TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024139309
公報種別
公開特許公報(A)
公開日
2024-10-09
出願番号
2023050188
出願日
2023-03-27
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人武和国際特許事務所
主分類
E02F
9/24 20060101AFI20241002BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械を制御するコントローラの制御負担を軽くすること。
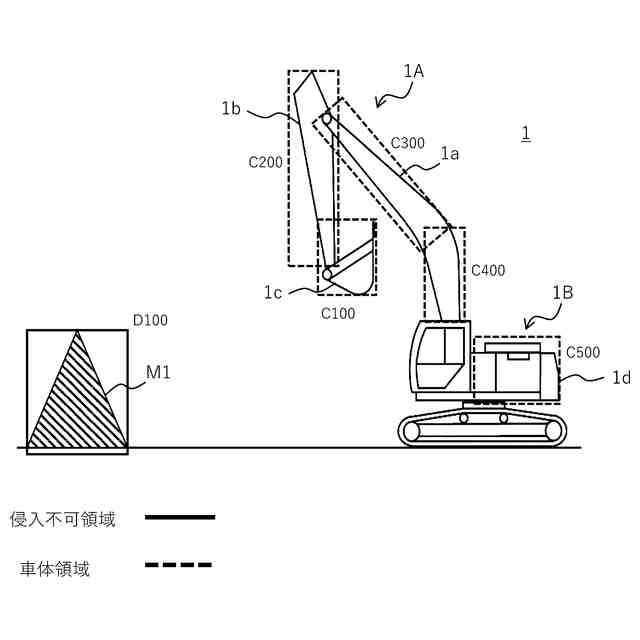
【解決手段】本発明に係る作業機械(1)は、旋回体(1d)及びフロント作業機(1A)を備えた機体と、操作装置と、を備え、機体の周囲の障害物の情報と、フロント作業機の姿勢情報と、操作装置の操作入力とに基づき、機体の動作を制御するコントローラ(100)を備える。コントローラは、姿勢情報に基づいて、作業機械の少なくとも一部を第1の直方体形状で囲んだ領域を所定の座標上に車体領域として設定し、取得した障害物を第2の直方体形状で囲んだ領域を所定の座標上に侵入不可領域として設定し、操作装置の操作入力から車体領域の軌道を予測し、車体領域が所定の座標上において侵入不可領域と接触すると予測された場合に、作業機械が侵入不可領域に侵入しないように少なくとも旋回体またはフロント作業機の動作を制御する。
【選択図】図3
特許請求の範囲
【請求項1】
旋回体及び前記旋回体の前部に取り付けられたフロント作業機を備えた機体と、前記フロント作業機の姿勢を検出する姿勢センサと、前記フロント作業機を操作する操作装置と、を備えた作業機械であって、前記機体の周囲の障害物の情報を取得する外界センサもしくは、予め前記機体の周囲の障害物の情報を記憶した記憶装置から取得した前記障害物の情報と、前記姿勢センサにて検出された前記フロント作業機の姿勢情報と、前記操作装置の操作入力とに基づき、前記機体の動作を制御するコントローラを備えた作業機械において、
前記コントローラは、
前記姿勢情報に基づいて、前記作業機械の少なくとも一部を第1の直方体形状で囲んだ領域を所定の座標上に車体領域として設定し、
前記外界センサもしくは前記記憶装置から取得した前記障害物を第2の直方体形状で囲んだ領域を前記所定の座標上に侵入不可領域として設定し、
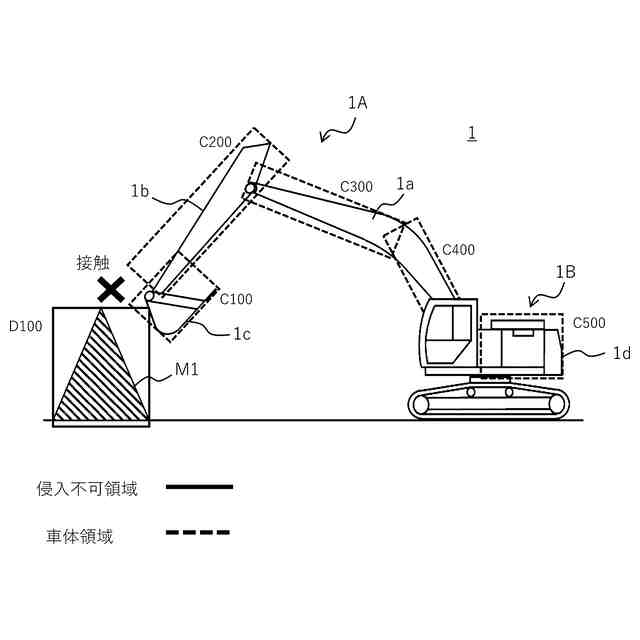
