TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025042935
公報種別
公開特許公報(A)
公開日
2025-03-28
出願番号
2023150144
出願日
2023-09-15
発明の名称
無人機
出願人
ミネベアミツミ株式会社
代理人
個人
,
個人
主分類
B64U
30/29 20230101AFI20250321BHJP(航空機;飛行;宇宙工学)
要約
【課題】軽量化を実現することできる無人機を提供する。
【解決手段】無人機は、モータと、異なる2つの第1部分及び第2部分を有する外周面を有するアームと、前記モータと前記アームとを連結するアタッチメントと、を備える。前記アタッチメントは、前記異なる2つの第1部分及び第2部分を通過している。
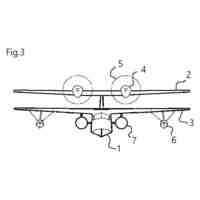
【選択図】図3
特許請求の範囲
【請求項1】
モータと、
異なる2つの第1部分及び第2部分を有する外周面を有するアームと、
前記モータと前記アームとを連結するアタッチメントと、を備え、
前記アタッチメントは、前記異なる2つの第1部分及び第2部分を通過している、無人機。
続きを表示(約 430 文字)
【請求項2】
前記アタッチメントは、前記異なる2つの第1部分及び第2部分を通過するロッドを備える、請求項1に記載の無人機。
【請求項3】
前記モータは、前記第1部分に前記アタッチメントを介して対向している、請求項2に記載の無人機。
【請求項4】
前記アタッチメントは、前記第1部分に固定される第1フランジと、前記第2部分に固定される第2フランジと、を備え、
前記ロッドと前記第1フランジ及び前記第2フランジとは連結されている、請求項3に記載の無人機。
【請求項5】
前記アタッチメントはリングを備え、
前記リングは前記アームの外周面に取り付けられている、請求項4に記載の無人機。
【請求項6】
