TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059909
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023170306
出願日
2023-09-29
発明の名称
作業機
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
E02F
9/22 20060101AFI20250403BHJP(水工;基礎;土砂の移送)
要約
【課題】高負荷による原動機の意図しない停止を防止する。
【解決手段】作業機は、原動機の動力によって作動して作動油を吐出するメインポンプと、作業装置と当該作業装置に装着されたアタッチメントとを含み且つ作業装置とアタッチメントのうちの少なくともいずれかに設けられたアクチュエータが作動油によって作動することで作業を行う作業ユニットと、入力される制御信号に応じて前記アクチュエータへの作動油の流量を変更する電磁弁と、制御信号を電磁弁に入力する制御装置と、原動機の目標回転数を入力するアクセル装置と、原動機の実回転数を検出する回転数センサと備え、制御装置は、原動機に高負荷がかかる所定の作業を作業ユニットにより行っているときに、原動機の実回転数の目標回転数に対する低下量であるドロップ量が第1閾値以上になると、実回転数に応じて制御信号を変更することで、アクチュエータへの作動油の流量を制限する。
【選択図】図1
特許請求の範囲
【請求項1】
機体に搭載された原動機の動力によって作動して作動油を吐出するメインポンプと、
作業装置と当該作業装置に装着されたアタッチメントとを含み且つ前記作業装置と前記アタッチメントのうちの少なくともいずれかに設けられたアクチュエータが前記作動油によって作動することで、前記作業装置及び前記アタッチメントにより作業を行う作業ユニットと、
入力される制御信号に応じて、前記アクチュエータへの前記作動油の流量を変更する電磁弁と、
前記制御信号を前記電磁弁に入力する制御装置と、
前記原動機の目標回転数を入力するアクセル装置と、
前記原動機の実回転数を検出する回転数センサと、備え、
前記制御装置は、前記原動機に高負荷がかかる所定の作業を前記作業ユニットにより行っているときに、前記原動機の前記実回転数の前記目標回転数に対する低下量であるドロップ量が所定の第1閾値以上になると、前記実回転数に応じて前記制御信号を変更することで、前記アクチュエータへの前記作動油の流量を制限する作業機。
続きを表示(約 2,700 文字)
【請求項2】
前記アタッチメントに設けられた前記アクチュエータである付属アクチュエータに対して前記作動油を流入出するポートであるAUXポートと、
