TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009623
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2023128686
出願日
2023-08-07
発明の名称
ドローンを自動離着陸する方法
出願人
個人
代理人
主分類
B64U
10/60 20230101AFI20250109BHJP(航空機;飛行;宇宙工学)
要約
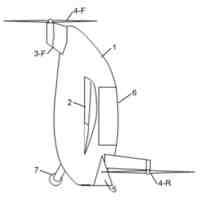
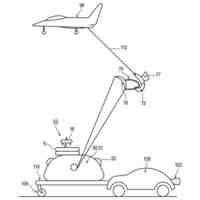
【課題】ドローンの飛行体の飛行操作をせずに、ドローンの飛行を外部機材を使って自動的に離着陸及び追尾飛行させる。
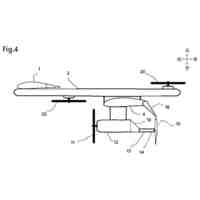
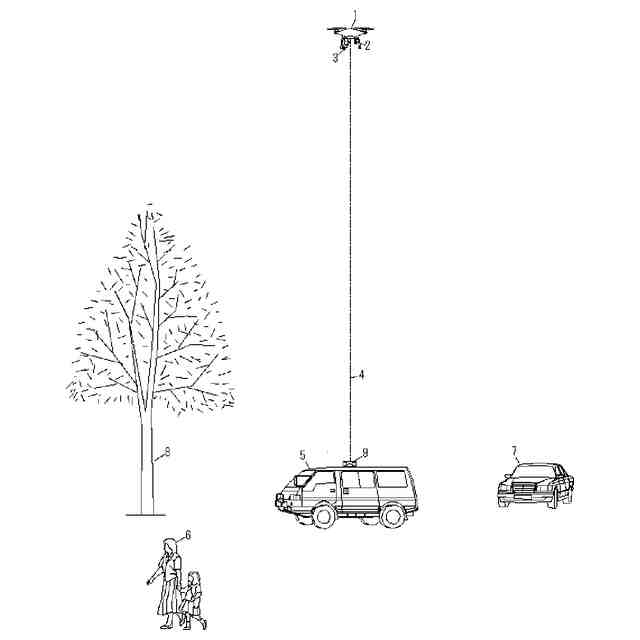
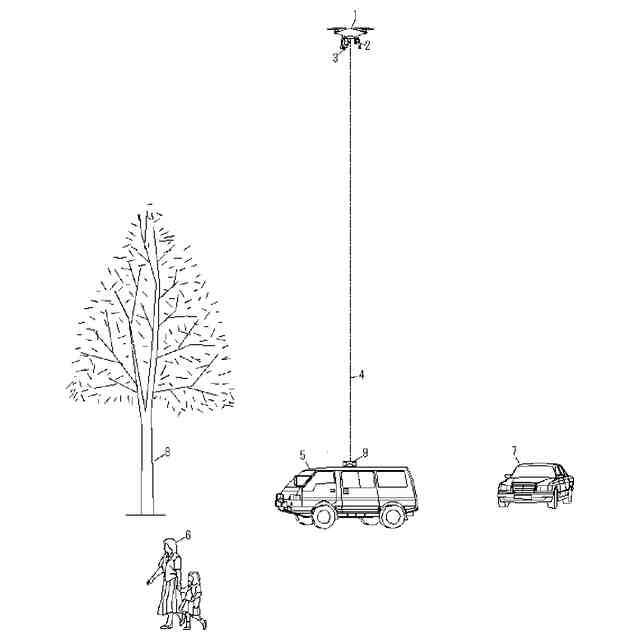
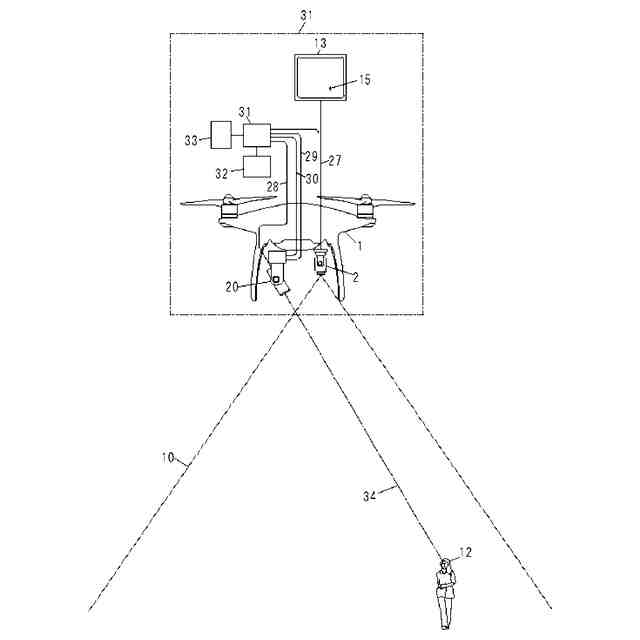
【解決手段】主に外部から通電した電力を使って、モーターにつながるプロペラを回転させて上昇する飛行体1であって、上昇しようとする浮力と紐4の張力を使って、飛行体1を予め設定した紐4の長さで上空に繋ぎ留めて飛行させる。紐4の長さの上空を飛行する飛行体1に繋がる紐4を手繰り寄せることで、上昇しようとする飛行体1を手繰り寄せる位置に着陸させる。紐4の長さの上空からの、紐4を繋ぐ同じ場所を継続的にテレビカメラ2の撮影と距離計測と照明と収音をするために、飛行体1を設定した上空に長時間自動飛行させ、自動離着陸を行う。
【選択図】図1
特許請求の範囲
【請求項1】
プロペラの回転する浮力によって飛行する巻取機に巻かれた紐に結ばれた飛行体であって、前記巻取機に巻かれた紐を巻き解いて前記巻取機の位置の着置から上昇させ、上昇し様とする前記飛行体を前記巻取機の前もって設定した紐の長さを巻き解いた上空に留めて飛行させ、前記上昇し様とする前記飛行体を前記設定した紐の長さを前記巻取機を使って巻取ることで、前記飛行体を前記巻取機の位置に着置させることを特徴とする方法。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の方法であって、前記飛行体を結ぶ前記紐に組み込まれた電線から供給する電力を受けて回転するモーター使って回転するプロペラの前記浮力によって上昇する前記飛行体であることを特徴とする方法。
【請求項3】
請求項1に記載の方法であって、前記飛行体を結ぶ前記紐に組み込まれた電線から供給した電力を受けて回転するモーター使って回転するプロペラの前記浮力によって上昇を始める前記飛行体であることを特徴とする方法。
【請求項4】
