TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025103929
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221678
出願日
2023-12-27
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
B64U
70/93 20230101AFI20250702BHJP(航空機;飛行;宇宙工学)
要約
【課題】無人飛行体の損傷を防止し、かつ、無人飛行体によって作業機械の作業の支援を適切に行う。
【解決手段】作業機械は、車体と、車体に取り付けられた作業装置と、車体に取り付けられた電源装置と、電源装置から電力供給ケーブルを介して供給される電力によって飛行する無人飛行体と、を備えた作業機械において、作業装置には、無人飛行体が離着陸する離着陸台を有する発着装置と、電力供給ケーブルを固定するケーブル固定部と、が設けられ、発着装置及び無人飛行体の少なくとも一方には、無人飛行体を離着陸台に固定する固定装置が設けられ、発着装置は、少なくとも、無人飛行体が発着装置から離陸する際、及び無人飛行体が発着装置に着陸する際に、離着陸台を水平姿勢にする水平機構を有している。
【選択図】図4
特許請求の範囲
【請求項1】
車体と、
前記車体に取り付けられた作業装置と、
前記車体に取り付けられた電源装置と、
前記電源装置から電力供給ケーブルを介して供給される電力によって飛行する無人飛行体と、を備えた作業機械において、
前記作業装置には、前記無人飛行体が離着陸する離着陸台を有する発着装置と、前記電力供給ケーブルを固定するケーブル固定部と、が設けられ、
前記発着装置及び前記無人飛行体の少なくとも一方には、前記無人飛行体を前記離着陸台に固定する固定装置が設けられ、
前記発着装置は、少なくとも、前記無人飛行体が前記発着装置から離陸する際、及び前記無人飛行体が前記発着装置に着陸する際に、前記離着陸台を水平姿勢にする水平機構を有している、
ことを特徴とする作業機械。
続きを表示(約 2,100 文字)
【請求項2】
請求項1に記載の作業機械において、
前記無人飛行体の離陸と着陸を指示する指示装置と、
前記指示装置による指示に基づき、前記無人飛行体及び前記固定装置を制御する制御装置と、を備え、
前記車体は、走行体と、前記走行体に対して旋回可能に設けられた旋回体と、を有し、
前記制御装置は、
前記作業装置、前記旋回体及び前記走行体が動作しているか否かを判定し、
