TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024143630
公報種別
公開特許公報(A)
公開日
2024-10-11
出願番号
2023056404
出願日
2023-03-30
発明の名称
アングルインパクト工具
出願人
株式会社マキタ
代理人
弁理士法人酒井国際特許事務所
主分類
B25B
21/02 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】アングルインパクト工具の出力シャフトを高トルク化すること。
【解決手段】アングルインパクト工具は、ステータと、ステータに対して第1回転軸を中心に回転するロータと、を有するブラシレスモータと、ロータにより回転される打撃機構と、打撃機構により打撃され、第2回転軸を中心に回転する出力シャフトと、ブラシレスモータを収容するモータハウジングと、バッテリパックが装着されるバッテリ装着部と、を備える。第2回転軸に直交する前後方向において、打撃機構及び出力シャフトは、ブラシレスモータよりも前方側に配置される。前後方向と出力シャフトとは直交する。出力シャフトの最大締付トルクは、500Nm以上1000Nm未満である。
【選択図】図7
特許請求の範囲
【請求項1】
ステータと、前記ステータに対して第1回転軸を中心に回転するロータと、を有するブラシレスモータと、
前記ロータにより回転される打撃機構と、
前記打撃機構により打撃され、第2回転軸を中心に回転する出力シャフトと、
前記ブラシレスモータを収容するモータハウジングと、
バッテリパックが装着されるバッテリ装着部と、を備え、
前記第2回転軸に直交する前後方向において、前記打撃機構及び前記出力シャフトは、前記ブラシレスモータよりも前方側に配置され、
前記前後方向と前記出力シャフトとは直交し、
前記出力シャフトの最大締付トルクは、500Nm以上1000Nm未満である、
アングルインパクト工具。
続きを表示(約 1,100 文字)
【請求項2】
前記バッテリパックの定格電圧は、18V以上であり、
前記ステータの外径は、50mm以上である、
請求項1に記載のアングルインパクト工具。
【請求項3】
前記ブラシレスモータの最大出力は、400W以上である、
請求項2に記載のアングルインパクト工具。
【請求項4】
