TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025062398
公報種別
公開特許公報(A)
公開日
2025-04-14
出願番号
2023171439
出願日
2023-10-02
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/20 20060101AFI20250407BHJP(水工;基礎;土砂の移送)
要約
【課題】作業装置の動作を精度良く制御可能な作業機械を提供することを目的とする。
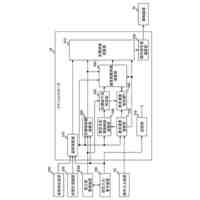
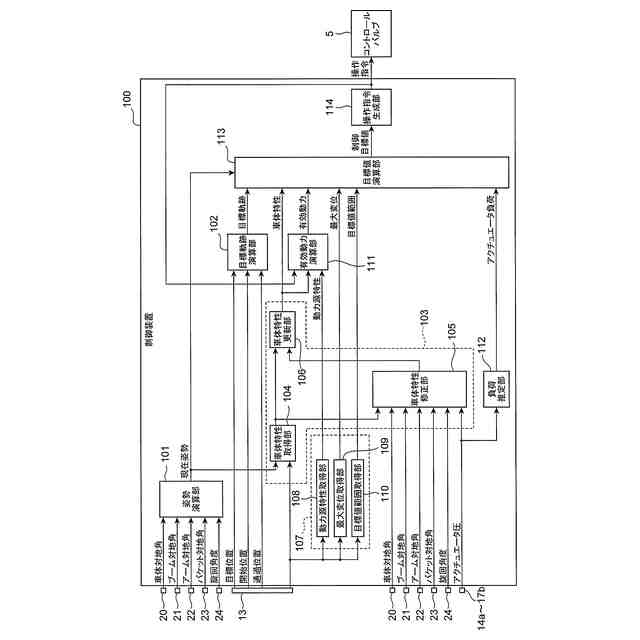
【解決手段】作業機械1は、作業装置1cを駆動するアクチュエータの動作を制御する制御装置100を備える。制御装置100は、作業装置1cの目標軌跡を演算する目標軌跡演算部102と、作業装置1cの動作特性を含む作業機械1の車体特性を演算する車体特性演算部103と、目標軌跡演算部102によって演算された目標軌跡に応じて作業装置1cが動作するよう、アクチュエータの制御目標値を演算する目標値演算部113と、を有する。目標値演算部113は、車体特性演算部103によって演算された車体特性に基づいて、制御目標値を演算する。
【選択図】図2
特許請求の範囲
【請求項1】
作業装置を駆動するアクチュエータの動作を制御する制御装置を備える作業機械であって、
前記制御装置は、
前記作業装置の目標軌跡を演算する目標軌跡演算部と、
前記作業装置の動作特性を含む前記作業機械の車体特性を演算する車体特性演算部と、
前記目標軌跡演算部によって演算された前記目標軌跡に応じて前記作業装置が動作するよう、前記アクチュエータの制御目標値を演算する目標値演算部と、を有し、
前記目標値演算部は、前記車体特性演算部によって演算された前記車体特性に基づいて、前記制御目標値を演算する
ことを特徴とする作業機械。
続きを表示(約 1,900 文字)
【請求項2】
前記目標値演算部は、
前記目標軌跡演算部によって演算された前記目標軌跡に応じた前記作業装置の目標姿勢を演算する目標姿勢演算部と、
前記目標姿勢演算部から出力された前記目標姿勢に応じた前記制御目標値を演算する制御目標値演算部と、を有し、
前記目標姿勢演算部は、前記車体特性演算部によって演算された前記車体特性に基づいて、演算された前記目標姿勢の妥当性を評価し、前記妥当性が無いと評価した場合、演算された前記目標姿勢を修正して、前記制御目標値演算部に出力する
ことを特徴とする請求項1に記載の作業機械。
【請求項3】
前記目標値演算部は、
前記目標軌跡演算部によって演算された前記目標軌跡に応じた前記作業装置の目標姿勢を演算する目標姿勢演算部と、
前記目標姿勢演算部から出力された前記目標姿勢に応じた前記制御目標値を演算する制御目標値演算部と、を有し、