請求項1に記載の方法であって、前記飛行体に繋がる前記紐を前記巻取機を移動する車両に取り付けて、前記飛行体を前記設定した紐の長さを使って前記車両に追尾して飛行させることを特徴とする方法。
【請求項5】
請求項1に記載の方法であって、前記飛行体の底部にLEDの発光する照明具を取り付けて、前記飛行体の下方向を照らすことを特徴とする方法。
【請求項6】
請求項1に記載の方法であって、前記LEDを発光する電力を前記電線から供給することを特徴とする方法。
【請求項7】
請求項1に記載の方法であって、バッテリー及び発電機の何れかから前記電力を供給することを特徴とする方法。
【請求項8】
請求項1から請求項7に記載の方法であって、前記飛行体の下側に取り付けたテレビカメラを使って被写体を撮影して得られたテレビ画面上に映る前記被写体の画像の位置と、
前記飛行体の下側に取り付けた駆動機構の撮影方向を変える数値制御のテレビカメラを使って前記被写体の画像を撮影した、前記駆動機構の駆動位置の駆動数値を関連付け、
前記テレビカメラを使って幾つかの異なる位置の前記被写体を撮影して得られた前記テレビ画面上に映る前記幾つかの異なる位置の被写体の画像の位置と、前記数値制御のテレビカメラを使って前記幾つかの異なる位置の被写体の前記画像を撮影した前記駆動機構の駆動位置の前記幾つかの異なる駆動数値を使って、前記テレビカメラを使って全ての位置の被写体を撮影して得られた前記テレビ画面上に映る前記全ての位置の被写体の画像の位置と、前記数値制御のテレビカメラを使って前記全ての位置の被写体の前記画像を撮影する前記駆動機構の駆動位置の前記全ての駆動数値を補間法を使って演算して取得し、前記飛行体に取り付けた前記テレビカメラを使って前記被写体を撮影して得られたテレビ画面上に映る前記被写体の画像の位置、又は、前記テレビ画面上の指示する画像の位置に、前記記載した方法を使って取得した前記関連付ける駆動数値を使って前記テレビカメラの駆動機構を駆動して撮影するテレビ画面を表示すことを特徴とする方法。
【請求項9】
請求項1から請求項7に記載の方法であって、前記数値制御のテレビカメラの撮影したテレビ画面上の中心の方向にレーザー距離計測記器の距離計測用のレーザー光を照射する様に、前記駆動機構に取り付けた前記レーザー距離計測記器を使って、前記数値制御のテレビカメラの撮影するテレビ画面の中心の方向に映る被写体との距離を計測することを特徴とする方法。
【請求項10】
請求項1から請求項7に記載の方法であって、前記テレビカメラを使って前記被写体を撮影して得られたテレビ画面上に映る前記被写体の画像の位置に、前記飛行体の下側に取り付けた駆動機構の数値制御の距離計測する方向を変える数値制御のレーザー距離計測機の計測用レーザー光を、前記被写体に照射した前記数値制御のレーザー距離計測機の駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の被写体を撮影して得られた前記テレビ画面上に映る前記幾つかの異