前記原動機の動力によって作動してパイロット油を吐出するパイロットポンプと、
AUX受圧部を有し且つ当該AUX受圧部に作用する前記パイロット油の圧力であるパイロット圧に応じて、前記AUXポートを介して前記付属アクチュエータに供給する前記作動油の流量を制御するAUX制御弁と、を備え、
前記電磁弁は、前記制御装置から入力される前記制御信号に応じて、前記AUX受圧部に作用する前記パイロット圧を変更することで、前記AUX制御弁から前記付属アクチュエータへの前記作動油の流量を変更するAUX電磁弁を含み、
前記制御装置は、前記付属アクチュエータが設けられた所定のアタッチメントにより前記所定の作業を行っているときに、前記ドロップ量が前記第1閾値以上になると、前記原動機の前記実回転数に応じて前記制御信号を変更することで、前記AUX受圧部に作用する前記パイロット圧を低下させて、前記AUX制御弁から前記付属アクチュエータへの前記作動油の流量を制限する請求項1に記載の作業機。
【請求項3】
前記制御装置は、
前記所定のアタッチメント以外の他のアタッチメントにより前記所定の作業とは異なる他の作業を行っているときと、前記所定のアタッチメントにより前記所定の作業を行っていても、前記ドロップ量が前記第1閾値以上でないときとには、前記AUX電磁弁への前記制御信号の電流値を所定値にし、
前記所定のアタッチメントにより前記所定の作業を行っているときに、前記ドロップ量が前記第1閾値以上になると、前記他のアタッチメントにより前記他の作業を行っているとき及び前記所定の作業中に前記ドロップ量が前記第1閾値以上でないときよりも、前記AUX電磁弁への前記制御信号の電流値を低下させて、前記付属アクチュエータへの前記作動油の流量を減少させる請求項2に記載の作業機。
【請求項4】
前記原動機の動力によって作動してパイロット油を吐出するパイロットポンプと、
作業受圧部を有し且つ当該作業受圧部に作用する前記パイロット油の圧力であるパイロット圧に応じて、前記作業装置に設けられた作業アクチュエータに供給する前記作動油の流量を制御する作業制御弁と、を備え、
前記電磁弁は、前記制御装置から入力される前記制御信号に応じて、前記作業受圧部に作用する前記パイロット圧を変更することで、前記作業制御弁から前記作業アクチュエータへの前記作動油の流量を変更する作業電磁弁を含み、
前記制御装置は、前記所定の作業を前記作業装置及び前記アタッチメントにより行っているときに、前記ドロップ量が前記第1閾値以上になると、前記原動機の前記実回転数に応じて前記制御信号を変更することで、前記作業受圧部に作用する前記パイロット圧を低下させて、前記作業制御弁から前記作業アクチュエータへの前記作動油の流量を制限する請求項1に記載の作業機。