前記モータは前記第1フランジに連結されている、請求項5に記載の無人機。
【請求項7】
前記モータの回転軸線は前記リングを通過する、請求項5に記載の無人機。
発明の詳細な説明
【技術分野】
【0001】
本発明は無人機に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば特許文献1に開示された無人機では、アームの先端面に取り付けられたプロペラ取付部すなわちアタッチメントにモータ及びプロペラが取り付けられている。アタッチメントはアームの先端面から外側に延在している。プロペラの回転によって推力や振動が生成される。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/146431号
【発明の概要】
【発明が解決しようとする課題】
【0004】
こうした推力や振動による力のモーメントはアタッチメントに作用する。この力のモーメントに耐え得るため、アタッチメントにはある程度の強度が必要とされる。強度の確保のためにリブ等が追加されると、アタッチメントの重量すなわち無人機の重量が増加する。
【0005】
そこで、本発明は、軽量化を実現することできる無人機を提供することを課題の1つとする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る無人機は、モータと、異なる2つの第1部分及び第2部分を有する外周面を有するアームと、前記モータと前記アームとを連結するアタッチメントと、を備え、前記アタッチメントは、前記異なる2つの第1部分及び第2部分を通過している。
【図面の簡単な説明】
【0007】
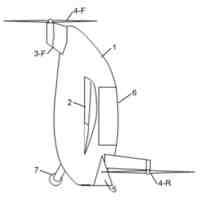
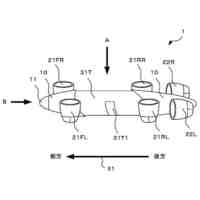
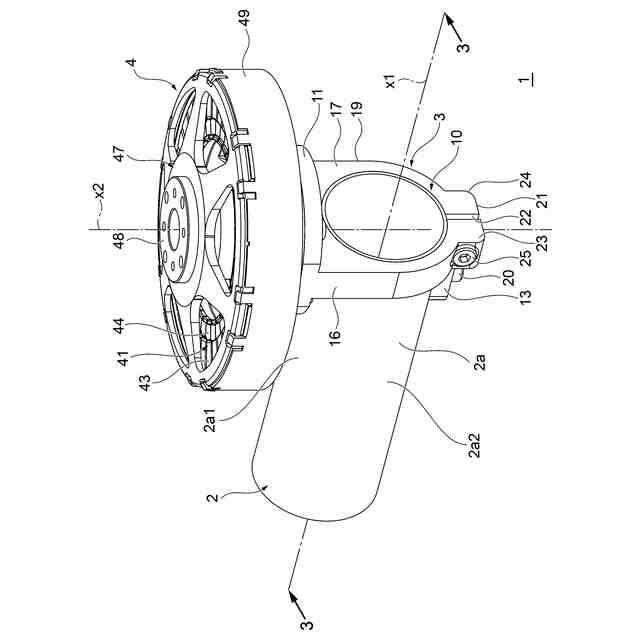
本発明の第1実施形態に係る無人機1の構造を概略的に示す斜視図である。