前記操作装置の操作入力から前記車体領域の軌道を予測し、前記車体領域が前記所定の座標上において前記侵入不可領域と接触すると予測された場合に、前記作業機械が前記侵入不可領域に侵入しないように少なくとも前記旋回体または前記フロント作業機の動作を制御する、
ことを特徴とする作業機械。
続きを表示(約 630 文字)
【請求項2】
請求項1に記載の作業機械において、
前記作業機械のグローバル座標上における位置情報を取得するGPS装置を備え、
前記コントローラは、前記GPS装置により取得した前記作業機械の前記位置情報に基づいて、前記所定の座標としての前記グローバル座標上に前記車体領域及び前記侵入不可領域を設定する、
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記コントローラは、外部装置またはオペレータから入力される3Dデータ、あるいは前記作業機械に設けられた前記外界センサにて検出された外界データを、前記障害物の情報として取得する、
ことを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記コントローラは、前記外部装置との通信により、前記車体領域及び前記侵入不可領域を更新する、
ことを特徴とする作業機械。
【請求項5】
請求項1に記載の作業機械において、
前記コントローラは、前記フロント作業機の種類に応じて前記車体領域を設定する、
ことを特徴とする作業機械。
【請求項6】
請求項1に記載の作業機械において、
前記コントローラは、前記操作装置の操作入力に基づいて作業内容を判定し、前記作業内容に応じて前記車体領域を設定する、
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
作業機械の稼働時の不慮の接触を低減するために、作業機械の動作を制御する制御装置が知られている。例えば、特許文献1に記載の制御装置は、作業機械の姿勢を示す状態情報、作業機械の動作を示す動作情報、及び、作業機械の周辺の物体の配置を示す周辺情報を取得する取得手段と、状態情報と動作情報とに基づいて、可動部と周辺の物体との間に設定される安全距離を特定する特定手段と、安全距離と周辺情報とに応じて、作業機械の動作を制御する動作制御手段と、を備えている。
【先行技術文献】
【特許文献】
【0003】
