TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024172570
公報種別
公開特許公報(A)
公開日
2024-12-12
出願番号
2023090364
出願日
2023-05-31
発明の名称
作業機械の制御装置
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20241205BHJP(水工;基礎;土砂の移送)
要約
【課題】作業具に積載された物の重量の計測を安定させる。
【解決手段】作業機械の制御装置は、下部走行体と、下部走行体に旋回自在の搭載される上部旋回体と、上部旋回体に取り付けられるアタッチメントと、アタッチメントの先端に設けられる作業具と、を有する作業機械を制御するように構成される制御部を、有し、制御部は、作業具に積載された積載物を所定の対象物に積込むために生成された移動軌道に従って作業具が移動している間に、積載物の重量計測を行うためにアタッチメントに所定の動作を行わせる動作指令を生成するように構成されている。
【選択図】図2
特許請求の範囲
【請求項1】
下部走行体と、前記下部走行体に旋回自在の搭載される上部旋回体と、前記上部旋回体に取り付けられるアタッチメントと、前記アタッチメントの先端に設けられる作業具と、を有する作業機械を制御するように構成される制御部を、有し、
前記制御部は、前記作業具に積載された積載物を所定の対象物に積込むために生成された移動軌道に従って前記作業具が移動している間に、前記積載物の重量計測を行うために前記アタッチメントに所定の動作を行わせる動作指令を生成するように構成されている、
作業機械の制御装置。
続きを表示(約 530 文字)
【請求項2】
前記制御部は、前記所定の動作として、前記積載物の重量計測を行っている間、前記作業具が移動している加速度を所定の加速度より小さくさせる前記動作指令を生成する、
請求項1に記載の作業機械の制御装置。
【請求項3】