本発明の第1実施形態に係る無人機1の構造を概略的に示す斜視図である。
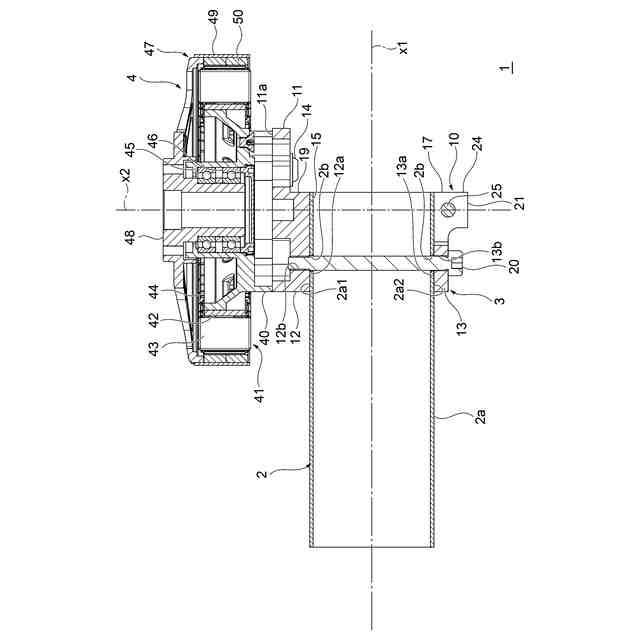
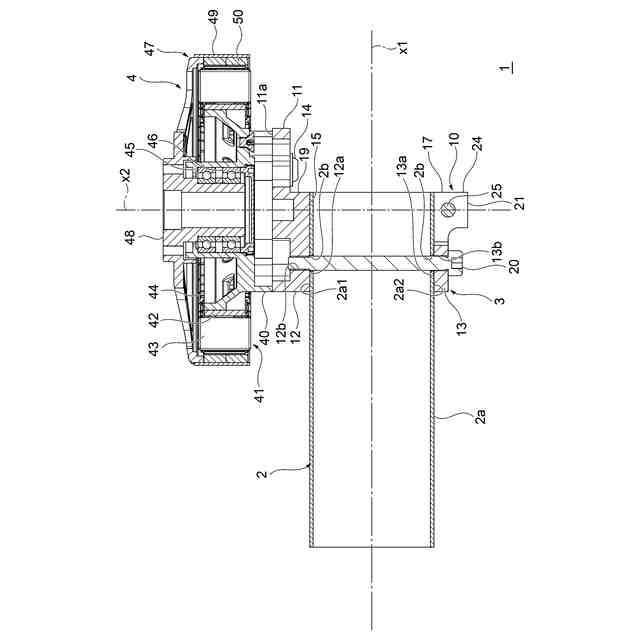
図2の3-3線に沿った断面図である。
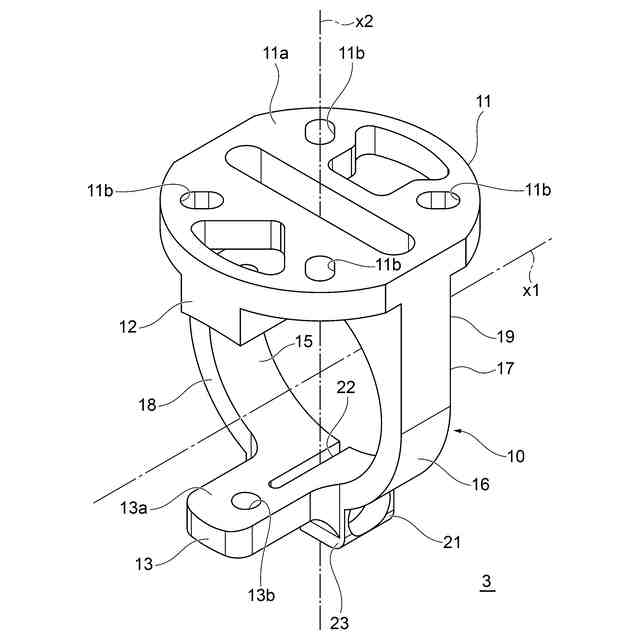
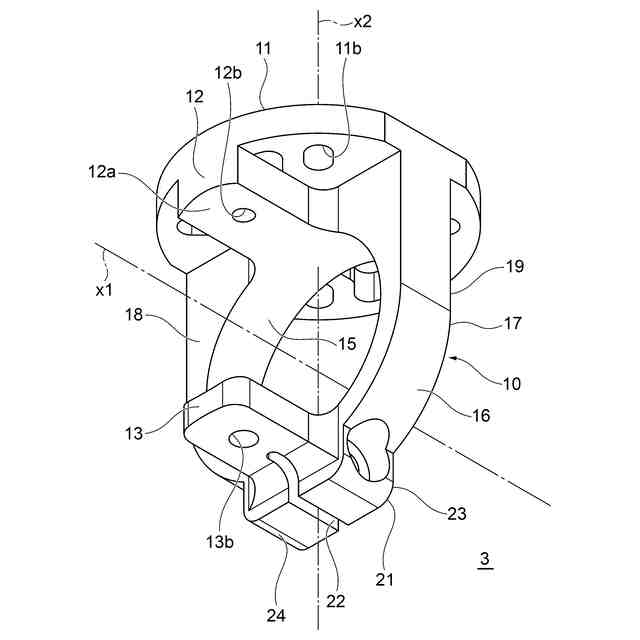
一具体例に係るアタッチメント3の構造を概略的に示す斜視図である。
一具体例に係るアタッチメント3の構造を概略的に示す斜視図である。
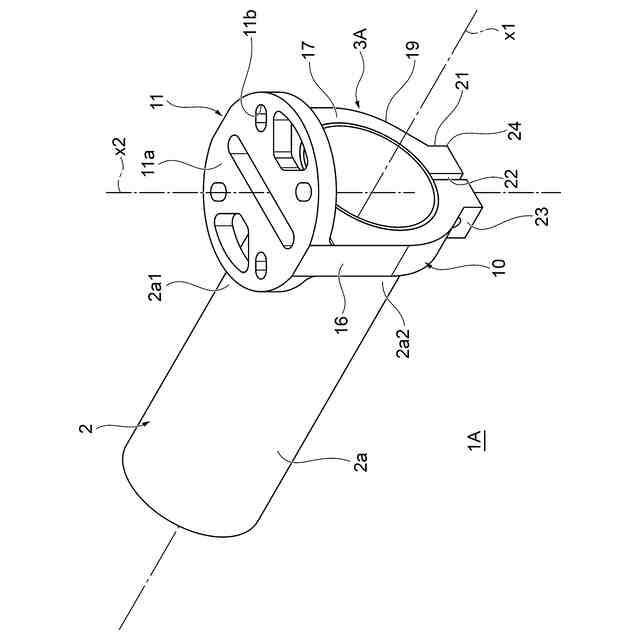
本発明の第2実施形態に係る無人機1Aの構造を概略的に示す斜視図である。
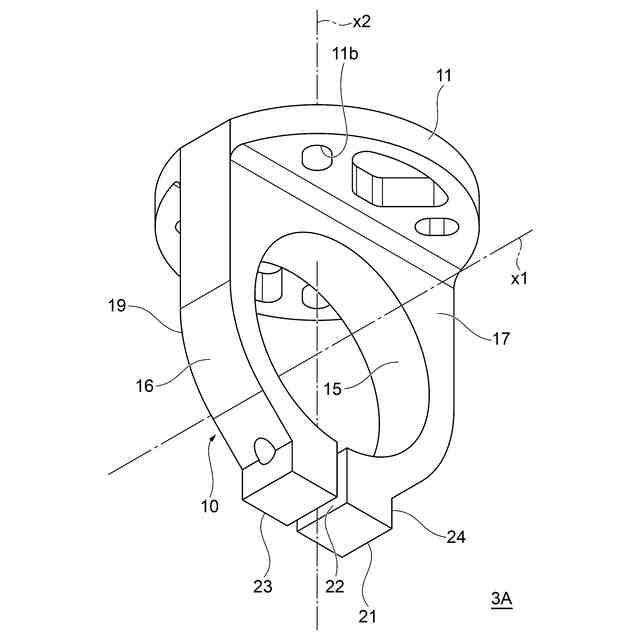
別の具体例に係るアタッチメント3Aの構造を概略的に示す斜視図である。
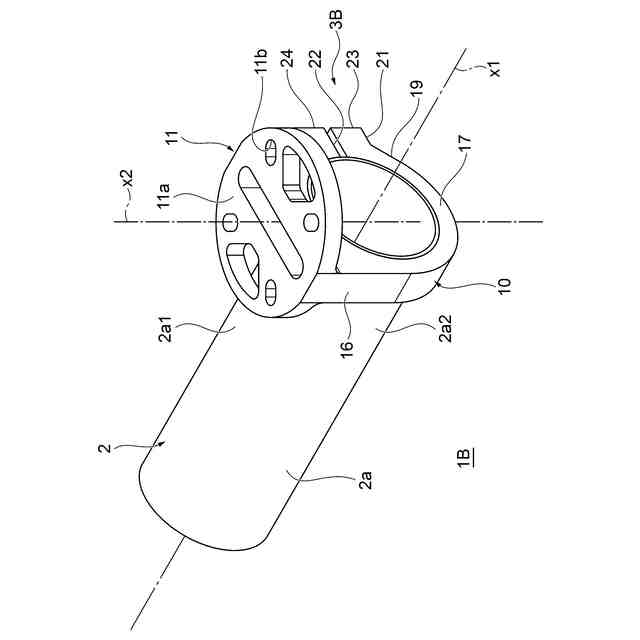
本発明の第3実施形態に係る無人機1Bの構造を概略的に示す斜視図である。
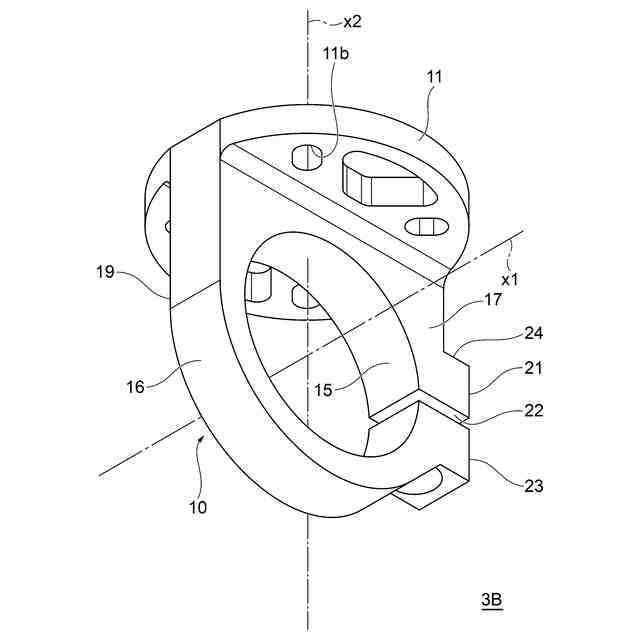
別の具体例に係るアタッチメント3Bの構造を概略的に示す斜視図である。
本発明の第4実施形態に係る無人機1Cの構造を概略的に示す斜視図である。
別の具体例に係るアタッチメント3Cの構造を概略的に示す斜視図である。
本発明の第5実施形態に係る無人機1Dの構造を概略的に示す斜視図である。
本発明の第5実施形態に係る無人機1Dの構造を概略的に示す斜視図である。
図12の14-14線に沿った断面図である。
本発明の第6実施形態に係る無人機1Eの構造を概略的に示す斜視図である。
【発明を実施するための形態】
【0008】
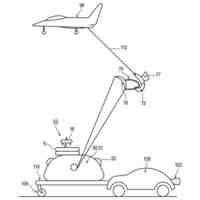