なる位置の被写体の画像の位置と、前記レーザー距離計測機の計測用レーザー光を前記幾つかの異なる位置の被写体に照射した前記レーザー距離計測機の前記幾つかの異なる駆動位置の駆動数値を使って、前記テレビカメラを使って全ての位置の前記被写体を撮影して得られた前記テレビ画面上に映る前記全ての位置の被写体の画像の位置と、前記レーザー距離計測機の計測用レーザー光を前記全ての位置の被写体に照射した前記レーザー距離計測機の駆動機構の前記全ての駆動位置の駆動数値を補間法を使って演算して取得し、前記テレビカメラを使って前記被写体を撮影して得られたテレビ画面上に映る前記被写体の画像の位置、又は、前記テレビ画面上の前記指示した位置に、前記記載した方法を使って取得した前記関連付ける駆動数値を使って前記レーザー距離計測機の駆動機構の駆動して前記被写体との距離を計測することを特徴とする方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
ドローン飛行。
続きを表示(約 6,300 文字)
【背景技術】
【0002】
ドローンの飛行を手動操作に代わる自動離着陸及び自動追尾飛行。
飛行するドローンからのテレビカメラの自動撮影と、上空からレーザー自動距離計測。
【先行技術文献】
【特許文献】
【0003】
特許第6719494号
特許第7195093号
【発明の概要】
【0004】
飛行体を繋ぐ紐に組み込まれた電線を使って電源を供給したことによって発着する位置から上昇する飛行体のドローンにあって、ドローンを紐で繋ぎ留めて上昇させて、紐の長さの上空に飛行させる。
飛行するドローンを繋ぐ紐を巻取ることで、上昇しようとするドローンを強制的に着置する位置に着置させる。
ドローンの飛行体の操作をすることなく、ドローンへの電源を供給したことによって回転したプロペラの浮力によって上昇し様とするドローンを、ドローンを繋ぐ紐の巻取と巻戻しで自動的に離着陸させる。
紐に組み込まれた電線を使って、飛行するドローンに電源を供給して、ローンの長時間の飛行を可能にする。
上空に繋ぎ留めて飛行するドローンに取付けた、テレビカメラを使って、長時間の上空から周辺を撮影したテレビ画面上に映る画像を識別して、周辺の安全を確保する。
上空に繋ぎ留めて飛行するドローンに取り付けた、テレビカメラを使って、長時間の上空から撮影するテレビ画面を見て、作業機材をリモート操作する。
上空に繋ぎ留めて飛行するドローンに取り付けた、ライダー距離計測器を使って、上空から周辺の詳細な距離計測を続ける。
上空に繋ぎ留めて飛行するドローンに取り付けた、指向性マイクロホンを使って、上空から周辺の個々の音声の集音を続ける。
上空に繋ぎ留めて飛行するドローンに紐に組み込まれた電線を使って供給される電源を使って、飛行するドローンに取り付けたLEDの照明具を点灯させて周辺を照明を続ける。
ドローンを紐で繋ぎ留めて飛行することで、幾つかの規制から除かれる。
【発明が解決しようとする課題】