前記制御部は、前記積載物の重量計測を行っている間、水平面に対する前記作業具の開口面の傾きが所定の閾値より小さくなった状態を維持するような前記移動軌道を生成する、
請求項1に記載の作業機械の制御装置。
【請求項4】
前記制御部は、前記積載物の重量計測を行っている間、前記上部旋回体の旋回動作が抑制された前記移動軌道を生成する、
請求項1に記載の作業機械の制御装置。
【請求項5】
前記制御部は、前記積載物の重量計測を行った後、操作者に前記アタッチメントの操作を受け渡し可能な前記移動軌道を生成する、
請求項1乃至4のいずれか一つに記載の作業機械の制御装置。
【請求項6】
前記制御部は、前記積載物を前記所定の対象物に積み込みが完了するまでの前記移動軌道を生成する、
請求項1乃至4のいずれか一つに記載の作業機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の制御装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来から、ショベルがダンプトラックの荷台等に、土砂などの物を積み込むために様々な技術が提案されている。
【0003】
例えば、特許文献1に記載された技術では、土砂等の積載物が必要以上に作業具に積載されないように、土砂等を掘削する際の作業具の移動軌道を設定している。これにより、特許文献1に記載された技術では、ダンプトラックの荷台に適切な重量の物を積載することを可能としている。
【先行技術文献】
【特許文献】
【0004】
国際公開第2019/189260号
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1は、掘削する土砂の量を調整するための技術であって、作業具に積載された物の重量を計測するための技術ではない。このため、作業具に積載された物の重量を計測する際に値が安定しない可能性がある。
【0006】
本発明の一態様は、作業具に積載された物の重量の計測を安定させる技術を提供する。