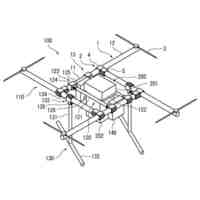
以下、添付図面を参照して、本発明の実施形態について説明する。図1及び図2は、本発明の第1実施形態に係る無人機1の構造を概略的に示す斜視図である。無人機1は、複数の推進装置を搭載したいわゆるマルチコプタである。無人機1は、本体(図示せず)と、複数のアーム2と、各アーム2の先端に配置されたアタッチメント3と、アタッチメント3に取り付けられたモータ4と、モータ4に取り付けられたプロペラ(図示せず)と、を備えている。モータ4及びプロペラが無人機1の推進装置を構成する。なお、図1及び図2には1つのアーム2の先端が拡大して示されている。
【0009】
無人機1の本体内には、無人機1の駆動を制御する制御装置やバッテリ、各種のセンサ、カメラ等の部品が組み込まれる。この本体から、複数本、例えば、3本、4本、6本又は8本のアーム2が例えば放射状に延在する。この例では、アーム2は、中心軸線x1を中心とする円筒状の金属材料から形成される。また、アーム2の先端は開放されている。アーム2の内部空間には配線(図示せず)等が収容される。なお、アーム2は、円筒状以外の形状を有してもよい。また、1本のアーム2が本体から直接延在している必要はなく、例えば、H型等のように、2つ先端を有するT字状のアームが用いられてもよい。
【0010】
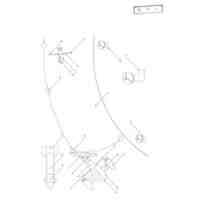
アーム2の先端にはアタッチメント3が取り付けられている。アタッチメント3は、環状のリング10と、円盤状の取付台11と、第1フランジ12及び第2フランジ13と、を有している。リング10はアーム2の外周面2aに取り付けられる。取付台11はリング10の上端に一体的に形成される。取付台11の上面に規定された面(以下、「支持面」と呼称する)11aに回転軸線x2を規定するモータ4が支持される。モータ4の回転軸線x2はアーム2の中心軸線x1に交差する。この例では、回転軸線x2は中心軸線x1に直交する。モータ4の上端にプロペラが回転軸線x2回りに回転可能に支持される。なお、アタッチメント3の詳細については後述する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