【請求項5】
前記制御装置は、
前記所定の作業以外の高負荷がかからない他の作業を行っているときと、前記所定の作業を行っていても、前記ドロップ量が前記第1閾値以上でないときとには、前記作業電磁弁への前記制御信号の電流値を所定値にし、
前記所定の作業を行っているときに、前記ドロップ量が前記第1閾値以上になると、前記他の作業を行っているとき及び前記所定の作業中に前記ドロップ量が前記第1閾値以上でないときよりも、前記作業電磁弁への前記制御信号の電流値を低下させて、前記作業アクチュエータへの前記作動油の流量を減少させる請求項4に記載の作業機。
【請求項6】
前記作業装置に装着された前記アタッチメントを示す情報を入力する入力装置を備え、
前記制御装置は、前記アタッチメントを示す情報に基づいて、前記作業ユニットにより行う作業が高負荷のかかる前記所定の作業であるか否かを判断する請求項1に記載の作業機。
【請求項7】
前記制御装置は、前記所定の作業を開始してから所定時間が経過するまでは、前記ドロップ量が前記第1閾値よりも大きい所定の第2閾値になると、前記原動機の前記実回転数に応じて前記電磁弁に入力する前記制御信号を変更することで、前記アクチュエータへの前記作動油の流量を制限する請求項2に記載の作業機。
【請求項8】
前記原動機の動力によって作動し且つポンプ受圧部を有し且つ当該ポンプ受圧部に作用するパイロット油の圧力であるパイロット圧によって作動油の吐出量が変化する可変容量型の走行ポンプと、
前記走行ポンプが吐出した前記作動油により作動する走行モータと、
前記走行モータの出力により作動して前記機体を走行させる走行装置と、
前記制御装置から入力される制御信号に応じて、前記ポンプ受圧部に作用する前記パイロット圧を変更する走行電磁弁と、を備え、
前記制御装置は、前記走行装置による前記機体の走行中に、前記ドロップ量が前記第1閾値と異なる所定の第3閾値以上になると、前記原動機の前記実回転数に応じて前記走行電磁弁に入力する前記制御信号を変更することで、前記走行ポンプからの前記作動油の前記吐出量を制限する請求項1に記載の作業機。
【請求項9】
前記所定の作業を行っているときで且つ前記ドロップ量が前記第1閾値以上になったときにおける、前記電磁弁への前記制御信号の電流値を示す高負荷時制御マップを記憶した記憶装置を備え、
前記高負荷時制御マップは、前記原動機の回転数の低下に比例して、前記制御信号の電流値が低下することを示し、
前記制御装置は、前記高負荷時制御マップと前記原動機の前記実回転数とにより、前記制御信号の電流値を決定し、当該決定した電流値の前記制御信号を前記電磁弁に入力することで、前記アクチュエータへの前記作動油の流量を減少させるように制限する請求項1に記載の作業機。