【課題を解決するための手段】
【0007】
本発明の一態様に係る作業機械の制御装置は、下部走行体と、下部走行体に旋回自在の搭載される上部旋回体と、上部旋回体に取り付けられるアタッチメントと、アタッチメントの先端に設けられる作業具と、を有する作業機械を制御するように構成される制御部を、有し、制御部は、作業具に積載された積載物を所定の対象物に積込むために生成された移動軌道に従って作業具が移動している間に、積載物の重量計測を行うためにアタッチメントに所定の動作を行わせる動作指令を生成するように構成されている。
【発明の効果】
【0008】
本発明の一態様によれば、作業具の積載物の重量の検出する際に所定の動作を行わせることで、重量の計測精度を安定させる。
【図面の簡単な説明】
【0009】
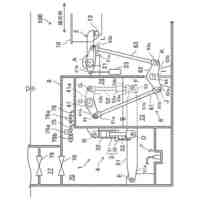
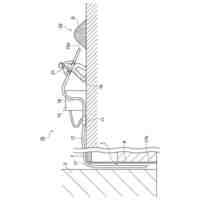
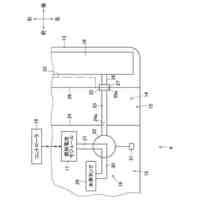
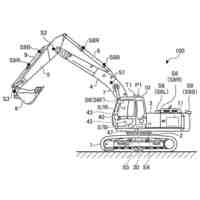
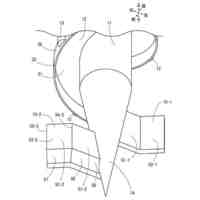
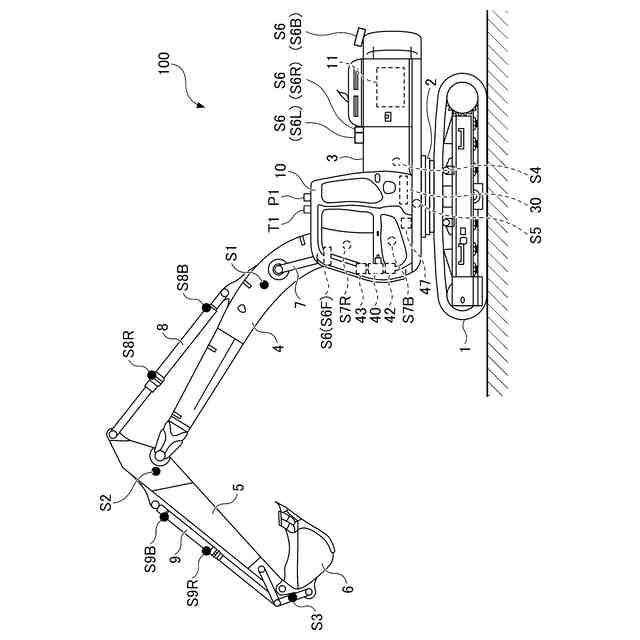
図1は、実施形態に係るショベルの側面図である。
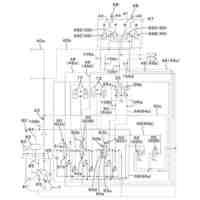
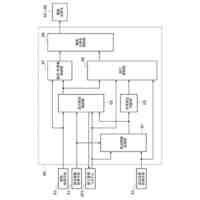
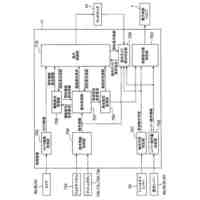
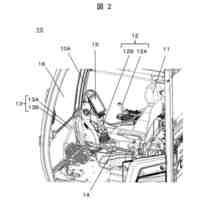
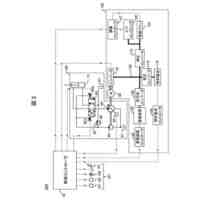
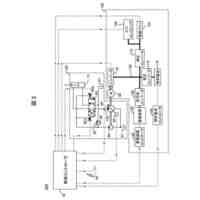