前記ロータの回転を減速して前記打撃機構に伝達する減速機構を備え、
前記出力シャフトの回転数は、1000rpm以上4000rpm以下である、
請求項2に記載のアングルインパクト工具。
【請求項5】
前記打撃機構の打撃数は、1250rpm以上5000rpm以下である、
請求項2に記載のアングルインパクト工具。
【請求項6】
前記打撃機構のハンマの重量は、160g以上640g以下である、
請求項2に記載のアングルインパクト工具。
【請求項7】
前記ロータの回転数を減速して前記打撃機構に伝達する減速機構を備え、
前記減速機構の減速比は、1/18.0以上1/4.5以下である、
請求項2に記載のアングルインパクト工具。
【請求項8】
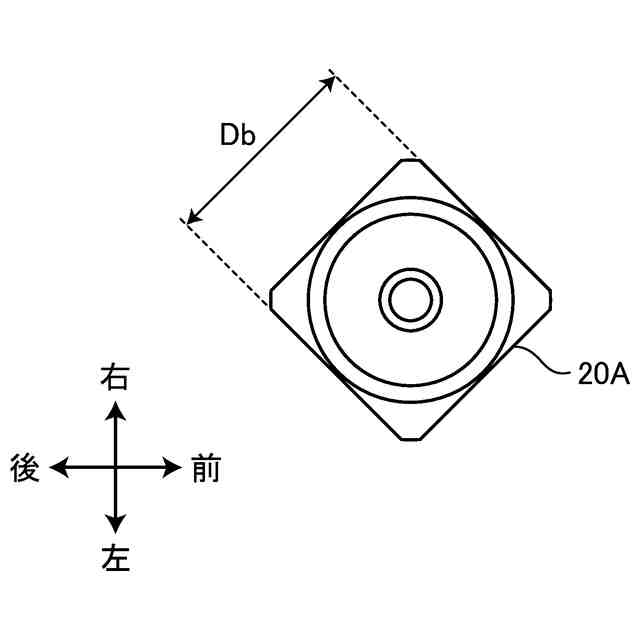
ソケットが装着される前記出力シャフトの先端部は、四角柱状であり、
相互に対向する前記出力シャフトの先端部の第1辺と第2辺との距離は、1/2インチ以上2.5インチ以下である、
請求項2に記載のアングルインパクト工具。
【請求項9】
ステータと、前記ステータに対して第1回転軸を中心に回転するロータと、を有するブラシレスモータと、
前記ロータにより回転される打撃機構と、
前記打撃機構により打撃され、第2回転軸を中心に回転する出力シャフトと、
前記ブラシレスモータを収容するモータハウジングと、
バッテリパックが装着されるバッテリ装着部と、を備え、
前記第2回転軸に直交する前後方向において、前記打撃機構及び前記出力シャフトは、前記ブラシレスモータよりも前方側に配置され、
前記前後方向と前記出力シャフトとは直交し、
前記出力シャフトの最大締付トルクは、1000Nm以上1500Nm未満である、
アングルインパクト工具。
【請求項10】
前記バッテリパックの定格電圧は、18V以上であり、
前記ステータの外径は、50mm以上である、
請求項9に記載のアングルインパクト工具。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本明細書で開示する技術は、アングルインパクト工具に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
アングルインパクト工具に係る技術分野において、特許文献1に開示されているようなアングルインパクトドライバが知られている。
