電動ハンマ
7日前
株式会社ダイヘン
制御装置
1日前
個人
容器引っ掛け棒およびその使用方法
3か月前
個人
回転工具およびバリ取り部品
2か月前
株式会社ハーモ
開閉チャック装置
3か月前
トヨタ自動車株式会社
締付判定方法
2か月前
株式会社スター精機
把持装置
1か月前
国立大学法人山形大学
二重関節機構
5か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