特開2022-076406号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1において、特定手段は、可動部の速度ベクトルの各成分に応じた各軸半径を有する楕円体を設定し、安全距離を、楕円体の半径として特定する構成である。楕円体を定義するには点群データが必要となるうえ、楕円体の演算には複雑な処理が必要となるため、高性能のコントローラが要求される。一方で、作業機械は作業中に振動が発生するため、コントローラには耐震性が求められる。高性能なコントローラを振動の激しい作業機械に搭載することは現実的ではないことから、汎用のコントローラでも処理できるよう、コントローラの制御負担を軽くすることが重要な課題である。
【0005】
本発明は、このような実状に鑑みてなされたものであり、その目的は、作業機械を制御するコントローラの制御負担を軽くすることにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明の一態様は、旋回体及び前記旋回体の前部に取り付けられたフロント作業機を備えた機体と、前記フロント作業機の姿勢を検出する姿勢センサと、前記フロント作業機を操作する操作装置と、を備えた作業機械であって、前記機体の周囲の障害物の情報を取得する外界センサもしくは、予め前記機体の周囲の障害物の情報を記憶した記憶装置から取得した前記障害物の情報と、前記姿勢センサにて検出された前記フロント作業機の姿勢情報と、前記操作装置の操作入力とに基づき、前記機体の動作を制御するコントローラを備えた作業機械において、前記コントローラは、前記姿勢情報に基づいて、前記作業機械の少なくとも一部を第1の直方体形状で囲んだ領域を所定の座標上に車体領域として設定し、前記外界センサもしくは前記記憶装置から取得した前記障害物を第2の直方体形状で囲んだ領域を前記所定の座標上に侵入不可領域として設定し、前記操作装置の操作入力から前記車体領域の軌道を予測し、前記車体領域が前記所定の座標上において前記侵入不可領域と接触すると予測された場合に、前記作業機械が前記侵入不可領域に侵入しないように少なくとも前記旋回体または前記フロント作業機の動作を制御する、ことを特徴とする。
【発明の効果】
【0007】
本発明によれば、車体領域と侵入不可領域とをそれぞれ仮想の直方体形状を用いて設定できるため、コントローラの制御負担を軽くできる。なお、上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0008】
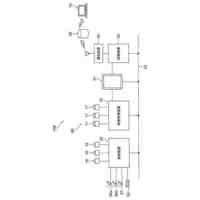
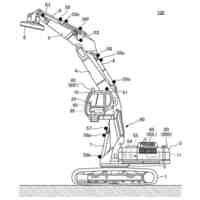
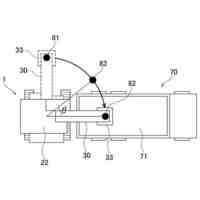
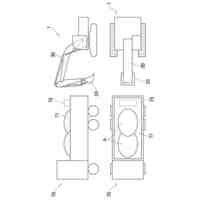