【0005】
ドローンの飛行体の飛行操作をせずに、ドローンの飛行を外部機材を使って自動的に離着陸及び追尾飛行させる。
【課題を解決するための手段】
【0006】
地上からドローンに繋がる紐に組み込まれた電線を使って電源を供給したことで自動的に地上から離陸するドローンを、地上の巻取機に前もって設定した紐の長さを巻戻して上昇させて、地上の上空に前もって設定した紐の長さの距離に繋ぎ留めて飛行させる。
地上の巻取機によって前もって設定した長さの紐の巻取って、電源を供給したことで上昇し様とするドローンを強制的に地上の巻取る位置に着陸させる方法で飛行体のドローンの飛行を自動化する。
【発明の効果】
【0007】
飛行体のドローンを自動的に飛行させることで、飛行体のドローンを使い易くする。
ドローンの飛行を紐で繋ぎ留めと規制を受けない。
地上の作業車両からドローンを自動的に離陸させて、作業車両の上空に自動的に追尾飛行させて、作業車両からの給電によって長時間の飛行をさせる。
長時間の飛行するドローンに取り付けたテレビカメラを使って撮影したテレビ画面上に映る画像を自動的に識別して、作業車両の安全な作業を自動的に長時間担保する。
長時間の略同じ上空を飛行するドローンに取り付けたテレビカメラを使って撮影した作業車両の略同じテレビ画面を見て、リモートの長時間の作業操作をする。
長時間の略同じ上空を飛行するドローンに取り付けた数値制御のテレビカメラを使って撮影した拡大した作業位置のテレビ画面を見て、リモートの長時間の作業操作をする。
長時間の略同じ上空を飛行するドローンに取り付けた数値制御のレーザー距離計測機を使って作業位置の距離を計測して、リモートの長時間の作業操作をする。
長時間の略同じ上空を飛行するドローンから作業位置を数値制御の指向性マイクロホンを使って作業位置からの音声を聞いて、リモートの長時間の作業操作をする。
長時間の略同じ上空を飛行するドローンに取り付けたLED光具の夜間照明でテレビカメラの撮影するテレビ画面を見て、24時間のリモートの作業操作を可能にする。
人間の立ち入れない災害場所のショベルカー、工事現場のブルトオーザー、及び、農作業のトラクター、及び、鉱山作業のトレーラー等に、インターネットを介して、24時間のリモートの作業操作を可能になる。
【図面の簡単な説明】
【0008】
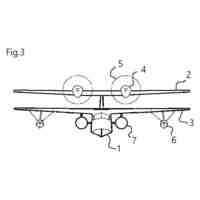
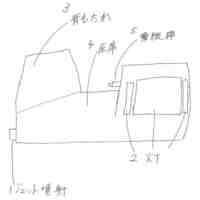
ドローンの上昇を前もって設定した紐の長さで繋ぎ留めて車両上空に、長時間の略同じ上空に維持させて、車両周辺をドローンに取り付けたテレビカメラを使って撮影する説明図。
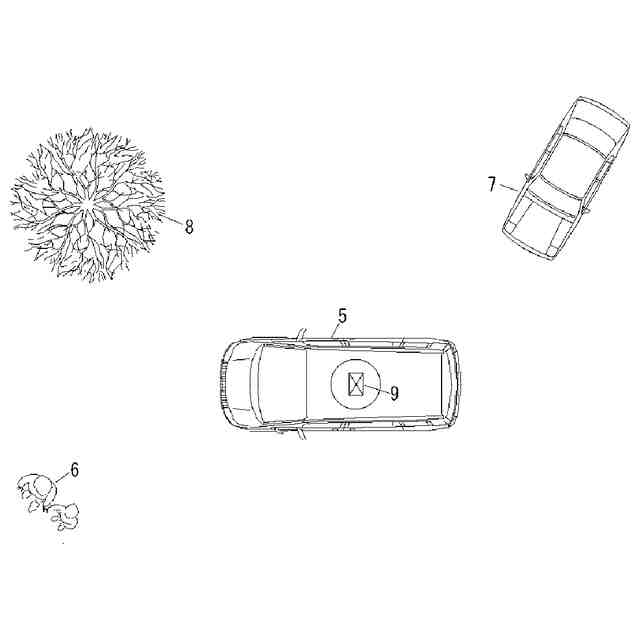
車両上空に前もって設定した紐の長さで繋ぎ留めて長時間、略同じ上空を維持させた飛行するドローンに取り付けた、テレビカメラを使って上空から撮影した車両周辺のテレビ画面の説明図。