前記制御目標値演算部は、前記車体特性演算部によって演算された前記車体特性に基づいて、演算された前記制御目標値の妥当性を評価し、前記妥当性が無いと評価した場合、演算された前記目標姿勢の修正指示を前記目標姿勢演算部に出力し、
前記目標姿勢演算部は、演算された前記目標姿勢を、前記制御目標値演算部から出力された前記修正指示に従って修正して、前記制御目標値演算部に出力する
ことを特徴とする請求項1に記載の作業機械。
【請求項4】
前記制御装置は、前記アクチュエータの動作を制限する制限情報を取得する制限情報取得部を更に備え、
前記目標姿勢演算部は、前記制限情報取得部によって取得された前記制限情報に基づいて、前記妥当性を評価する
ことを特徴とする請求項2に記載の作業機械。
【請求項5】
前記制御装置は、前記アクチュエータの動作を制限する制限情報を取得する制限情報取得部を更に備え、
前記制御目標値演算部は、前記制限情報取得部によって取得された前記制限情報に基づいて、前記妥当性を評価する
ことを特徴とする請求項3に記載の作業機械。
【請求項6】
前記目標姿勢演算部は、
前記車体特性演算部によって演算された前記車体特性と前記制限情報取得部によって取得された前記制限情報とに基づいて前記作業装置が動作する際の、前記作業装置の姿勢を推定し、
推定された前記姿勢と前記目標姿勢との誤差が許容値より大きい場合には、前記目標姿勢の前記妥当性が無いと評価する
ことを特徴とする請求項4に記載の作業機械。
【請求項7】
前記制御目標値演算部は、
前記車体特性演算部によって演算された前記車体特性と前記制限情報取得部によって取得された前記制限情報とに基づいて前記作業装置が動作する際の、前記アクチュエータの前記制御目標値を推定し、
推定された前記制御目標値と、前記目標姿勢に応じた前記制御目標値との誤差が許容値より大きい場合には、前記目標姿勢に応じた前記制御目標値の前記妥当性が無いと評価する
ことを特徴とする請求項5に記載の作業機械。
【請求項8】
前記制限情報取得部は、前記アクチュエータの最大変位を取得する最大変位取得部を有し、
前記目標姿勢演算部は、前記最大変位取得部によって取得された前記アクチュエータの前記最大変位に基づいて、前記妥当性を評価する
ことを特徴とする請求項4に記載の作業機械。
【請求項9】
前記制限情報取得部は、前記アクチュエータの最大変位を取得する最大変位取得部を有し、
前記制御目標値演算部は、前記最大変位取得部によって取得された前記アクチュエータの前記最大変位に基づいて、前記妥当性を評価する
ことを特徴とする請求項5に記載の作業機械。
【請求項10】
前記制限情報取得部は、前記アクチュエータの動力源が出力可能な動力の範囲を含む動力源特性を取得する動力源特性取得部を有し、
前記制御装置は、前記動力源特性取得部によって取得された前記動力源特性から、前記アクチュエータの動作時の損失を除いた有効動力を演算する有効動力演算部を更に備え、
前記目標姿勢演算部は、前記有効動力演算部によって演算された前記有効動力に基づいて、前記妥当性を評価する
ことを特徴とする請求項4に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