【先行技術文献】
【特許文献】
【0003】
特開2014-200884号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本明細書で開示する技術は、アングルインパクト工具の出力シャフトを高トルク化することを目的とする。
【課題を解決するための手段】
【0005】
本明細書は、アングルインパクト工具を開示する。アングルインパクト工具は、ステータと、ステータに対して第1回転軸を中心に回転するロータと、を有するブラシレスモータと、ロータにより回転される打撃機構と、打撃機構により打撃され、第2回転軸を中心に回転する出力シャフトと、ブラシレスモータを収容するモータハウジングと、バッテリパックが装着されるバッテリ装着部と、を備えてもよい。第2回転軸に直交する前後方向において、打撃機構及び出力シャフトは、ブラシレスモータよりも前方側に配置されてもよい。前後方向と出力シャフトとは直交してもよい。出力シャフトの最大締付トルクは、500Nm以上1000Nm未満でもよい。
【発明の効果】
【0006】
本明細書で開示する技術によれば、アングルインパクト工具の出力シャフトが高トルク化される。
【図面の簡単な説明】
【0007】
図1は、第1実施形態に係るインパクトレンチを示す側面図である。
図2は、第1実施形態に係るインパクトレンチの一部を示す断面図である。
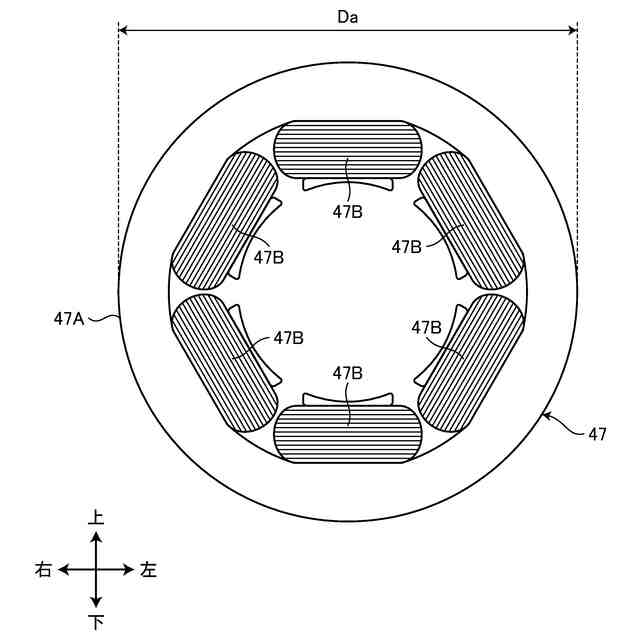
図3は、第1実施形態に係るステータを模式的に示す図である。
図4は、第1実施形態に係る出力シャフトを模式的に示す図である。
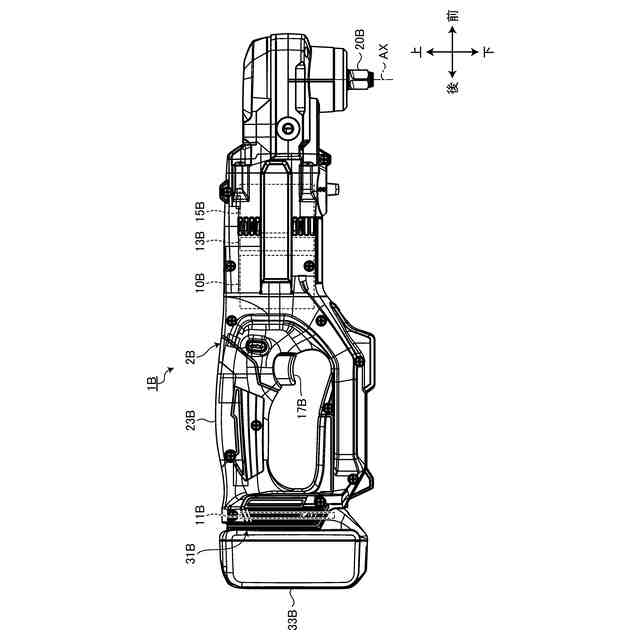
図5は、第2実施形態に係るインパクトレンチを示す側面図である。
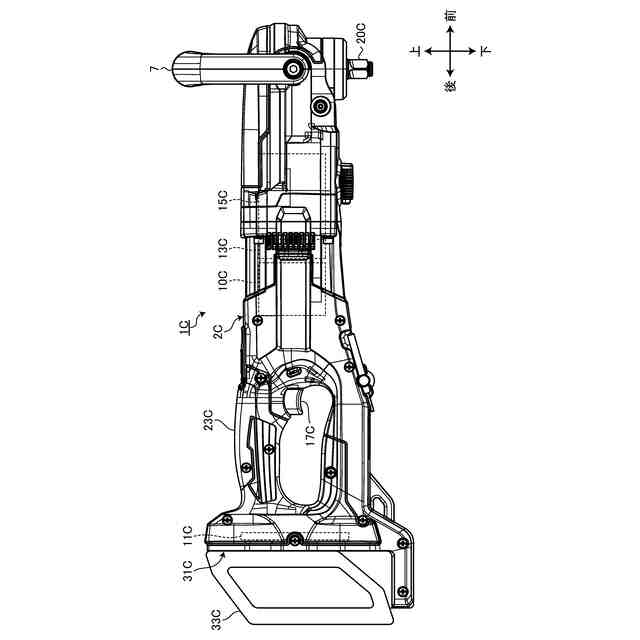
図6は、第3実施形態に係るインパクトレンチを示す側面図である。
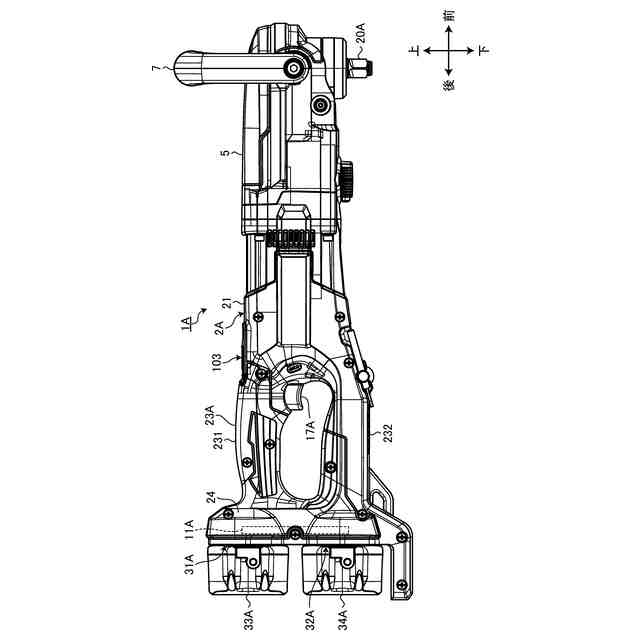
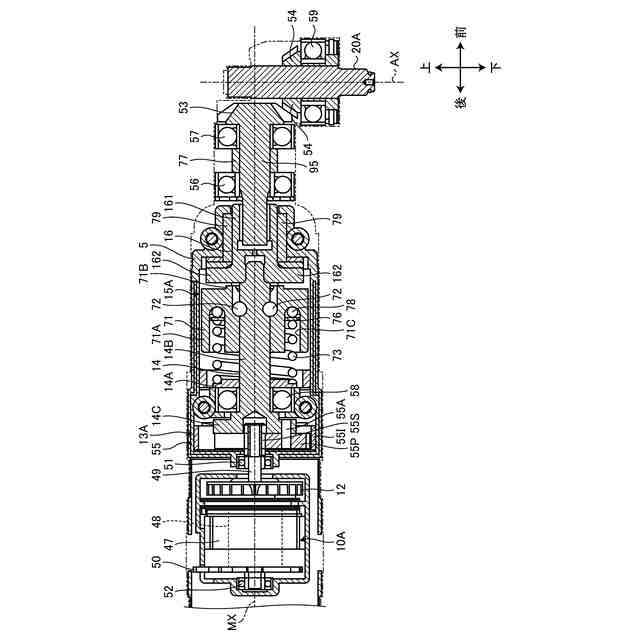
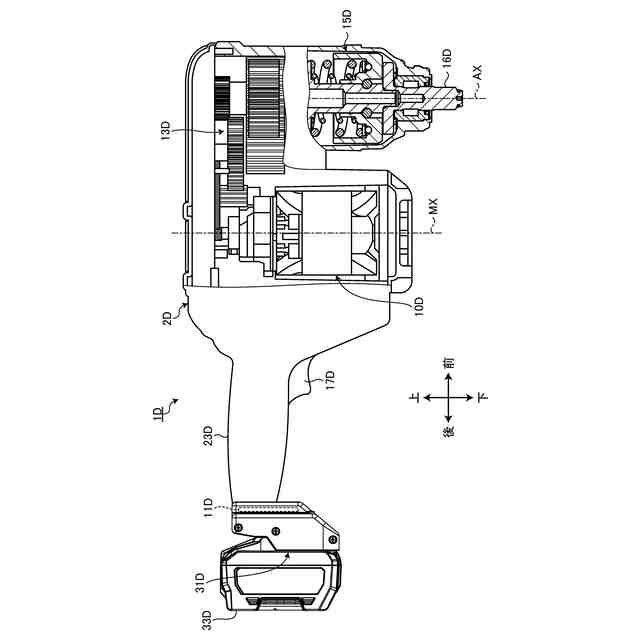
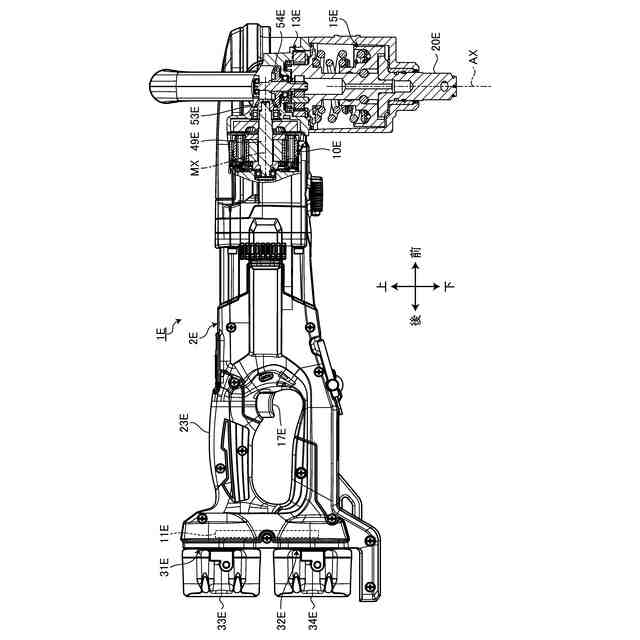