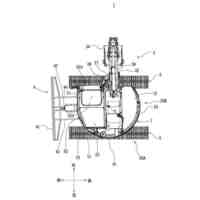
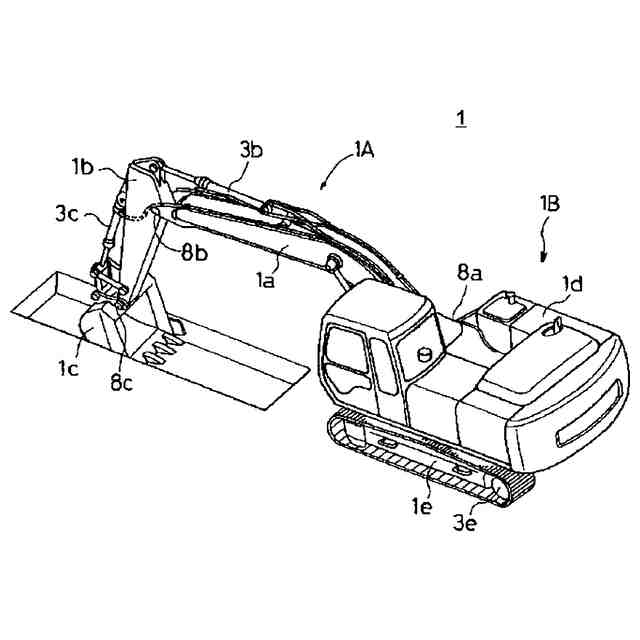
本発明の実施形態に係る油圧ショベルの外観を示す斜視図である。
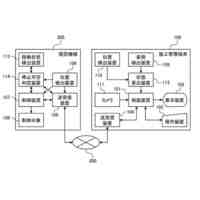
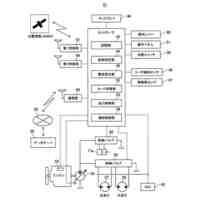
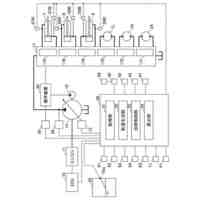
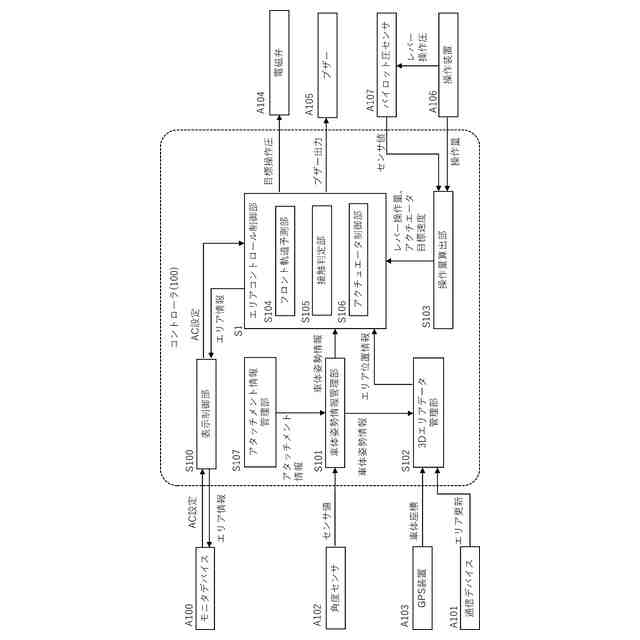
コントローラの機能ブロック図である。
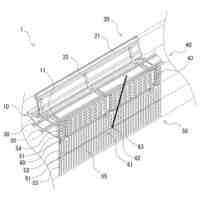
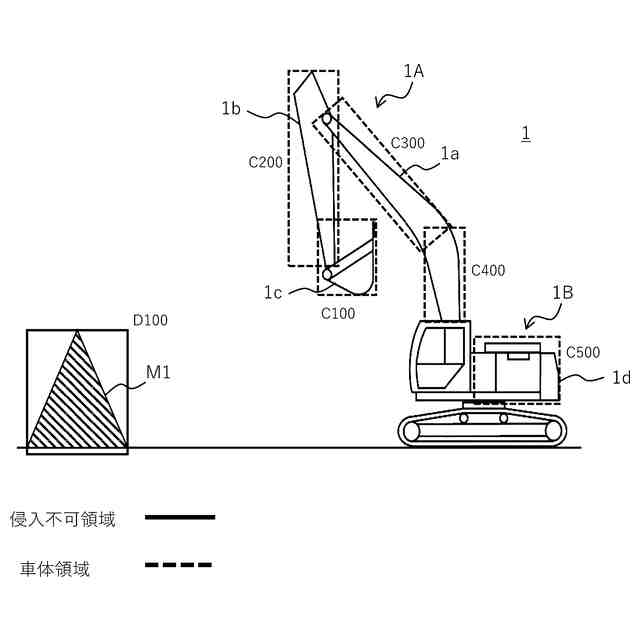
油圧ショベルと障害物とを直方体形状を用いてモデル化した図である。
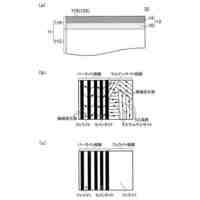
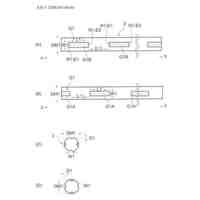
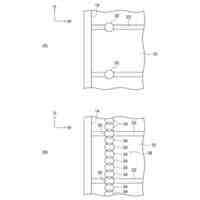
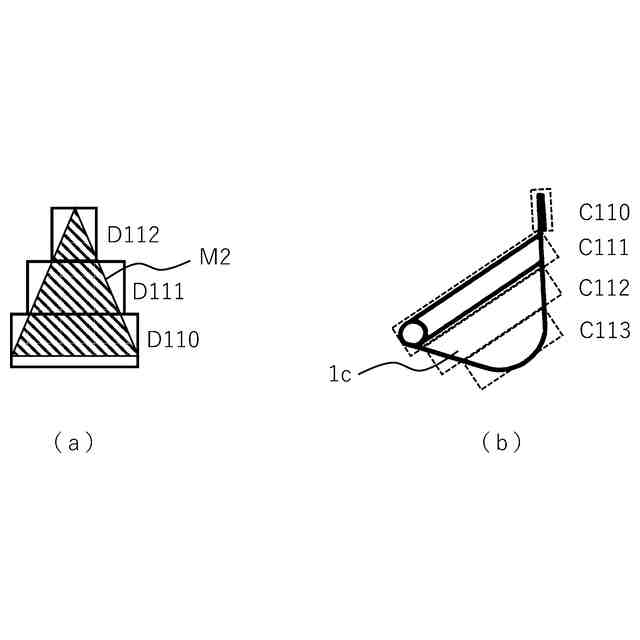
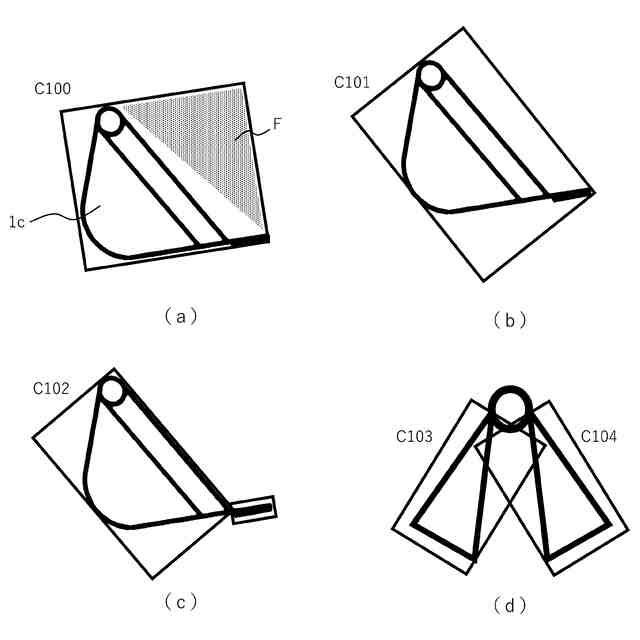
(a)障害物に対する直方体形状の設定の変形例を示す図、(b)バケットに対する直方体形状の設定の変形例を示す図である。
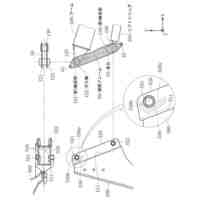
フロント作業機が障害物と接触する場合をモデル化した図である。
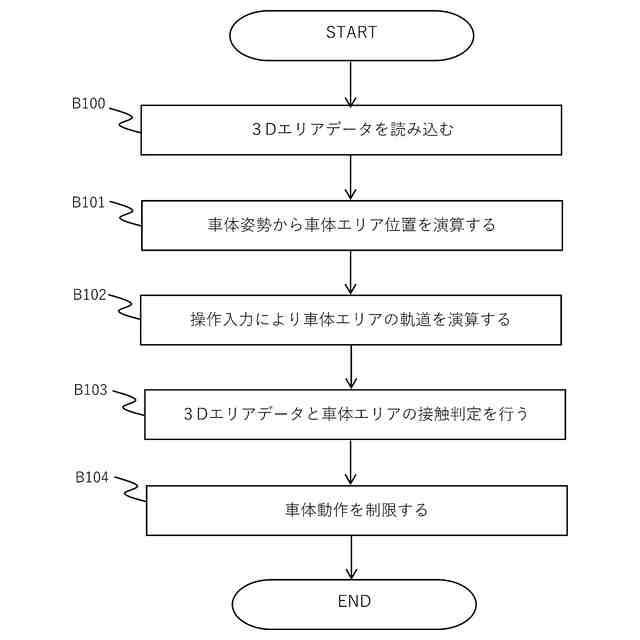
接触判定処理の手順を示すフローチャートである。
作業内容に応じた直方体形状の設定方法の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態について、図面を参照して説明する。
【0010】
図1は、本発明に係る作業機械の一例である油圧ショベルの外観を示す斜視図である。図1に示すように、油圧ショベル1は、垂直方向にそれぞれ回動するブーム1a、アーム1b、及びバケット1cからなる多関節型のフロント作業機1Aと、上部旋回体1d及び下部走行体1eからなる車体1Bとで構成され、フロント作業機1Aのブーム1aの基端は上部旋回体1dの前部に支持されている。