TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024140628
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023051861
出願日
2023-03-28
発明の名称
情報処理装置、情報処理方法及びプログラム
出願人
KDDI株式会社
代理人
弁理士法人創光国際特許事務所
,
個人
,
個人
,
個人
主分類
B25J
13/00 20060101AFI20241003BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】移動型ロボットの周囲に存在する人が感じる煩わしさを低減させる。
【解決手段】情報処理装置2は、移動型ロボットの周囲に存在する人が撮像された撮像画像を取得する取得部231と、移動型ロボットが移動する移動ルート上に存在する人である対象者に対して移動を促す音声を出力するために制御する制御内容であって、前記撮像画像により求められた対象者と移動ルート以外の場所に存在する人である非対象者との相対的な位置関係に基づいて決定された制御内容に基づいて、移動型ロボットを制御する送信部233と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
移動型ロボットの周囲に存在する人が撮像された撮像画像を取得する取得部と、
前記移動型ロボットが移動する移動ルート上に存在する前記人である対象者に対して移動を促す音声を出力するために制御する制御内容であって、前記撮像画像により求められた前記対象者と前記移動ルート以外の場所に存在する前記人である非対象者との相対的な位置関係に基づいて決定された前記制御内容に基づいて、前記移動型ロボットを制御するロボット制御部と、
を有する情報処理装置。
続きを表示(約 1,200 文字)
【請求項2】
前記情報処理装置は、前記対象者と前記非対象者との相対的な位置関係に基づいて、前記制御内容を決定する決定部をさらに有し、
前記ロボット制御部は、前記決定部が決定した前記制御内容を示す制御情報を前記移動型ロボットに送信することにより、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項3】
前記ロボット制御部は、前記対象者と正対する位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項4】
前記ロボット制御部は、前記非対象者よりも前記対象者の方に近い位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項5】
前記ロボット制御部は、前記非対象者と正対する位置よりも前記対象者と正対する位置に近い位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項6】
前記ロボット制御部は、前記非対象者よりも前記対象者の方に向いた前記移動型ロボットの向きが前記音声を出力するときの出力向きとして決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項7】
前記ロボット制御部は、前記位置関係に基づき、前記対象者から前記非対象者までの距離が所定の閾値を超えていると判定した場合に決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1から6のいずれか一項に記載の情報処理装置。
【請求項8】
前記ロボット制御部は、前記位置関係に基づき、前記対象者から前記非対象者までの距離が所定の閾値を超えていないと判定した場合、前記移動型ロボットが前記音声を出力しないように制御する、
請求項1から6のいずれか一項に記載の情報処理装置。
【請求項9】
前記ロボット制御部は、人の属性ごとに定められている複数の音声パターンのうち、前記対象者の属性に対応する前記音声パターンが決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項1に記載の情報処理装置。
【請求項10】
前記ロボット制御部は、前記対象者の属性及び前記非対象者の属性のうち、予め定められた人の属性の優先順位が相対的に高い人の属性に対応する前記音声パターンが決定された前記制御内容に基づいて、前記移動型ロボットを制御する、
請求項9に記載の情報処理装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、情報処理装置、情報処理方法及びプログラムに関する。
続きを表示(約 1,100 文字)
【背景技術】
【0002】