【請求項10】
前記制御装置は、前記電磁弁に入力している前記制御信号の電流値を、前記高負荷時制御マップと前記原動機の前記実回転数とにより決定した電流値に一致させるように、所定の速度で徐々に変更する請求項9に記載の作業機。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、スキッドステアローダ及びコンパクトトラックローダなどのような作業機に関する。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
スキッドステアローダ及びコンパクトトラックローダなどの作業機は、機体を支持する走行装置によって走行しながら、機体に装備された作業装置と当該作業装置に装着されたバケットなどの各種のアタッチメントとを含む作業ユニットによって、各種の作業を行う。このような作業機において、原動機に大きな負荷がかかると、原動機が意図せず停止することがある。この現象は、原動機がエンジンである場合、エンジンストールと呼ばれている。
【0003】
作業機の原動機の負荷による意図しない停止を防止するため、例えば特許文献1の図1などに開示された技術では、エンジン回転数が所定値以下になると、走行ポンプを作動させるパイロット圧を電磁比例弁により低下させて、走行ポンプの出力(即ち走行系の出力)を制限する。また、特許文献1の図3などに開示された技術では、走行ポンプへのパイロット圧を低下させる電磁比例弁によって、ブームシリンダ用の制御弁へのパイロット圧も低下させて、制御弁からブームシリンダへの作動油の流量(即ち作業系の出力)も制限する。
【0004】
また、例えば特許文献2に開示されているように、ブームシリンダ用の第1制御弁へのパイロット圧と、バケットシリンダ用の第2制御弁へのパイロット圧とを、それぞれ低下させる専用の電磁式可変絞り弁を複数設けて、第1制御弁からブームシリンダへの作動油の流量と、第2制御弁からバケットシリンダへの作動油の流量とを個別に制限する技術もある。上記のように、特許文献1、2に開示された技術では、他の油圧機器に影響が及ばないように、特定のアクチュエータへの作動油の流量を制限している。
【先行技術文献】
【特許文献】
【0005】
特許第6629282号公報
特開2019-65999号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