前記作業装置、前記旋回体及び前記走行体のうちの少なくともいずれかが動作している場合には、前記指示装置により前記無人飛行体の着陸が指示されたとしても、前記無人飛行体を前記離着陸台に着陸させず、前記無人飛行体の飛行を維持させ、
前記作業装置、前記旋回体及び前記走行体のいずれもが動作していない場合であって、前記指示装置により前記無人飛行体の着陸が指示されたときには、前記無人飛行体を前記離着陸台に着陸させ、前記固定装置により前記無人飛行体を前記離着陸台に固定する、
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記無人飛行体の離陸と着陸を指示する指示装置と、
前記指示装置による指示に基づき、前記無人飛行体及び前記固定装置を制御する制御装置と、を備え、
前記車体は、走行体と、前記走行体に対して旋回可能に設けられた旋回体と、を有し、
前記制御装置は、
前記作業装置、前記旋回体及び前記走行体が動作しているか否かを判定し、
前記固定装置により前記無人飛行体が前記離着陸台に固定されている状態において、前記作業装置、前記旋回体及び前記走行体のうちの少なくともいずれかが動作している場合には、前記指示装置により前記無人飛行体の離陸が指示されたとしても、前記固定装置による前記無人飛行体の固定を維持し、
前記固定装置により前記無人飛行体が前記離着陸台に固定されている状態において、前記作業装置、前記旋回体及び前記走行体のいずれもが動作していない場合であって、前記指示装置により前記無人飛行体の離陸が指示されたときには、前記固定装置による前記無人飛行体の固定を解除し、前記無人飛行体を離陸させる、
ことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
前記ケーブル固定部は、前記発着装置よりも前記作業装置の先端側に設けられている、
ことを特徴とする作業機械。
【請求項5】
請求項1に記載の作業機械において、
前記水平機構は、
前記離着陸台を回動可能に保持する回動軸と、
前記離着陸台を水平姿勢に保持するための重錘と、を有している、
ことを特徴とする作業機械。
【請求項6】
請求項1に記載の作業機械において、
前記発着装置の前記水平機構を制御する制御装置を備え、
前記水平機構は、
前記離着陸台を回動可能に保持する回動軸と、
前記回動軸を介して前記離着陸台を回動させる電動モータと、を有し、
前記制御装置は、前記電動モータを制御することにより、前記離着陸台を水平姿勢にする、