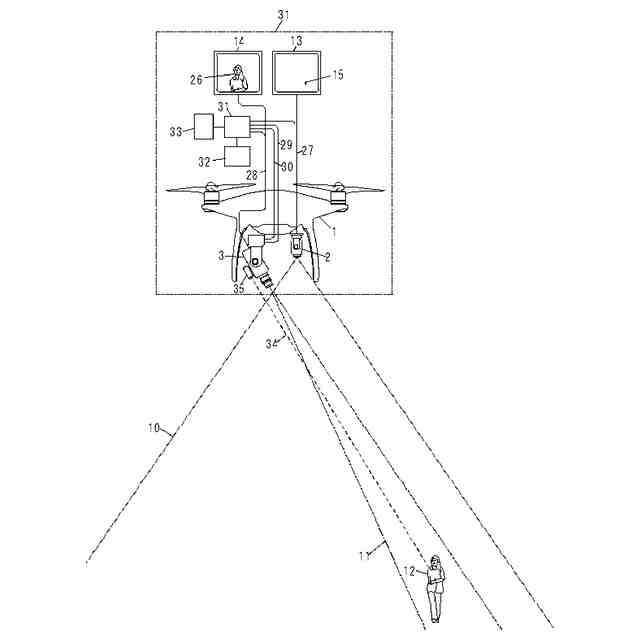
ドローンに取り付けたテレビカメラを使って撮影したテレビ画面に映る被写体の画像の位置に、数値制御のテレビカメラの駆動数値を補間法の演算式で取得する説明図。
前記数値制御のテレビカメラの駆動機構に、前記数値制御のテレビカメラの撮影する中心方向に距離計測用のレーザー光を照射する様に取り付けたレーザー距離計測器を使って、前記数値制御のテレビカメラの撮影する中心方向の被写体との距離を計測する説明図。
ドローンに取り付けたテレビカメラを使って撮影したテレビ画面に映る被写体の画像の位置に、数値制御のレーザー距離計測機の駆動数値を補間法の演算式で取得する説明図。
ドローンに取り付けたテレビカメラを使って撮影したテレビ画面に映る被写体の画像の位置に、数値制御の指向性マイクロホンの駆動数値を補間法の演算式で取得する説明図。
車両上空に長時間の略同じ上空を紐で繋ぎ留めて維持させた飛行するドローンに取り付けたテレビカメラを使って撮影したテレビ画面と、ドローンに取り付けた水平方向に回転する雲台にライダー距離計測器を取り付けて、上空から地上の垂直方向を継続的に詳細に計測する説明図。
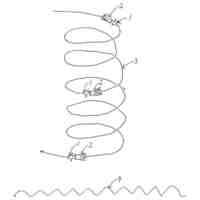
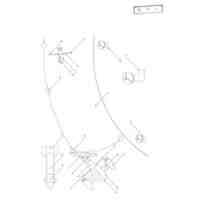
上昇し様とするドローンを繋ぎ留める細いワイヤーロープを、車両の上部に設置された巻取機から放って車両の上空に上昇させ、巻取機が巻き取って車両の上部に着置させる説明図。
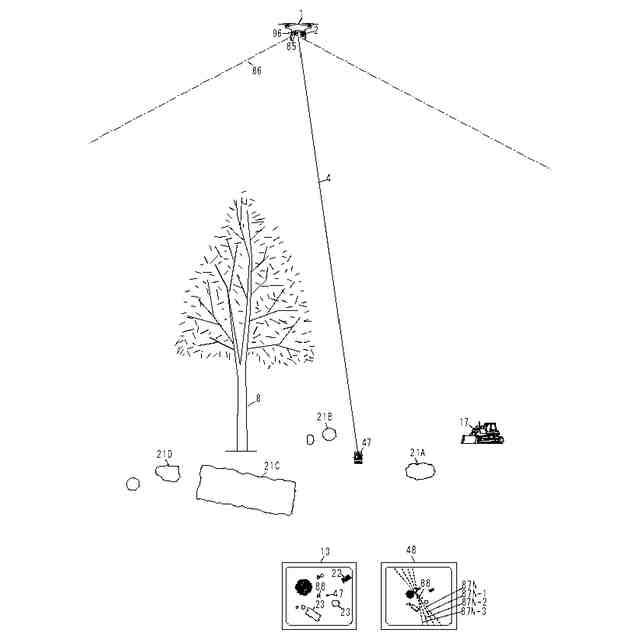
工事車両に繋がれて、工事現場の上空を長時間の略同じ上空を飛行するドローンに取付けた、テレビカメラを使って工事現場を撮影したテレビ画面上に安全作業範囲を設定し、テレビ画面に関連付けた数値制御のテレビカメラの撮影する作業位置のテレビ画面を、工事現場の映るテレビ画面上の作業位置に張り付けて表示する。ドローンに取付けたレーザー距離計測機を使って作業位置との距離を計測し、作業位置の高低差をテレビ画面上に映る作業位置の画像に標示して、上空からの作業位置の画面を見て工事車両の操作をする説明図
工事現場の上空に長時間の略同じ上空を繋ぎ留めて飛行するドローンに取り付けたテレビカメラを使って撮影した、テレビ画面上に映る工事車両の画像の映る位置から、それぞれの工事車両に作業範囲を設け、それぞれのテレビ画面上に映る工事車両の位置を、ドローンに取り付けたレーザー距離計測機を使って、それぞれの工事車両の位置を計測し、計測した距離を使ってそれぞれの工事車両の操作する説明図。
必要に応じて自動的に、上昇し様とするドローンを繋ぎ留める細いワイヤーロープを、工事車両の上部に設置された巻取機から放って車両の上空に上昇させ、巻取機が巻き取って工事車両の上部に着置させて、工事車両の移動に合わせて飛行するドローンを追尾飛行させる説明図。