油圧ショベル等の作業機械において、推定した作業装置の姿勢に基づいて、作業装置の動作を制御する技術が提案されている。
【0003】
例えば、特許文献1は、予め設定された作業領域からの上部旋回体及び作業装置の逸脱を防止するために、オペレータによるレバー操作量と、当該操作量におけるアクチュエータの速度特性とに基づいて、旋回中の作業装置の姿勢を推定する。そして、特許文献1は、推定された作業装置の姿勢に基づいて、上部旋回体の旋回停止位置を演算し、この停止位置に近付いた時に旋回を停止させる制御を行う。
【先行技術文献】
【特許文献】
【0004】
特開2020-143449号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の作業機械は、作業装置を駆動するアクチュエータの速度特性に基づいて旋回中の作業装置の姿勢を推定しているが、この速度特性には、むだ時間又は応答遅れといった作業機械1の車体特性が考慮されていない。したがって、特許文献1の作業機械は、作業装置の姿勢の推定精度が十分ではなく、結果的に作業装置の制御精度が悪化する可能性がある。
【0006】
上記事情に鑑みて、本発明は、作業装置の姿勢の推定精度を向上させて、作業装置の動作を精度良く制御可能な作業機械を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の作業機械は、作業装置を駆動するアクチュエータの動作を制御する制御装置を備える作業機械であって、前記制御装置は、前記作業装置の目標軌跡を演算する目標軌跡演算部と、前記作業装置の動作特性を含む前記作業機械の車体特性を演算する車体特性演算部と、前記目標軌跡演算部によって演算された前記目標軌跡に応じて前記作業装置が動作するよう、前記アクチュエータの制御目標値を演算する目標値演算部と、を有し、前記目標値演算部は、前記車体特性演算部によって演算された前記車体特性に基づいて、前記制御目標値を演算することを特徴とする。
【発明の効果】
【0008】
本発明によれば、作業装置の姿勢の推定精度を向上させて、作業装置の動作を精度良く制御可能な作業機械を提供することができる。
【図面の簡単な説明】
【0009】
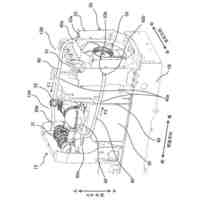
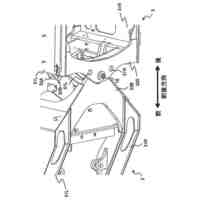
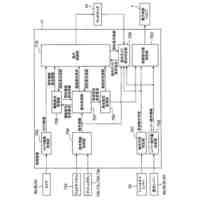
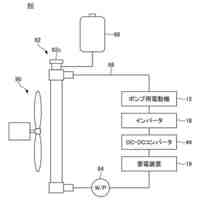
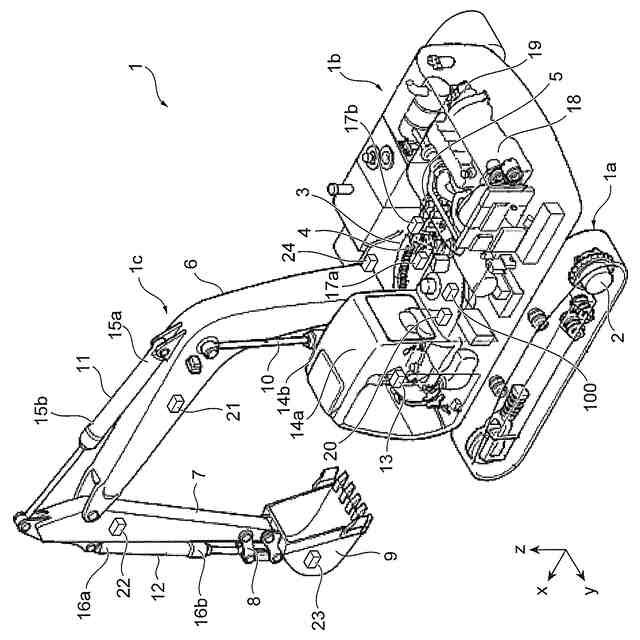
作業機械の構成を示す図。
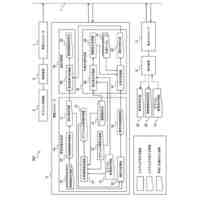
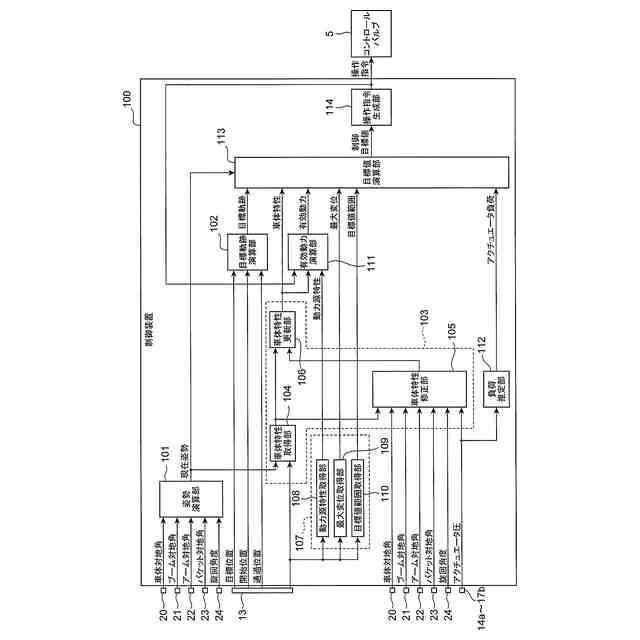
第1実施形態の制御装置の機能的構成を示すブロック図。
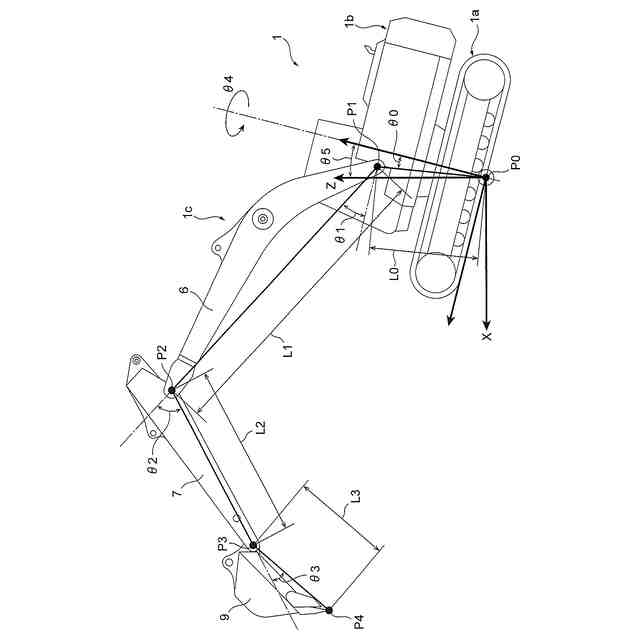