作業機の作業ユニットにより行う作業には、原動機に高負荷がかかる作業がある。例えば作動するために多大な流量の作動油が必要な高出力のアクチュエータが設けられたアタッチメントを使用した場合、又は作業装置に多大な外力が加わった場合などには、原動機に高負荷がかかる。原動機に高負荷がかかる作業を作業ユニットにより行った場合、原動機の動力が作業系の油圧ポンプで消費される割合が高くなり、原動機の回転数が急激に低下して、原動機が意図せず停止し易くなる。しかしながら、このような原動機に高負荷がかかる場合が想定されていないのが実情である。
【0007】
本発明は、上記問題点に鑑み、高負荷による原動機の意図しない停止を防止することができる作業機を提供することを課題とする。
【課題を解決するための手段】
【0008】
本発明に係る作業機は、機体に搭載された原動機の動力によって作動して作動油を吐出
するメインポンプと、作業装置と当該作業装置に装着されたアタッチメントとを含み且つ前記作業装置と前記アタッチメントのうちの少なくともいずれかに設けられたアクチュエータが前記作動油によって作動することで、前記作業装置及び前記アタッチメントにより作業を行う作業ユニットと、入力される制御信号に応じて、前記アクチュエータへの前記作動油の流量を変更する電磁弁と、前記制御信号を前記電磁弁に入力する制御装置と、前記原動機の目標回転数を入力するアクセル装置と、前記原動機の実回転数を検出する回転数センサと、備える。そして、前記制御装置は、前記原動機に高負荷がかかる所定の作業を前記作業ユニットにより行っているときに、前記原動機の前記実回転数の前記目標回転数に対する低下量であるドロップ量が所定の第1閾値以上になると、前記実回転数に応じて前記制御信号を変更することで、前記アクチュエータへの前記作動油の流量を制限する。
【発明の効果】
【0009】
上記によれば、高負荷による原動機の意図しない停止を防止することができる作業機を提供することが可能になる。
【図面の簡単な説明】
【0010】
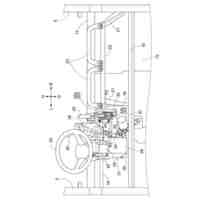
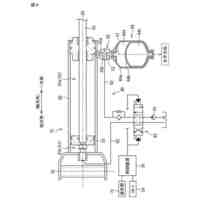
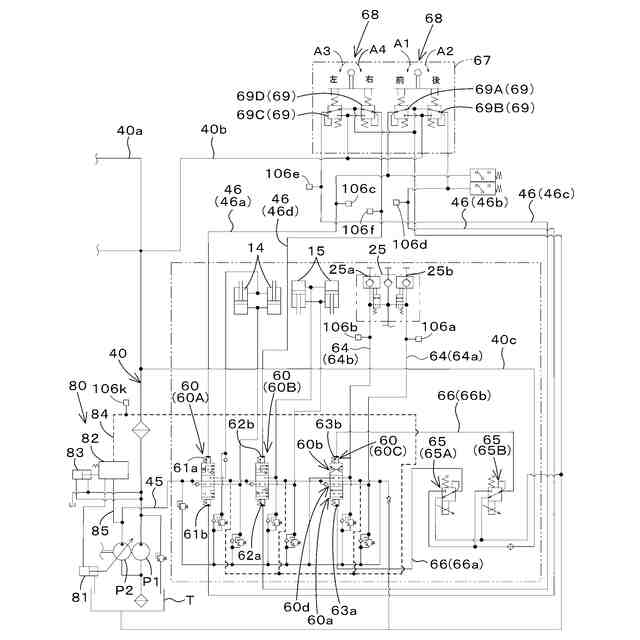
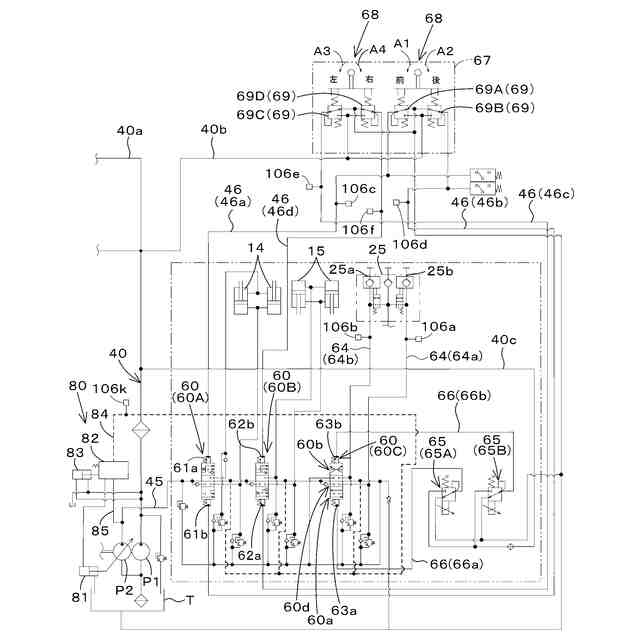
作業機の作業系の油圧回路を示す図である。
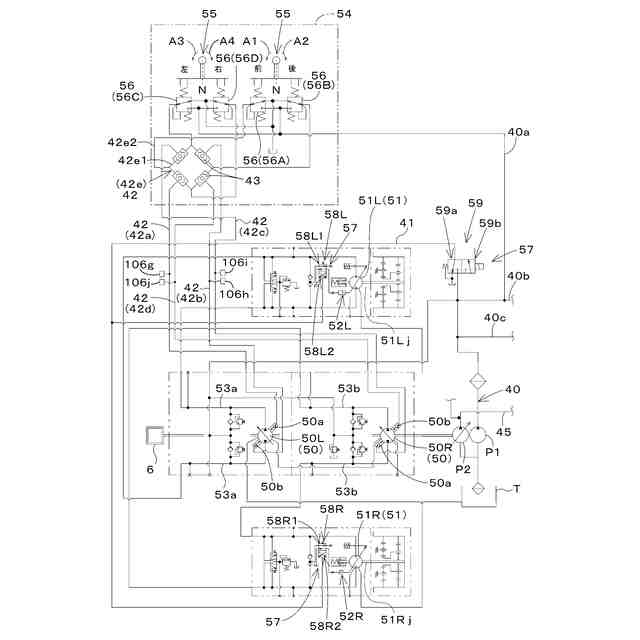
作業機の走行系の油圧回路を示す図である。
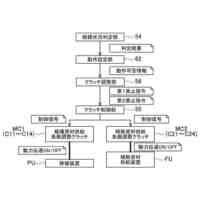
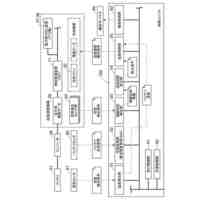
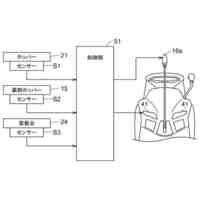