ことを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記無人飛行体の離陸と着陸を指示する指示装置を備え、
前記制御装置は、前記指示装置による指示に基づき、前記無人飛行体、前記固定装置及び前記水平機構を制御し、
前記制御装置は、
前記固定装置により前記無人飛行体が前記離着陸台に固定されている状態において、前記指示装置により前記無人飛行体の離陸が指示されたときには、前記水平機構により前記離着陸台を水平姿勢にし、前記固定装置による前記無人飛行体の固定を解除し、前記無人飛行体を離陸させ、
前記無人飛行体が飛行している状態において、前記指示装置により前記無人飛行体の着陸が指示されたときには、前記水平機構により前記離着陸台を水平姿勢にし、前記無人飛行体を前記離着陸台に着陸させ、前記固定装置により前記無人飛行体を前記離着陸台に固定する、
ことを特徴とする作業機械。
【請求項8】
請求項1に記載の作業機械において、
前記ケーブル固定部は、前記無人飛行体に接続される電力供給ケーブルを巻き取り可能な巻取装置に設けられている、
ことを特徴とする作業機械。
【請求項9】
請求項5に記載の作業機械において、
前記ケーブル固定部は、前記無人飛行体に接続される電力供給ケーブルを巻き取り可能な巻取装置に設けられ、
前記巻取装置は、前記巻取装置の重心が前記回動軸よりも下側になるように前記離着陸台に取り付けられ、前記重錘として機能する、
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
解体機などの作業機械が作業を行う作業現場において、ドローンなどの無人飛行体を利用して作業機械の作業を支援する技術が知られている。特許文献1には、車体に設けられる電源装置(電力供給手段)から電力供給ケーブルを介して無人飛行体(ドローン)に電力を供給可能な作業機械(クレーン)が開示されている。
【0003】
特許文献1には、無人飛行体と作業機械とを連結して、無人飛行体の落下を防止する落下防止線材が設けられた形態(特許文献1の図1参照)と、無人飛行体をレール状のガイド部材に沿って滑動可能に支持する形態(特許文献1の図11参照)とが開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2020-180000号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