図7は、第4実施形態に係るインパクトレンチを示す側面図である。
図8は、第5実施形態に係るインパクトレンチを示す側面図である。
図9は、第6実施形態に係るインパクトレンチを模式的に示す図である。
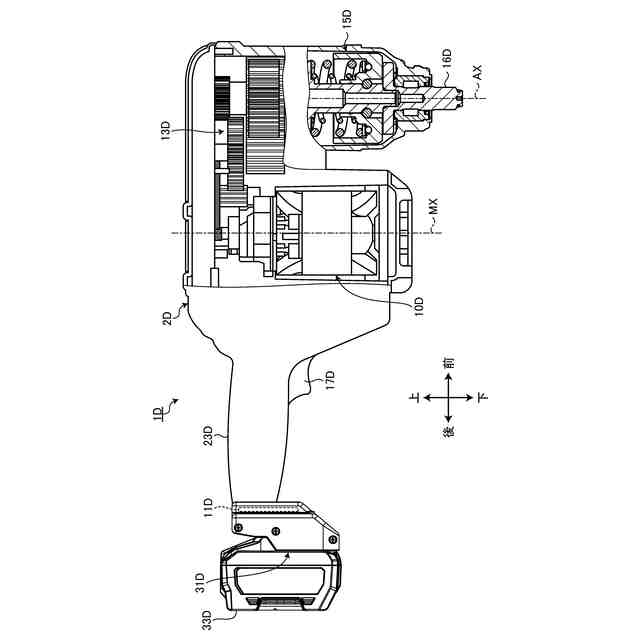
図10は、第7実施形態に係るインパクトドライバの一部を示す断面図である。
図11は、実施形態に係るバッテリパックの定格電圧及びステータコアの外径と出力シャフトの最大締付トルクとの関係を示す図である。
図12は、その他の実施形態に係るインパクトレンチを示す図である。
図13は、その他の実施形態に係るインパクトレンチを示す図である。
図14は、その他の実施形態に係るインパクトレンチを示す図である。
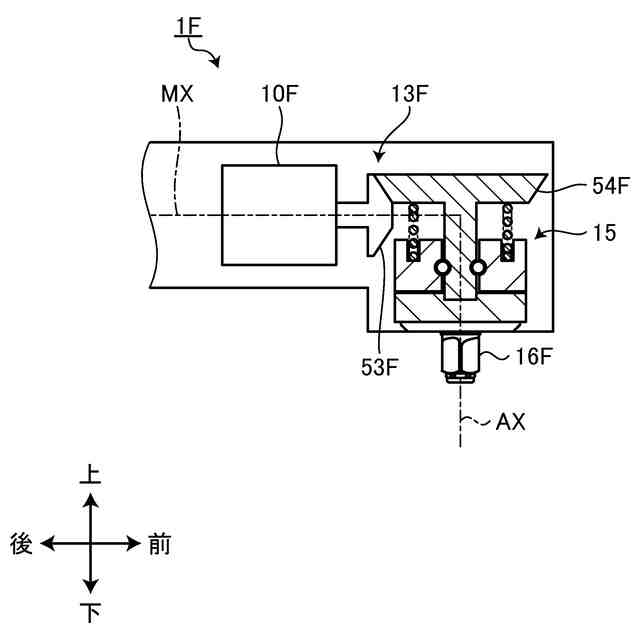
図15は、その他の実施形態に係るアングルインパクト工具の一部を模式的に示す図である。
図16は、その他の実施形態に係るモータを模式的に示す図である。
図17は、その他の実施形態に係るアングルインパクト工具の一部を示す図である。
【発明を実施するための形態】
【0008】
1つ又はそれ以上の実施形態において、アングルインパクト工具は、ステータと、ステータに対して第1回転軸を中心に回転するロータと、を有するブラシレスモータと、ロータにより回転される打撃機構と、打撃機構により打撃され、第2回転軸を中心に回転する出力シャフトと、ブラシレスモータを収容するモータハウジングと、バッテリパックが装着されるバッテリ装着部と、を備えてもよい。第2回転軸に直交する前後方向において、打撃機構及び出力シャフトは、ブラシレスモータよりも前方側に配置されてもよい。前後方向と出力シャフトとは直交してもよい。出力シャフトの最大締付トルクは、500Nm以上1000Nm未満でもよい。
【0009】
上記の構成では、アングルインパクト工具の出力シャフトが高トルク化される。なお、最大締め付けトルクとは、被締結材を締め付けたときのトルクであり、一般的に締結後の被締結材に対して、増し締めトルクレンチ等で測定されるトルクのことをいう。なお、ナットやボルトを緩めて測定する方法ではない。一般的にこの最大締め付けトルクはそれぞれの製造メーカのカタログに記載される。
【0010】