飛行するドローンに取り付けた、飛行するドローンを繋ぎ留める紐の傾きの検出センサーを設けて紐の傾きを検出し、走行する車両の走行方向に合わせて、飛行するドローンを設定した傾きの走行方向の上空を追尾飛行させる説明図。
工事車両に長時間の略同じ上空を繋ぎ留めて飛行するドローンに取り付けたLEDの灯具を点灯させて工事車両の周辺を上空から照明し、飛行するドローンに取り付けたテレビカメラの撮影する上空からのテレビ画面を見ながら夜間の作業をする説明図。
船舶の周辺の海上を船舶からの設定した長さの紐に繋がるドローンに取り付けたテレビカメラの撮影したテレビ画面を見ながら接岸する説明図。
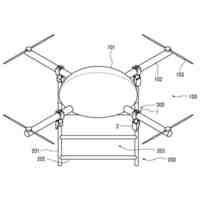
ドローンに繋がる紐を巻き取って、収納架の中に着置するドローンを、ドローンの上部に取り付けた、障害物の検知センサーを使って、上昇しようとするドローンの上空を確認して、上昇しようとするドローンに繋がる紐を巻取機が巻き解いて、上昇しようとするドローンを上空に飛行させて、ドローンに繋がる紐を使って上空に留めて飛行させる説明図。
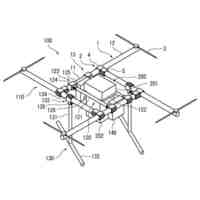
飛行するドローンを複数の紐に繋ぎ留めて、工事現場の上空に安定させて飛行する説明図。
ドローンに繋がる紐の巻取機を使って巻き取って、収納架の中に上昇しようとするドローンを着置させる説明図。
紐に繋ぎ留めて飛行するドローンに取付けた立体画面を撮影する2台のテレビカメラを、人間の視差を識別できる距離の位置に同じ方向を同じ画角で左右に取付けて、作業位置を上空から同期を合わせて撮影する。立体画面を撮影する2台のテレビカメラの画面を、相互にテレビ画面に映し、相互に同期させる立体眼鏡を使って、作業位置を上空から撮影した立体テレビ画面を見る説明図。
紐を使って飛行するドローンに取付けた、画素発光距離計測テレビカメラを使って、撮影したテレビ画面とテレビ画面上に映る作業位置の距離の信号を使って、テレビ画面上に映る作業位置の位置を、左右の目の視差の位置に相互に表示して、相互に同期して開閉する、立体眼鏡を使ってテレビ画面の作業位置を立体テレビ画面で見ることで、作業位置に臨場した作業操作をする説明図。
紐を使って飛行するドローンを作業位置の上空にと留めたドローンに取付けた、画素受光距離計測テレビカメラを使って、撮影したテレビ画面とテレビ画面上に映る作業位置の距離の信号を使って、テレビ画面をVRゴーグルの左右のテレビ画面上に映る作業位置の位置を、左右の目の視差の位置に表示した立体テレビ画面で見ることで、作業位置に臨場した作業操作をする説明図。
子供サッカー競技場の上空に紐を使って留めて飛行するドローンに取付けたテレビカメラの撮影したテレビ画面上に映る子供サッカー競技場の画像が、テレビ画面の中央に映る様に飛行するドローンの飛行方向を変えてテレビカメラの撮影したテレビ画面に子供サッカー競技場の画像を表示する説明図。