落下防止線材が設けられた作業機械(特許文献1の図1参照)では、無人飛行体が停止しているときには、落下防止線材により無人飛行体が吊り下げられた状態になる。このため、無人飛行体が停止しているときに、無人飛行体と作業機械との接触や無人飛行体と周囲構造物との接触に起因して、無人飛行体が破損するおそれがある。
【0006】
レール状のガイド部材が設けられた作業機械(特許文献1の図11参照)では、無人飛行体はガイド部材に沿う方向にしか移動できず、作業機械の作業の支援を適切に行うことが難しくなるおそれがある。
【0007】
本発明は、無人飛行体の損傷を防止し、かつ、無人飛行体によって作業機械の作業の支援を適切に行うことを目的とする。
【課題を解決するための手段】
【0008】
本発明の一態様による作業機械は、車体と、前記車体に取り付けられた作業装置と、前記車体に取り付けられた電源装置と、前記電源装置から電力供給ケーブルを介して供給される電力によって飛行する無人飛行体と、を備えた作業機械において、前記作業装置には、前記無人飛行体が離着陸する離着陸台を有する発着装置と、前記電力供給ケーブルを固定するケーブル固定部と、が設けられ、前記発着装置及び前記無人飛行体の少なくとも一方には、前記無人飛行体を前記離着陸台に固定する固定装置が設けられ、前記発着装置は、少なくとも、前記無人飛行体が前記発着装置から離陸する際、及び前記無人飛行体が前記発着装置に着陸する際に、前記離着陸台を水平姿勢にする水平機構を有している。
【発明の効果】
【0009】
本発明によれば、無人飛行体の損傷を防止することができ、かつ、無人飛行体によって作業機械の作業の支援を適切に行うことができる。
【図面の簡単な説明】
【0010】
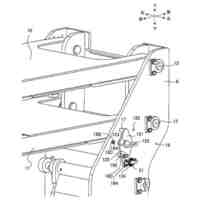
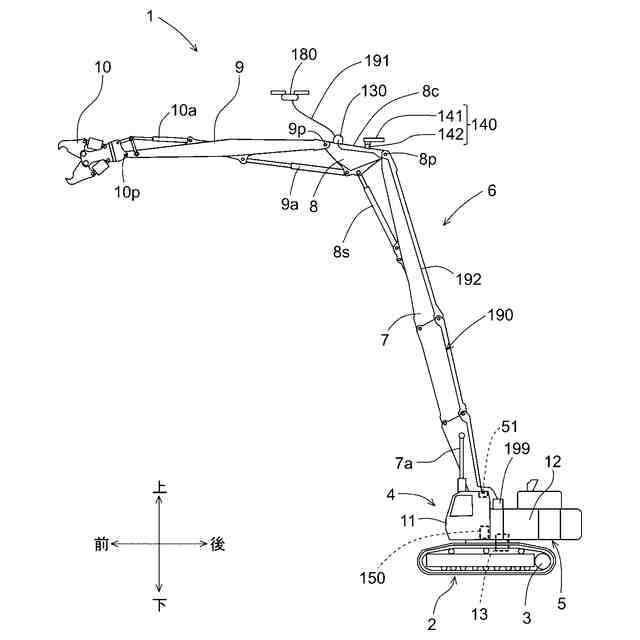
図1は、解体機を示す側面図である。
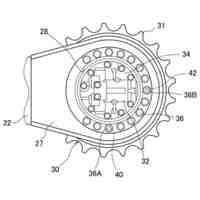
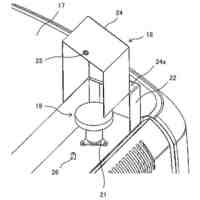
図2は、ドローン、発着装置及びケーブル固定部の斜視図であり、ドローンが飛行している状態を示す。
図3は、ドローン、発着装置及びケーブル固定部の斜視図であり、ドローンが発着装置に固定されている状態を示す。
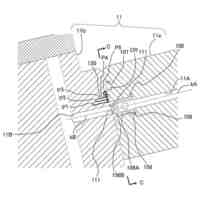
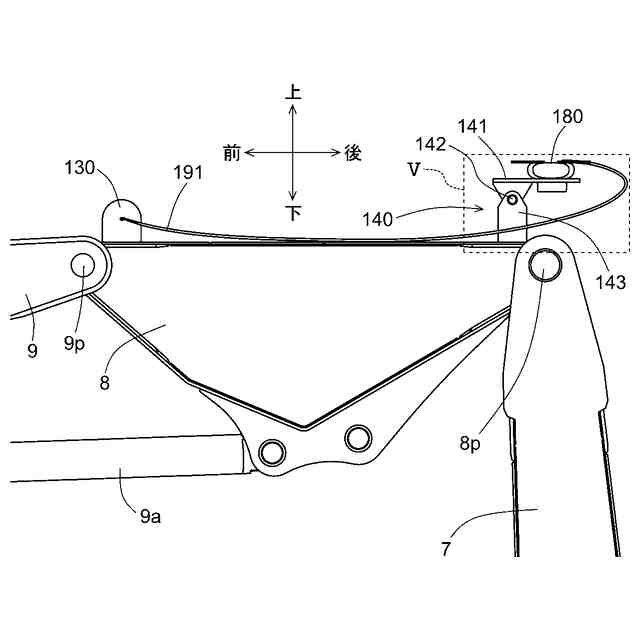