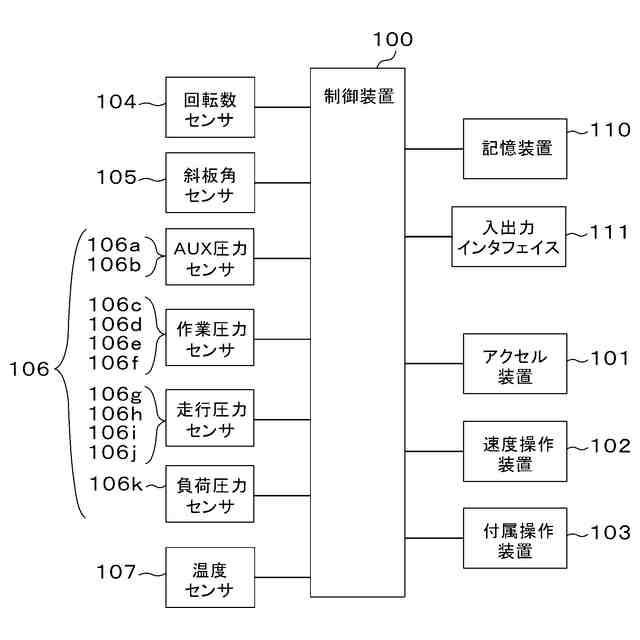
作業機の電気ブロック図である。
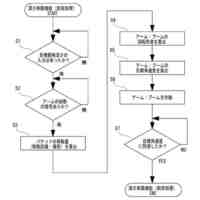
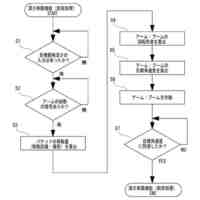
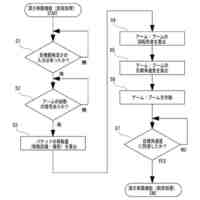
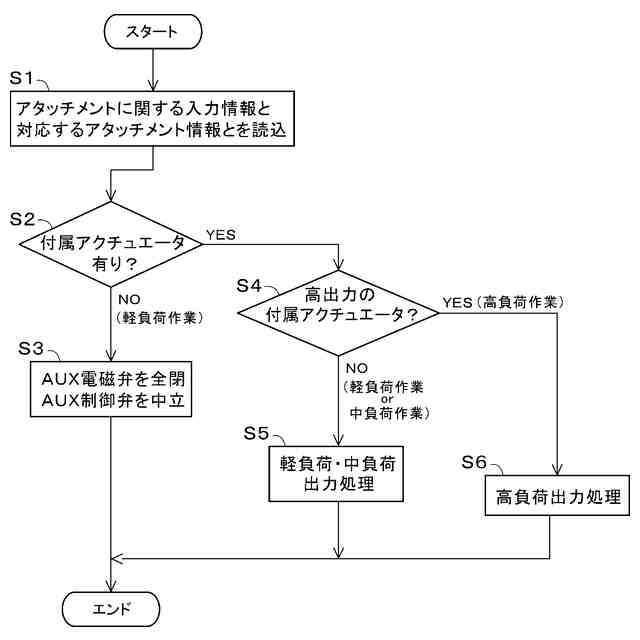
作業機の作業時の動作の一例を示すフローチャートである。
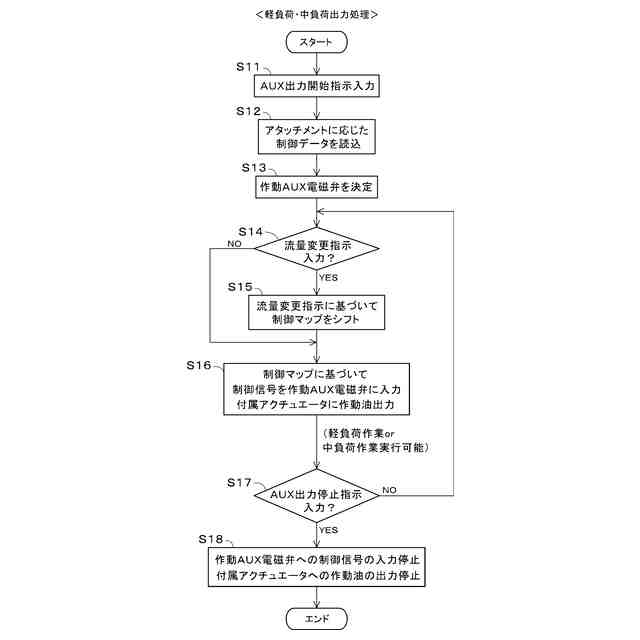
図4の軽負荷・中負荷出力処理の一例を示すフローチャートである。
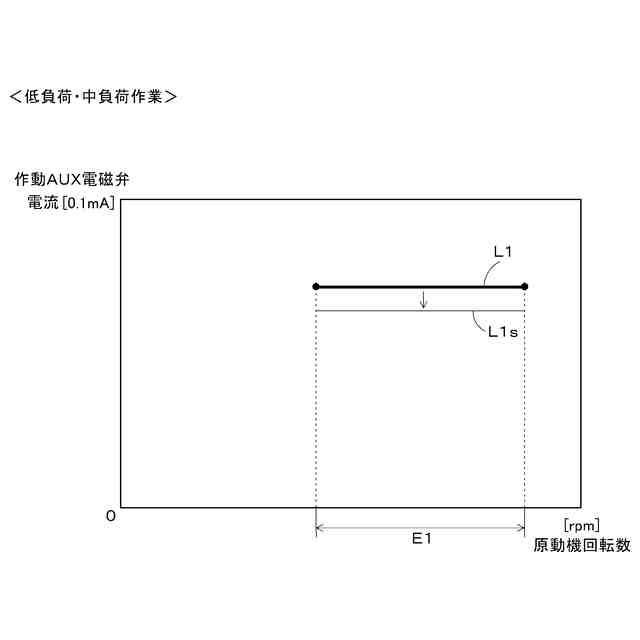
軽負荷・中負荷出力処理時のAUX電磁弁の制御マップの一例を示す図である。
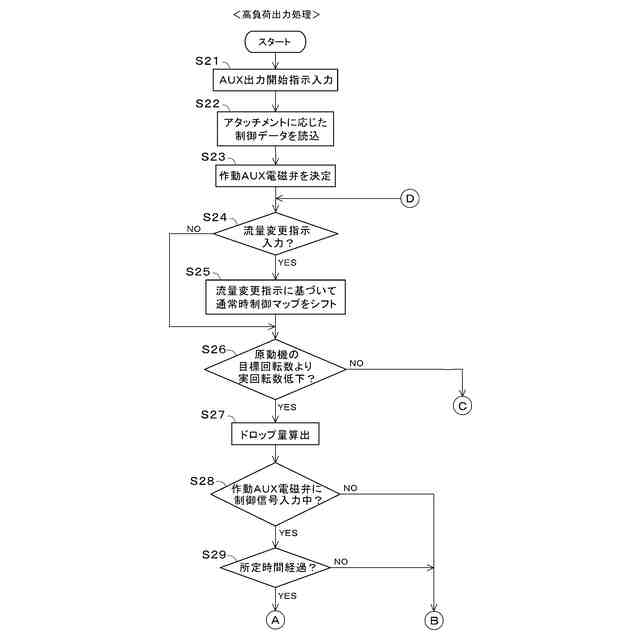
図4の高負荷出力処理の一例を示すフローチャートである。
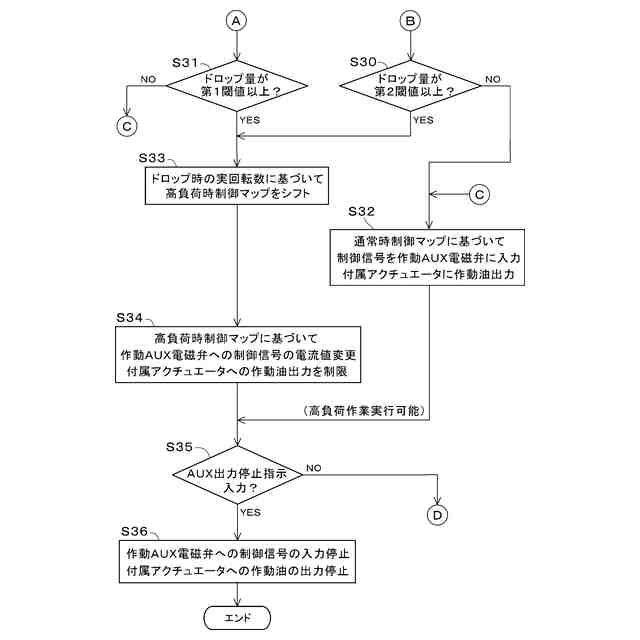
図7Aの続きのフローチャートである。
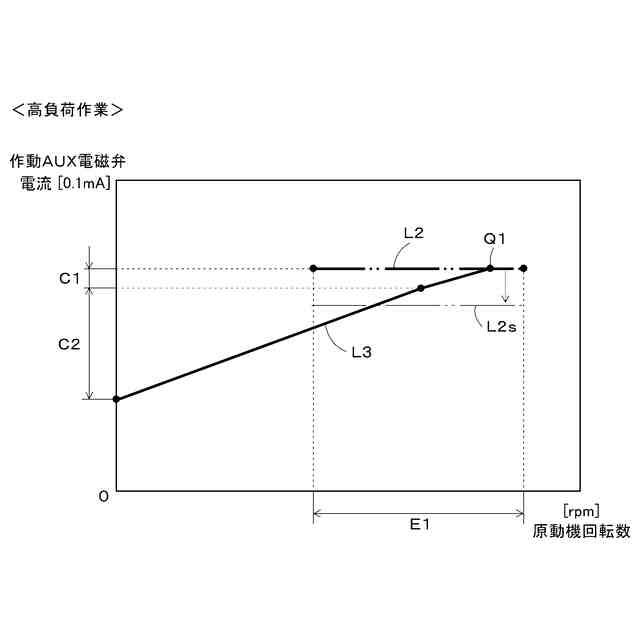
高負荷出力処理時のAUX電磁弁の制御マップの一例を示す図である。
AUX電磁弁の高負荷時制御マップのシフトの一例を示す図である。
AUX電磁弁の通常時制御マップと高負荷時制御マップのシフトの一例を示す図である。
AUX電磁弁の制御信号の電流値の変化の一例を示す図である。
原動機の目標回転数が上がった場合のアクセル信号とアクセル疑似信号と原動機の回転数の一例を示す図である。
原動機の目標回転数が下がった場合のアクセル信号とアクセル疑似信号と原動機の回転数の一例を示す図である。
作業機の作業系の油圧回路の他の例を示す図である。
作業機の作業時の出力処理の一例を示すフローチャートである。
作業電磁弁の制御マップの一例を示す図である。
作業機の走行系の油圧回路の他の例を示す図である。
走行電磁弁の制御マップの一例を示す図である。
作業機の油圧回路の他の例を示す図である。
作業機の油圧回路の他の例を示す図である。
AUX電磁弁の高負荷時制御マップの傾きの補正の一例を示す図である。
AUX電磁弁の高負荷時制御マップの横軸方向へシフトさせた補正の一例を示す図である。
AUX電磁弁の高負荷時制御マップの縦軸方向へシフトさせた補正の一例を示す図である。
AUX電磁弁の高負荷時制御マップの横軸方向及び縦軸方向へシフトさせた補正の一例を示す図である。
作業機の作業系の油圧回路の他の例を示す図である。
アンチストール優先設定画面の一例を示す図である。