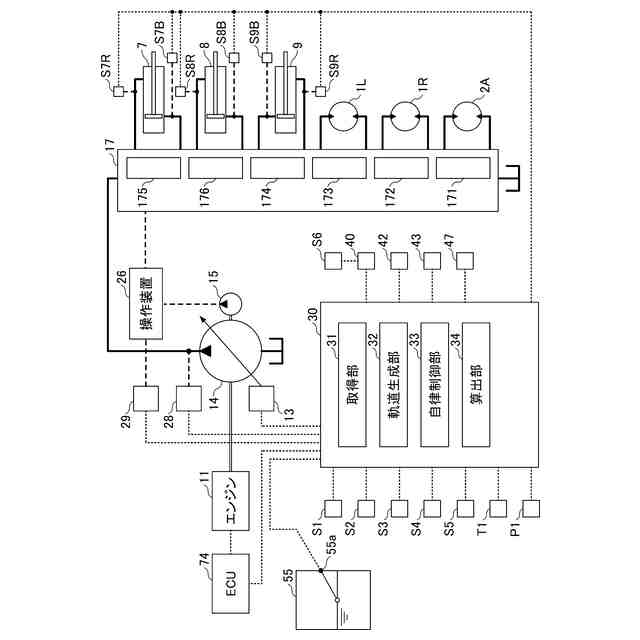
図2は、実施形態に係るショベルの駆動系の構成例を示すブロック図である。
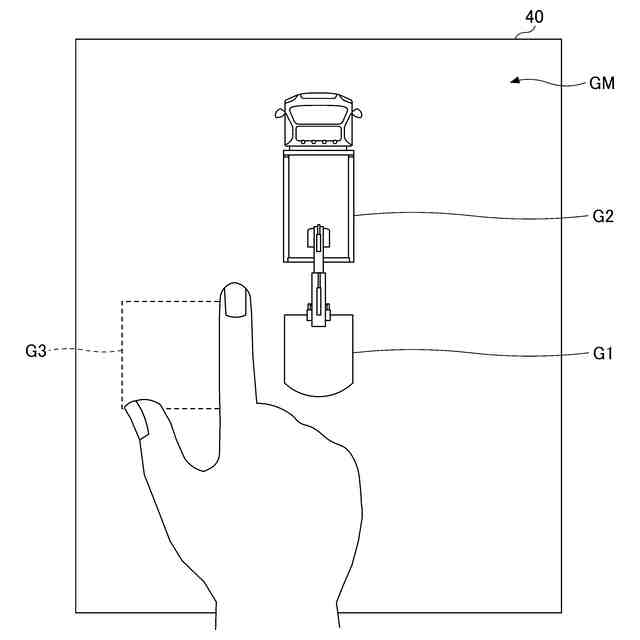
図3は、掘削対象範囲を設定する際に表示装置に表示される設定画面の構成例を示した図である。
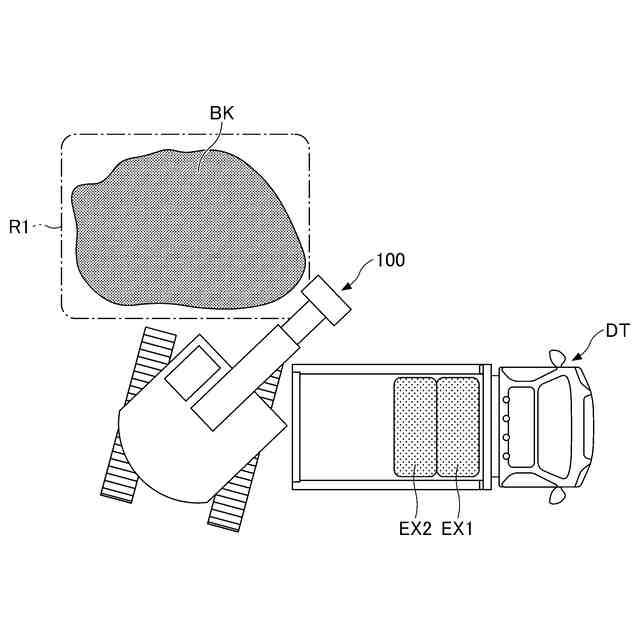
図4は、設定画面で設定された掘削対象範囲にある掘削対象物を掘削するショベルの上面図である。
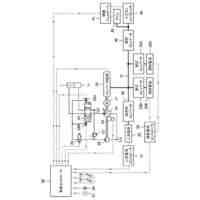
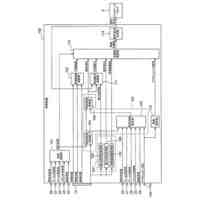
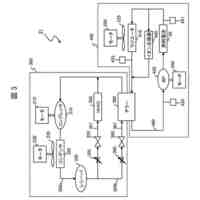
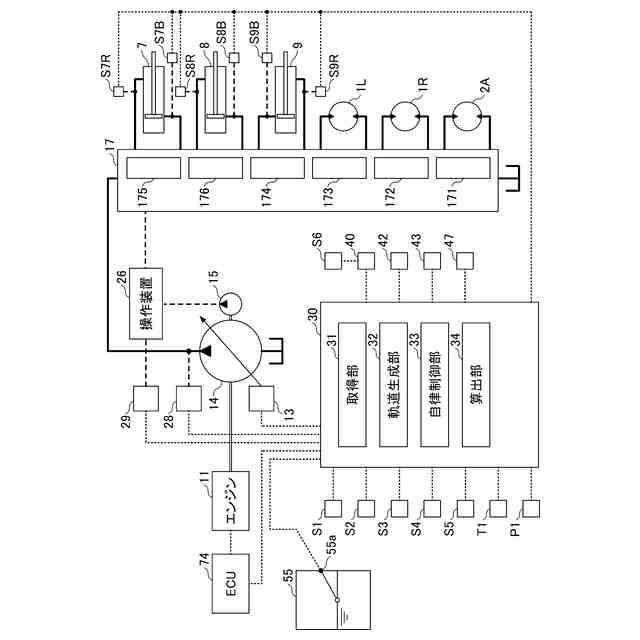
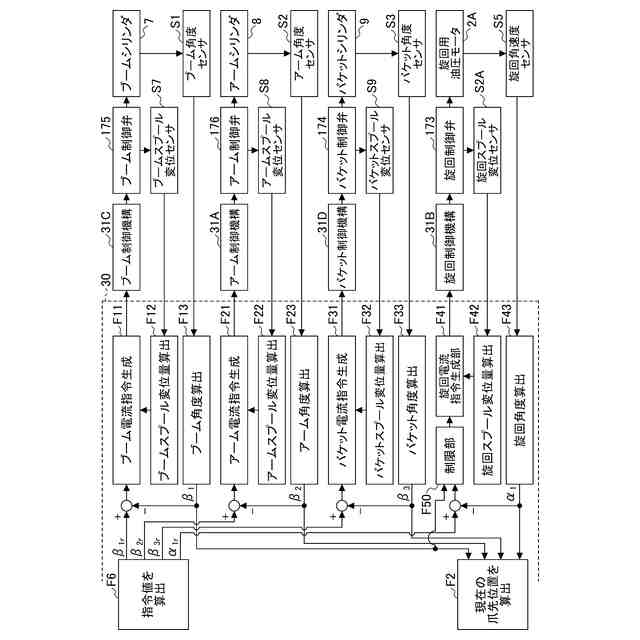
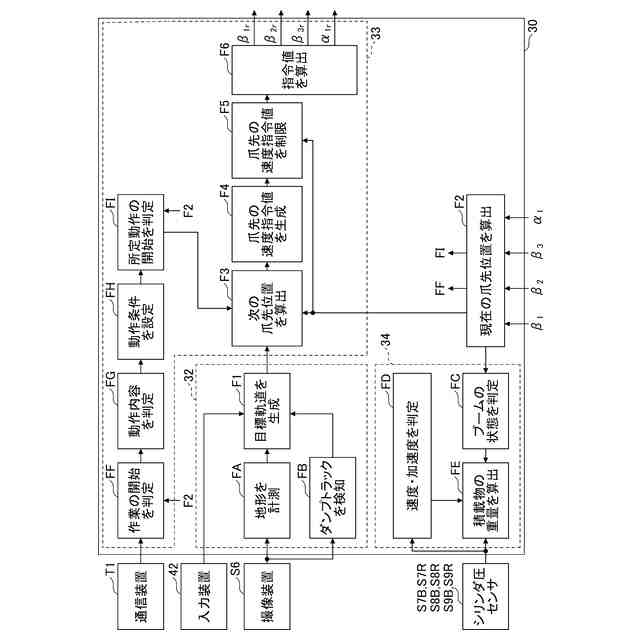
図5は、実施形態に係る自律制御機能の構成例を示すブロック図である。
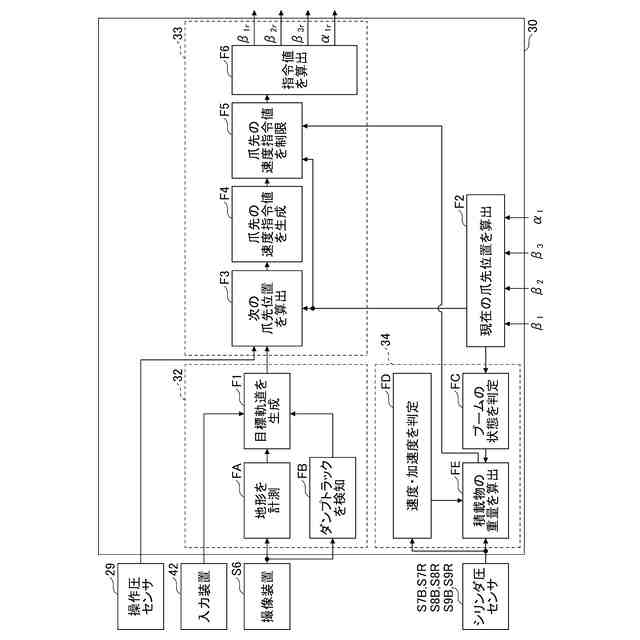
図6は、実施形態に係る、各種指令値を算出する機能要素の構成例を示すブロック図である。
図7は、実施形態に係る自律制御機能の別の構成例を示すブロック図である。
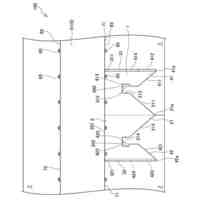
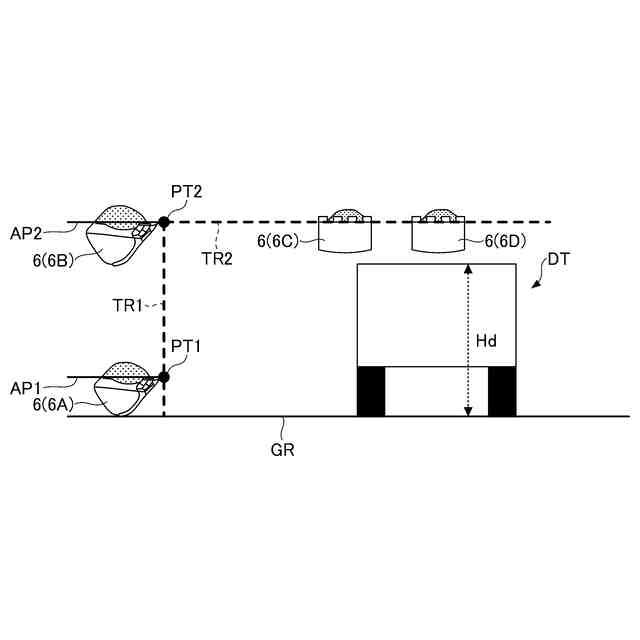