飛行体
19日前
個人
人工台風
4か月前
個人
ドローン
8か月前
個人
着火ドローン
6か月前
個人
救難消防飛行艇
6か月前
個人
AERO JET
1か月前
個人
ドローンシステム
10か月前
東レ株式会社
中空回転翼
5か月前
個人
動力原付きグライダー
2か月前
個人
無人空中移動体
1か月前
個人
飛行自動車vol.2
26日前
個人
導風板付き垂直離着陸機
4か月前
個人
陸海空用の乗り物
7か月前
個人
連続回転可能な飛行機翼
6か月前
東レ株式会社
プロペラブレード
5か月前
東レ株式会社
飛翔体用ブレード
1か月前
個人
空飛ぶクルマ
5か月前
東レ株式会社
プロペラブレード
5か月前
個人
垂直離着陸機用エンジン改
10か月前
東レ株式会社
プロペラブレード
5か月前
個人
ドローンを自動離着陸する方法
10か月前
個人
空中移動システム
11か月前
トヨタ自動車株式会社
ドローン
8か月前
個人
エアライナー全自動パラシュート
8か月前
合同会社アドエア
飛行体の落下補助装置
11か月前
個人
ヘリコプター駆動装置
6か月前
株式会社小糸製作所
飛行体ポート
6か月前
株式会社ACSL
システム
9か月前
株式会社ACSL
システム
9か月前
合同会社アドエア
パラシュート射出装置
8か月前
個人
搬送方法および搬送システム
6か月前
個人
飛行体
5か月前
個人
飛行体
5か月前
個人
パラボラ型スペースデブリカタパルト
5か月前
株式会社SUBARU
移動体
11か月前
個人
垂直離着陸機用ガスタービンエンジン
10か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