紐を使って飛行するドローンを子供サッカー競技場の上空にと留めたドローンに取付けたテレビカメラの撮影したテレビ画面上に映る中央の画像を画像認識させて、テレビ画面上に映る中央画像認識させた中央の画像が、数値制御のテレビカメラの撮影したテレビ画面の中心に写る様に、数値制御のテレビカメラの撮影する方向を変えて、常にテレビ画面の中心の位置に画像認識させた中央の画像が映る様に数値制御のテレビ画面を撮影する説明図。
飛行するドローンに繋がる多数の巻取機に巻かれた紐を使って飛行するドローンを子供サッカー競技場の上空に留めて飛行させて、ドローンに取付けたテレビカメラの撮影したテレビ画面上に映るサッカーボールの画像の位置に関連付けた、数値制御のテレビカメラの駆動数値を使って、サッカーボールの画像の位置を撮影する様に、多数の紐を巻き取る多数の巻取機を駆動する説明図。
飛行するドローンに取付けた垂直駆動機構を使ってテレビカメラの撮影する方向を下向きにする説明図。
【 実施例】
【0009】
ドローンを完全に自動的に運用する為に、ドローンを繋ぎ留める紐に組み込まれた電線から供給した電源を受けることで、ドローンを作業車両の位置から前記紐に繋かれて離陸して上昇する。
作業車両に前記紐で繋ぎ留めた前もって設定した紐の長さの飛行位置に上昇しようとするドローンを留めて飛行させる。
紐の長さの飛行位置に飛行するドローンを繋がれた前記紐を引き寄せて強制的に着陸させる。
自動的に上空に飛行させるドローンは、繋ぎ留める前記紐に組み込まれた電線によって電源を供給されて強く上昇しようとするドローンを、前記紐を使って強制適に引き留めることで、飛行するドローンの飛行位置を、引き留める前記紐の長さの上空に安定した飛行を続ける。
ドローンを繋ぎ留める紐に組み込まれた、電線を使ってドローンの飛行用の電源を給して、ドローンを繋ぎ留める前記紐の長さの上空に長時間の飛行をさせる。
ドローンを繋ぎ留める紐に組み込まれた電線を使ってドローンに取り付けたLEDの灯具用の電源を給して、ドローンを繋ぎ留める前記紐の長さの上空から地上方向を長時間の照明することができる。
前もって設定した紐の長さの上空を自動的に安定して飛行するドローンに、取り付けたテレビカメラを使っての地上方向を自動的に撮影する。
前記テレビカメラの撮影するテレビ画面上に映る画像を識別することで、作業車両の周辺の危険を事前に感知して、作業車両の作業を自動的に停止して事故の派生を防ぐことがでる。
【0010】
飛行するドローンに取り付けたテレビカメラを使って撮影したテレビ画面上に映る画像の作業位置に関連付けられた数値制御のテレビカメラの駆動機構を駆動する駆動数値を使って、前記画像の作業位置を拡大して撮影して画像を視認する。
前記テレビ画面上に映る画像の作業位置に関連付けられた、数値制御のレーザー距離計測機を駆動する駆動数値を使って画像の作業位置に距離計測用のレーザー光を照射して画像の作業位置との距離を計測して作業位置の地形を把握する。
