TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025029873
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023134746
出願日
2023-08-22
発明の名称
システム
出願人
株式会社ACSL
代理人
個人
,
個人
主分類
B64U
20/80 20230101AFI20250228BHJP(航空機;飛行;宇宙工学)
要約
【課題】飛行記録を確度高く作成することができるシステムを提供する。
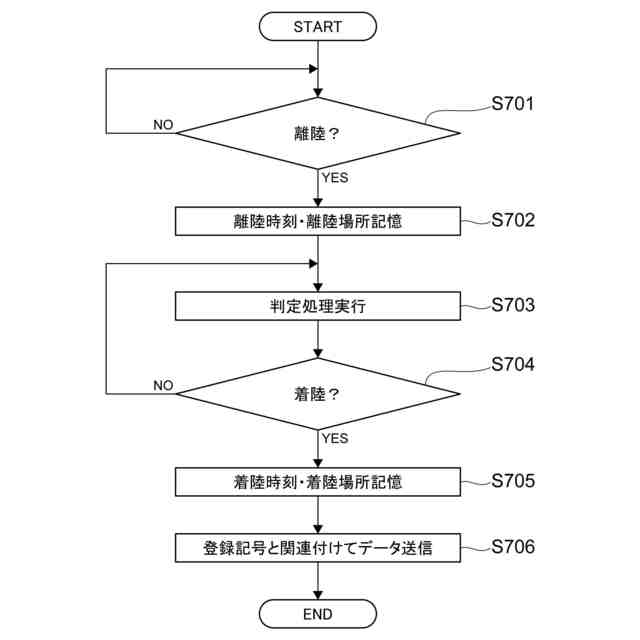
【解決手段】無人航空機の飛行記録を作成するシステムであって、前記無人航空機が離陸したか否かを判定する判定手段と、前記判定手段が離陸したと判定したときの時刻を前記無人航空機が離陸したときの時刻である離陸推定時刻として推定する推定手段と、前記推定手段が推定した前記離陸推定時刻が、前記飛行記録における離陸時刻を記入すべき所定欄に記入されるように、当該離陸推定時刻と当該所定欄とを関連付けて記憶する記憶手段と、を備えるシステム。
【選択図】図7
特許請求の範囲
【請求項1】
無人航空機の飛行記録を作成するシステムであって、
前記無人航空機が離陸したか否かを判定する判定手段と、
前記判定手段が離陸したと判定したときの時刻を前記無人航空機が離陸したときの時刻である離陸推定時刻として推定する推定手段と、
前記推定手段が推定した前記離陸推定時刻が、前記飛行記録における離陸時刻を記入すべき所定欄に記入されるように、当該離陸推定時刻と当該所定欄とを関連付けて記憶する記憶手段と、
を備えるシステム。
続きを表示(約 890 文字)
【請求項2】
前記判定手段は、前記無人航空機が備える地面に対する当該無人航空機の距離を計測するセンサの出力値を用いて把握した距離が、予め定められた基準値以上になり、ロータを駆動するモータへの電流供給指令値が予め定められた値以上となったときに、当該無人航空機が離陸したと判定する、
請求項1に記載のシステム。
【請求項3】
前記無人航空機が、前記判定手段及び前記推定手段を有し、
前記無人航空機と予め定められた通信手段を介して通信可能な端末が、前記記憶手段を有し、
前記無人航空機は、前記推定手段が推定した前記離陸推定時刻を、前記通信手段を介して前記端末に送信する、
請求項1又は2に記載のシステム。
【請求項4】
無人航空機の飛行記録を作成するシステムであって、
前記無人航空機が着陸したか否かを判定する判定手段と、
前記判定手段が着陸したと判定したときの時刻を前記無人航空機が着陸したときの時刻である着陸推定時刻として推定する推定手段と、
前記推定手段が推定した前記着陸推定時刻が、前記飛行記録における着陸時刻を記入すべき所定欄に記入されるように、当該着陸推定時刻と当該所定欄とを関連付けて記憶する記憶手段と、
を備えるシステム。
【請求項5】
前記判定手段は、前記無人航空機が備える地面に対する当該無人航空機の距離を計測するセンサの出力値を用いて把握した距離が、予め定められた基準値未満になり、ロータを駆動するモータへの電流供給指令値が予め定められた値未満となったときに着陸と判定する、
請求項4に記載のシステム。
【請求項6】
前記無人航空機が、前記判定手段及び前記推定手段を有し、
前記無人航空機と予め定められた通信手段を介して通信可能な端末が、前記記憶手段を有し、
前記無人航空機は、前記推定手段が推定した前記着陸推定時刻を、前記通信手段を介して前記端末に送信する、
請求項4又は5に記載のシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、システムに関する。