近年、自律して移動する移動型ロボットが普及しつつある。特許文献1には、移動型ロボットが移動中に人や物等の障害物を検出した場合に、当該障害物の移動を促す音声を移動型ロボットに出力させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2020-151070号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
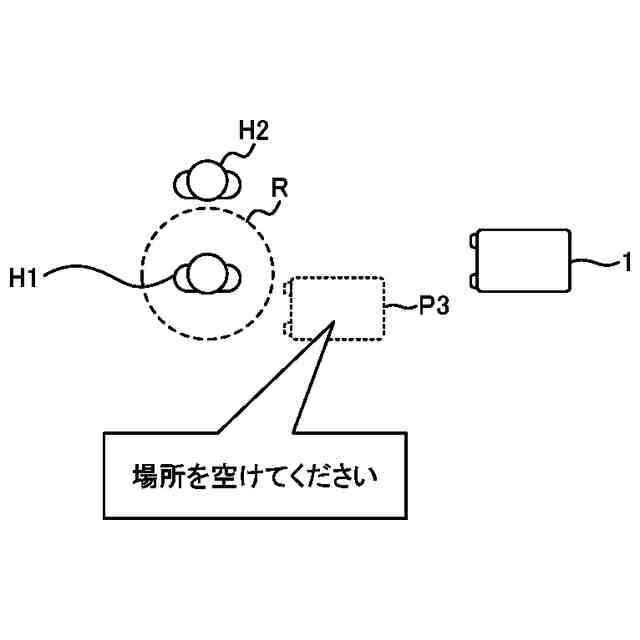
しかしながら、従来の技術においては、移動型ロボットの周囲に複数の人が存在する場合、移動型ロボットが音声を出力しても、誰を移動させたいのかわかりづらく、移動型ロボットの周囲に存在する人にとって移動型ロボットによって出力される音声が煩わしく感じる場合があった。
【0005】
そこで、本発明はこれらの点に鑑みてなされたものであり、移動型ロボットの周囲に存在する人が感じる煩わしさを低減させることを目的とする。
【課題を解決するための手段】
【0006】
本発明の第1の態様にかかる情報処理装置は、移動型ロボットの周囲に存在する人が撮像された撮像画像を取得する取得部と、前記移動型ロボットが移動する移動ルート上に存在する前記人である対象者に対して移動を促す音声を出力するために制御する制御内容であって、前記撮像画像により求められた前記対象者と前記移動ルート以外の場所に存在する前記人である非対象者との相対的な位置関係に基づいて決定された前記制御内容に基づいて、前記移動型ロボットを制御するロボット制御部と、を有する。
【0007】
前記情報処理装置は、前記対象者と前記非対象者との相対的な位置関係に基づいて、前記制御内容を決定する決定部をさらに有してもよいし、前記ロボット制御部は、前記決定部が決定した前記制御内容を示す制御情報を前記移動型ロボットに送信することにより、前記移動型ロボットを制御してもよい。
【0008】
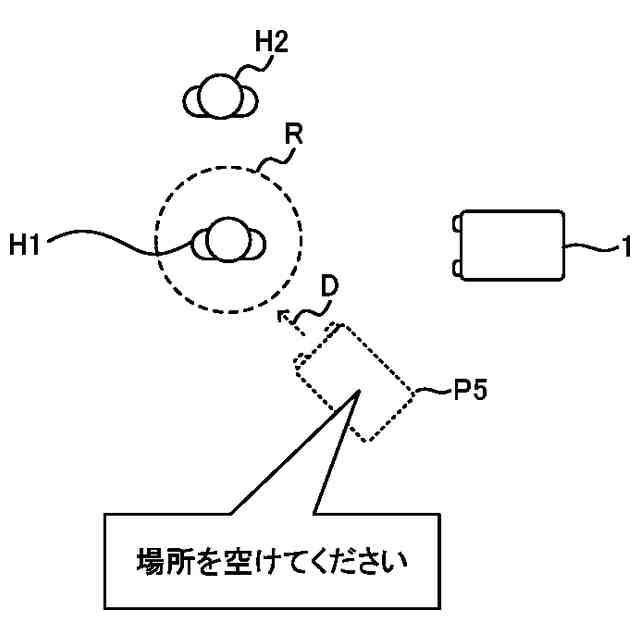
前記ロボット制御部は、前記対象者と正対する位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御してもよい。
【0009】
前記ロボット制御部は、前記非対象者よりも前記対象者の方に近い位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御してもよい。
【0010】
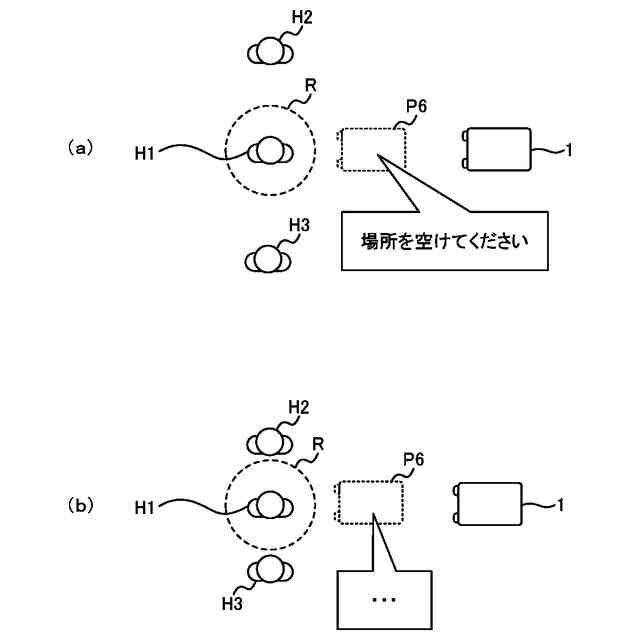
前記ロボット制御部は、前記非対象者と正対する位置よりも前記対象者と正対する位置に近い位置が前記音声を出力させる出力位置として決定された前記制御内容に基づいて、前記移動型ロボットを制御してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
木製ハンマー
2か月前
個人
関節モジュール
1か月前
個人
寸切りボルト回し
1か月前
個人
スロットルトリガー
2か月前
日東精工株式会社
搬送装置
6か月前
中国電力株式会社
腰袋
5か月前
太陽工業株式会社
チャック装置
1か月前
コクヨ株式会社
補助器具
1か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
衝撃工具
4か月前
日東工器株式会社
動力工具
2か月前
日東工器株式会社
動力工具
2か月前
個人
メンテナンス用スタンド
3か月前
CKD株式会社
把持装置
2か月前
川崎重工業株式会社
罫書用治具
4か月前
東京計器株式会社
接触検知装置
2か月前
オムロン株式会社
電動把持工具
1か月前
トヨタ自動車株式会社
ロボット
2か月前
学校法人立命館
グリッパ
1か月前
株式会社マキタ
動力工具
5か月前
個人
回転工具およびバリ取り部品
2か月前
株式会社ダイヘン
搬送装置
5か月前
株式会社ハーモ
開閉チャック装置
3か月前
株式会社ダイヘン
搬送装置
5か月前
トヨタ自動車株式会社
ハンド構造
4か月前
個人
容器引っ掛け棒およびその使用方法
3か月前
白山工業株式会社
ロボットアーム
2か月前
株式会社マキタ
電動ハンマ
今日
株式会社ダイヘン
搬送装置
21日前
CKD株式会社
電動把持装置
5か月前
国立大学法人佐賀大学
協働システム
2か月前
トヨタ自動車株式会社
締付判定方法
2か月前
川崎重工業株式会社
ロボット
1か月前
国立大学法人山形大学
二重関節機構
5か月前
株式会社日本キャリア工業
ロボットハンド
3か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