前記テレビ画面上に映る画像の作業位置に関連付けられた、数値制御の指向性マイクロホンの駆動機構を駆動する駆動数値を使って前記画像の作業位置からの音声を聴取して作業状態を把握する。
複数の巻取機に巻かれた紐に繋がれた飛行するドローンに取付けたテレビカメラが撮影するテレビ画面上に映る被写体の画像の位置が、テレビ画面の中央に写る様に、複数の巻取機の巻く紐の長さを調整して、被写体に追尾して飛行するドローンから被写体を撮影する。
追尾して撮影するテレビ画面に映る被写体の画像の位置に、関連付けた数値制御のテレビカメラを使って被写体を追尾して撮影する。
工事現場を上空からテレビカメラを使って撮影したテレビ画面と、テレビ画面上で画像認識した画像と、認識した画像の位置を計測した距離及び方向を使って、工事現場をコンピューターに把握させた3次元の空間として、3次元の空間の駆動数値で駆動する作業車両による工事現場の作業をする。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
飛行体
11日前
個人
ドローン
8か月前
個人
人工台風
4か月前
個人
着火ドローン
5か月前
個人
救難消防飛行艇
6か月前
個人
AERO JET
1か月前
個人
ドローンシステム
10か月前
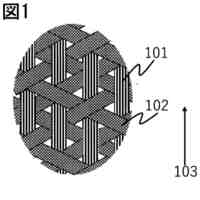
東レ株式会社
中空回転翼
5か月前
個人
無人空中移動体
1か月前
個人
動力原付きグライダー
2か月前
個人
飛行自動車vol.2
18日前
個人
導風板付き垂直離着陸機
3か月前
個人
連続回転可能な飛行機翼
6か月前
個人
陸海空用の乗り物
7か月前
個人
垂直離着陸機用エンジン改
9か月前
東レ株式会社
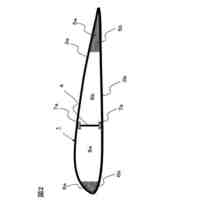
プロペラブレード
5か月前
東レ株式会社
プロペラブレード
5か月前
東レ株式会社
飛翔体用ブレード
1か月前
東レ株式会社
プロペラブレード
5か月前
個人
空飛ぶクルマ
5か月前
個人
空中移動システム
11か月前
個人
ドローンを自動離着陸する方法
10か月前
トヨタ自動車株式会社
ドローン
8か月前
個人
エアライナー全自動パラシュート
8か月前
合同会社アドエア
パラシュート射出装置
8か月前
個人
ヘリコプター駆動装置
5か月前
株式会社ACSL
システム
8か月前
株式会社ACSL
システム
8か月前
個人
搬送方法および搬送システム
5か月前
合同会社アドエア
飛行体の落下補助装置
11か月前
株式会社小糸製作所
飛行体ポート
6か月前
株式会社SUBARU
移動体
11か月前
個人
飛行体
5か月前
個人
飛行体
1か月前
個人
飛行体
4か月前
個人
パラボラ型スペースデブリカタパルト
5か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