ブーム1a、アーム1b、バケット1c、上部旋回体1d、及び下部走行体1eは、それぞれブームシリンダ3a、アームシリンダ3b、バケットシリンダ3c、旋回モータ(図示せず)、及び左右の走行モータ(左側の走行モータ3eのみ図示)によりそれぞれ駆動される被駆動部材を構成し、それらの動作は、上部旋回体1dの運転室に設けられた操作装置(A106/図2参照)により指示される。ブーム1a、アーム1b、及びバケット1cは、それぞれの角度を計測する角度センサ8a、8b、8c(A102/図2参照)を有している。なお、フロント作業機1Aは、バケット1cの代わりに、グラップル等のアタッチメントを備える場合もある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
10日前
日立建機株式会社
作業機械の稼働現場管理システム
1か月前
日立建機株式会社
窒化鋼部品及び窒化鋼部品の製造方法
2か月前
日立建機株式会社
建設機械の動作制御システム
21日前
個人
エア津波緩衝装置
23日前
個人
指示装置
22日前
鹿島建設株式会社
接合構造
29日前
株式会社クボタケミックス
桝蓋
22日前
株式会社不二越
建設機械
29日前
住友建機株式会社
ショベル
16日前
住友建機株式会社
ショベル
29日前
日本車輌製造株式会社
建設機械
1か月前
コベルコ建機株式会社
作業機械
23日前
住友重機械工業株式会社
作業機械
1か月前
個人
鋼管杭とその製造方法
22日前
住友重機械工業株式会社
作業機械
22日前
鹿島建設株式会社
建込み方法
8日前
株式会社フジタ
建築物とその施工方法
29日前
株式会社乗富鉄工所
水門開閉装置の設置方法
1か月前
日本車輌製造株式会社
杭打機の制御装置
1か月前
コベルコ建機株式会社
作業機械
22日前
コベルコ建機株式会社
作業機械
22日前
千代田工営株式会社
杭と上部構造物との接合構造
29日前
住友重機械工業株式会社
作業機械の制御装置
22日前
ジーネットワーク株式会社
低空頭FRP.Tube合成杭
17日前
株式会社不二越
建設機械用旋回ブレーキ装置
1か月前
個人
アンカーボルト支持装置
17日前
ヤンマーホールディングス株式会社
作業機械
22日前
スーパーレジンクラフト株式会社
防塵板付消波装置
16日前
日立建機株式会社
作業車両
10日前
株式会社JAST
鋼管杭撤去装置
29日前
住友重機械工業株式会社
作業機械の管理システム
1か月前
三陽機器株式会社
作業機の作業部連結構造
10日前
株式会社竹中工務店
山留め工法
22日前
カナデビア株式会社
排砂装置および排砂方法
1か月前
大成建設株式会社
整流構造
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