図8は、実施形態に係るバケットの爪先が移動する軌跡を示した図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を参照して説明する。また、以下で説明する実施形態は、発明を限定するものではなく例示であって、実施形態に記述される全ての特徴やその組み合わせは、必ずしも発明の本質的なものであるとは限らない。なお、各図面において同一の又は対応する構成には同一の又は対応する符号を付し、説明を省略することがある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
9日前
個人
構造物の検査方法
10日前
株式会社東部
多翼型鋼管杭
12日前
個人
津波防御三段壁浮上システム。
2日前
カナデビア株式会社
起伏ゲート
10日前
株式会社大林組
基礎構造
16日前
日本車輌製造株式会社
杭打機
12日前
カナデビア株式会社
浮体構造体
2日前
日立建機株式会社
建設機械
16日前
株式会社クボタ
作業機
16日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
16日前
鹿島建設株式会社
埋戻し方法
2日前
カナデビア株式会社
係留装置及びその制御方法
10日前
構法開発株式会社
埋込継手構造
9日前
株式会社SEELS
フェンダー用カバー部材
3日前
株式会社クボタ
フロントローダ及び作業車両
9日前
末広産業株式会社
水路用型枠ユニット
17日前
日立建機株式会社
建設機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
17日前
株式会社エンバイン
連結具及び盛土構造
2日前
株式会社本久
砂防堰堤構造及び砂防堰堤構築方法
16日前
住友建機株式会社
ショベル、ショベルの制御装置
17日前
株式会社日立建機ティエラ
建設機械
17日前
東電設計株式会社
鉄塔基礎構造
16日前
東京コンテック株式会社
地盤復旧オーガー及び地盤復旧方法
9日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
17日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