作業装置及び上部旋回体の姿勢の演算方法を説明する図。
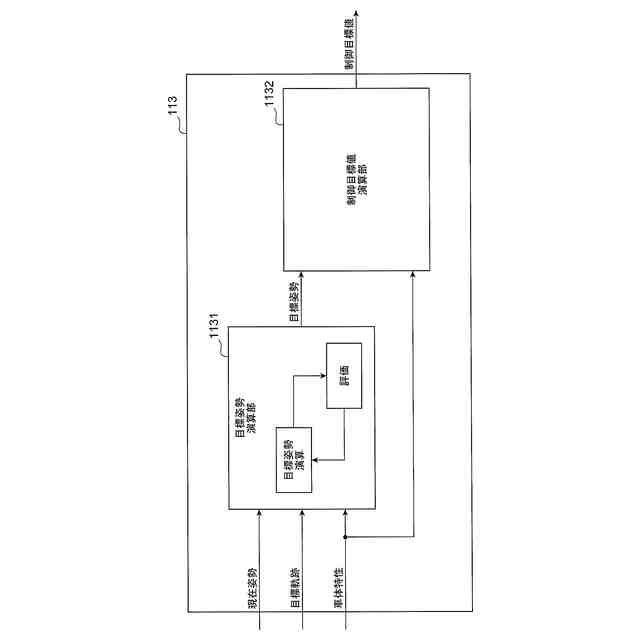
図2に示す目標値演算部の詳細を示すブロック図。
制御目標値と操作指令との関係を示す図。
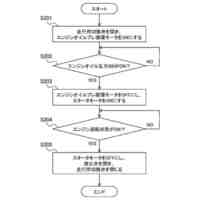
図2に示す制御装置の初期設定に係る処理を示すフローチャート。
図6の後に行われる制御装置の処理を示すフローチャート。
図7のステップS205を説明する図。
図7のステップS207を説明する図。
図7のステップS208を説明する図(その1)。
図7のステップS208を説明する図(その2)。
図7のステップS208を説明する図(その3)。
図7のステップS210を説明する図。
第2実施形態の目標値演算部の詳細を示すブロック図。
第2実施形態の制御装置の処理を示すフローチャート。
図15のステップS309を説明する図。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図面を用いて説明する。各実施形態において同一の符号を付された構成要素については、特に言及しない限り、各実施形態において同様の構成要素を有し、その説明を省略する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
27日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
減速装置
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業車両
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
29日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
建設機械
2日前
日立建機株式会社
電子機器装置
21日前
日立建機株式会社
電動式作業機械
今日
日立建機株式会社
ダンプトラック
20日前
日立建機株式会社
電動式建設機械
6日前
日立建機株式会社
ダンプトラック
1か月前
日立建機株式会社
コントローラの筐体
2か月前
日立建機株式会社
点検ワークフロー管理システム
1か月前
日立建機株式会社
オプション用機器着脱支援システムおよび作業機械
6日前
日立建機株式会社
作業機械
2か月前
個人
耐震原子炉設備
1か月前
個人
簡易免震構造
5日前
FKS株式会社
擁壁
1か月前
株式会社forch
土採取装置
1か月前
鹿島建設株式会社
基礎構造
29日前
株式会社竹中工務店
建築方法
27日前
株式会社クボタ
作業車
21日前
株式会社富田製作所
継手部構造
29日前
株式会社竹中工務店
杭基礎構造
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
作業機械
20日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