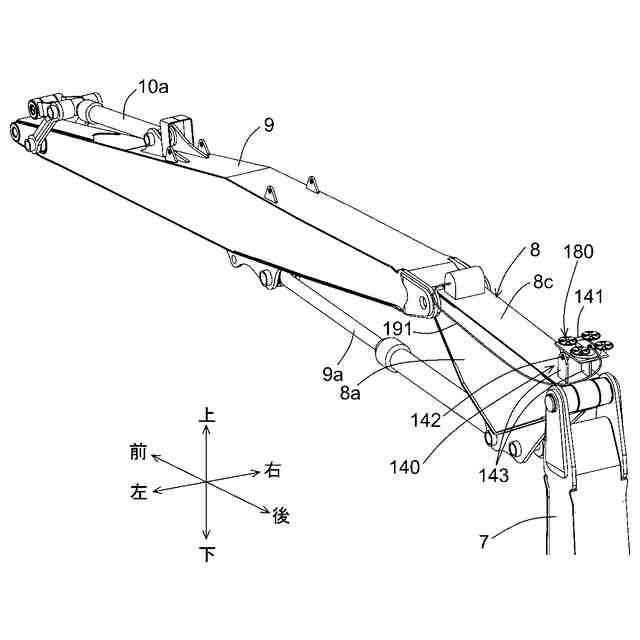
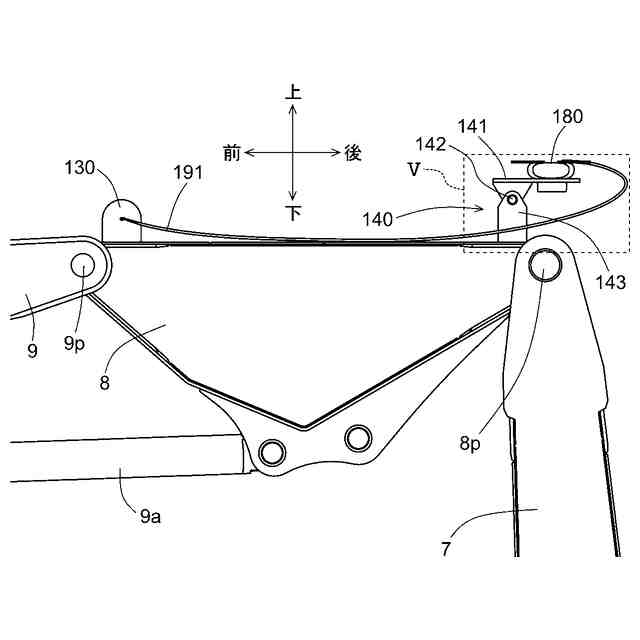
図4は、第1実施形態に係る発着装置及びケーブル固定部の側面図である。
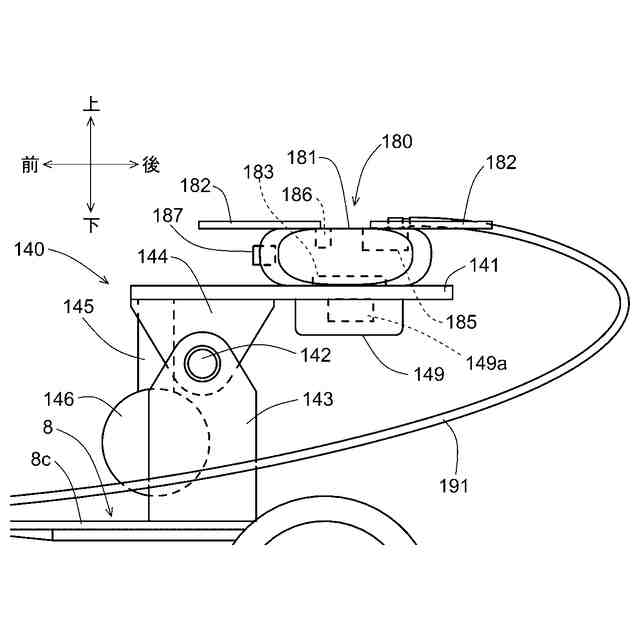
図5は、第1実施形態に係る発着装置の側面図である。
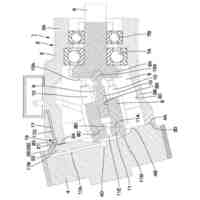
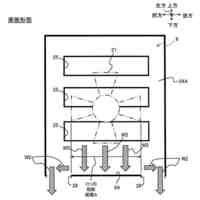
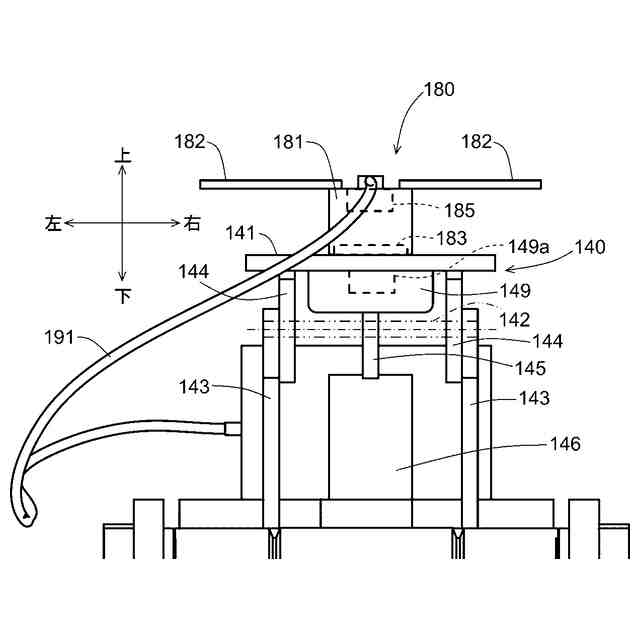
図6は、第1実施形態に係る発着装置の背面図である。
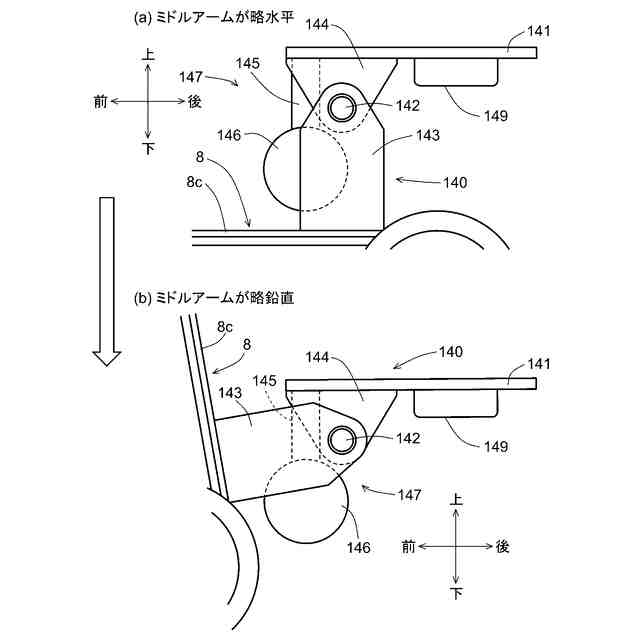
図7は、発着装置の水平機構の動作を示す図であり、(a)はミドルアームの背面板が水平方向に略平行になっている状態を示し、(b)はミドルアームの背面板が鉛直方向に略平行になっている状態を示している。
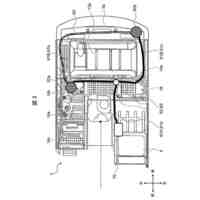
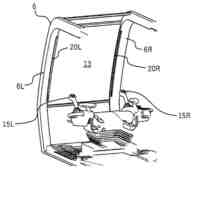
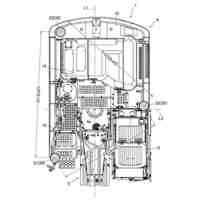
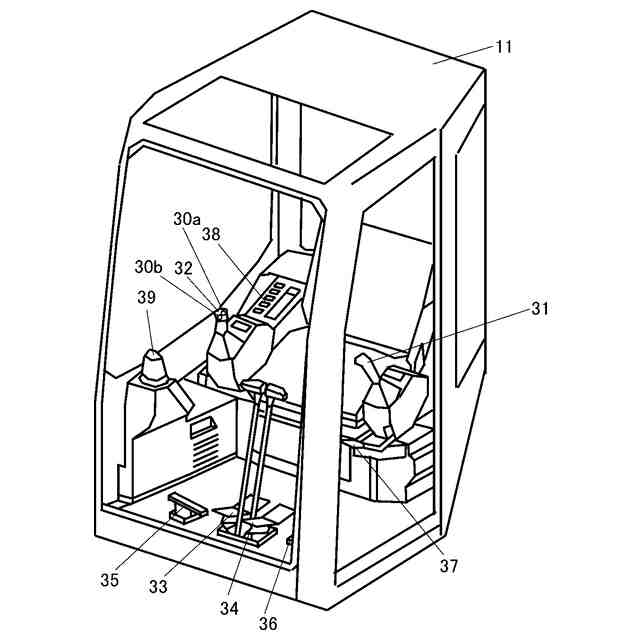
図8は、キャブの内部を示す斜視図である。
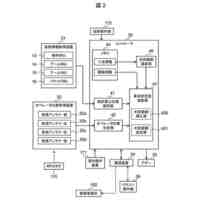
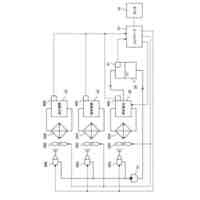
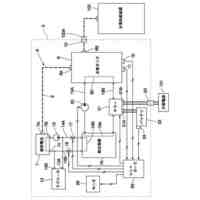
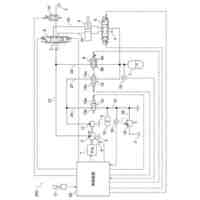
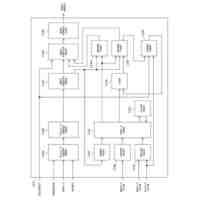
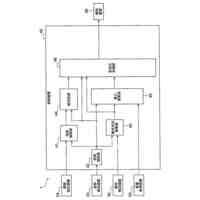
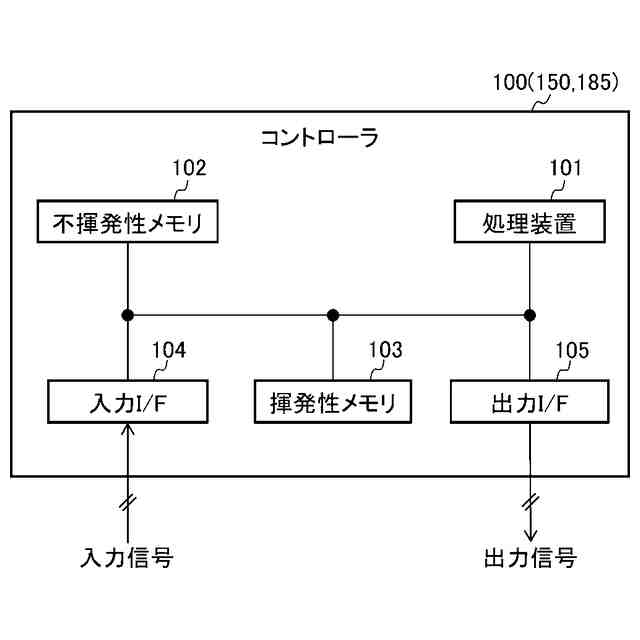
図9は、コントローラのハードウェア構成図である。
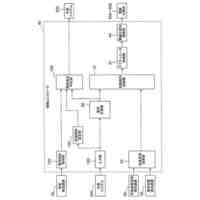
図10は、車体コントローラと飛行コントローラとの情報の授受について示す図である。
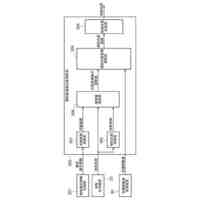
図11は、第1実施形態に係る車体コントローラの機能ブロック図である。