AUX電磁弁の高負荷時制御マップの傾きの補正の他の例を示す図である。
AUX電磁弁の高負荷時制御マップの横軸方向へシフトさせた補正の他の例を示す図である。
AUX電磁弁の高負荷時制御マップの縦軸方向へシフトさせた補正の他の例を示す図である。
AUX電磁弁の高負荷時制御マップの横軸方向及び縦軸方向へシフトさせた補正の他の例を示す図である。
作業電磁弁の高負荷時制御マップの傾きの補正の一例を示す図である。
作業電磁弁の高負荷時制御マップの横軸方向へシフトさせた補正の一例を示す図である。
作業電磁弁の高負荷時制御マップの縦軸方向へシフトさせた補正の一例を示す図である。
作業電磁弁の高負荷時制御マップの横軸方向及び縦軸方向へシフトさせた補正の一例を示す図である。
アンチストール優先設定画面の他の例を示す図である。
アンチストール優先設定画面の他の例を示す図である。
アンチストール設定画面の一例を示す図である。
バケット(標準アタッチメント)を装着した作業機の側面図である。
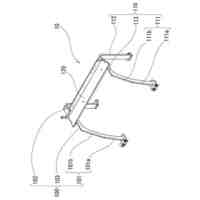
マルチャー(付属アタッチメント)を装着した作業機の側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
3日前
株式会社クボタ
田植機
20日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業機
18日前
株式会社クボタ
作業車
10日前
株式会社クボタケミックス
管継手
1か月前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
田植機
10日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業機
3日前
株式会社クボタ
作業車両
27日前
株式会社クボタ
作業車両
27日前
株式会社クボタ
作物収穫機
13日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
電動作業車
24日前
株式会社クボタ
コンバイン
16日前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
水田作業機
1か月前
株式会社クボタ
圃場作業車
5日前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
電動作業車両
26日前
株式会社クボタ
電動作業車両
1か月前
株式会社クボタ
電動作業車両
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