1つ又はそれ以上の実施形態において、バッテリパックの定格電圧は、18V以上でもよい。ステータの外径は、50mm以上でもよい。ブラシレスモータの最大出力は、400W以上でもよい。出力シャフトの回転数は、1000rpm以上4000rpm以下でもよい。打撃機構の打撃数は、1250rpm以上5000rpm以下でもよい。打撃機構のハンマの重量は、160g以上640g以下でもよい。減速機構の減速比は、/18.0以上1/4.5以下でもよい。相互に対向する出力シャフトの先端部の第1辺と第2辺との距離は、1/2インチ以上2.5インチ以下でもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社マキタ
電動工具
10日前
個人
木製ハンマー
3か月前
個人
関節モジュール
2か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
衝撃工具
5か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
個人
メンテナンス用スタンド
4か月前
株式会社マキタ
打撃工具
16日前
東京計器株式会社
接触検知装置
3か月前
CKD株式会社
把持装置
3か月前
川崎重工業株式会社
罫書用治具
5か月前
株式会社マキタ
動力工具
6か月前
学校法人立命館
グリッパ
2か月前
オムロン株式会社
電動把持工具
2か月前
トヨタ自動車株式会社
ロボット
3か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
搬送装置
6か月前
株式会社ダイヘン
制御装置
24日前
株式会社ハーモ
開閉チャック装置
4か月前
株式会社ダイヘン
搬送装置
1か月前
個人
容器引っ掛け棒およびその使用方法
4か月前
トヨタ自動車株式会社
ハンド構造
5か月前
株式会社マキタ
電動ハンマ
1か月前
個人
回転工具およびバリ取り部品
3か月前
株式会社ダイヘン
搬送装置
16日前
白山工業株式会社
ロボットアーム
3か月前
株式会社エビス
携帯付属物取付具
16日前
株式会社日本キャリア工業
ロボットハンド
4か月前
国立大学法人山形大学
二重関節機構
6か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ


