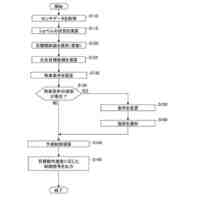
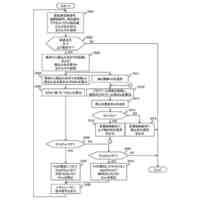
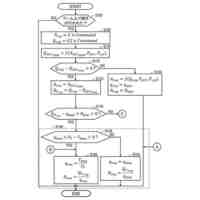
図12は、車体コントローラにより実行される離陸制御の処理の流れの一例を示すフローチャートである。
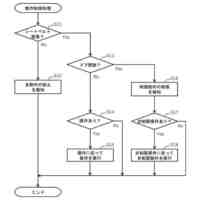
図13は、車体コントローラにより実行される着陸制御の処理の流れの一例を示すフローチャートである。
図14は、第2実施形態に係る発着装置の側面図であり、ミドルアームの背面板が水平方向に略平行になっている状態を示している。
図15は、第2実施形態に係る発着装置の背面図であり、ミドルアームの背面板が水平方向に略平行になっている状態を示している。
図16は、第2実施形態に係る発着装置の側面図であり、ミドルアームの背面板が鉛直方向に略平行になっている状態を示している。
図17は、第2実施形態に係る車体コントローラの機能ブロック図である。
図18は、変形例1に係る発着装置の側面図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業車両
17日前
日立建機株式会社
油圧機器
12日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業車両
13日前
日立建機株式会社
建設機械
13日前
日立建機株式会社
建設機械
13日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
油圧機器
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
21日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業車両
13日前
日立建機株式会社
作業車両
11日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業車両
6日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業車両
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
作業機械
10日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