続きを表示(約 3,000 文字)
【背景技術】
【0002】
航空法の規定により、無人航空機を飛行させる者は、飛行日誌を備え、記載しなければならない。飛行日誌は、飛行記録、日常点検記録及び点検整備記録から構成され、各々の記載内容等については、国土交通省が発行している、非特許文献1の無人航空機の飛行日誌の取扱要領に記載されている。
【先行技術文献】
【特許文献】
【0003】
無人航空機の飛行日誌の取扱要領[2023年3月7日検索]、インターネット、〈URL:https://www.mlit.go.jp/koku/content/001574394.pdf〉
【発明の概要】
【発明が解決しようとする課題】
【0004】
飛行記録には、無人航空機の離陸場所、着陸場所、離陸時刻、着陸時刻、飛行の安全に影響のあった事項等の複数の事項を記入する必要があるため、これらの記入を人為的な作業に委ねると、記入漏れが生じるおそれがある。また、例えば離陸時刻を記入すべき欄に、無人航空機が実際に離陸した時刻とは異なる時刻が記入される等、記入内容に誤りが生じるおそれがある。
本発明は、飛行記録を確度高く作成することができるシステムを提供することを目的とする。
【課題を解決するための手段】
【0005】
かかる目的のもと完成させた本発明は、無人航空機の飛行記録を作成するシステムであって、前記無人航空機が離陸したか否かを判定する判定手段と、前記判定手段が離陸したと判定したときの時刻を前記無人航空機が離陸したときの時刻である離陸推定時刻として推定する推定手段と、前記推定手段が推定した前記離陸推定時刻が、前記飛行記録における離陸時刻を記入すべき所定欄に記入されるように、当該離陸推定時刻と当該所定欄とを関連付けて記憶する記憶手段と、を備えるシステムである。
ここで、前記判定手段は、前記無人航空機が備える地面に対する当該無人航空機の距離を計測するセンサの出力値を用いて把握した距離が、予め定められた基準値以上になり、ロータを駆動するモータへの電流供給指令値が予め定められた値以上となったときに、当該無人航空機が離陸したと判定しても良い。
また、前記無人航空機が、前記判定手段及び前記推定手段を有し、前記無人航空機と予め定められた通信手段を介して通信可能な端末が、前記記憶手段を有し、前記無人航空機は、前記推定手段が推定した前記離陸推定時刻を、前記通信手段を介して前記端末に送信しても良い。
また、他の観点から捉えると、本発明は、無人航空機の飛行記録を作成するシステムであって、前記無人航空機が着陸したか否かを判定する判定手段と、前記判定手段が着陸したと判定したときの時刻を前記無人航空機が着陸したときの時刻である着陸推定時刻として推定する推定手段と、前記推定手段が推定した前記着陸推定時刻が、前記飛行記録における着陸時刻を記入すべき所定欄に記入されるように、当該着陸推定時刻と当該所定欄とを関連付けて記憶する記憶手段と、を備えるシステムである。
ここで、前記判定手段は、前記無人航空機が備える地面に対する当該無人航空機の距離を計測するセンサの出力値を用いて把握した距離が、予め定められた基準値未満になり、ロータを駆動するモータへの電流供給指令値が予め定められた値未満となったときに着陸と判定しても良い。
また、前記無人航空機が、前記判定手段及び前記推定手段を有し、前記無人航空機と予め定められた通信手段を介して通信可能な端末が、前記記憶手段を有し、前記無人航空機は、前記推定手段が推定した前記着陸推定時刻を、前記通信手段を介して前記端末に送信しても良い。
【発明の効果】
【0006】
本発明によれば、飛行記録を確度高く作成することができるシステムを提供することができる。
【図面の簡単な説明】
【0007】
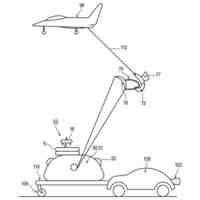
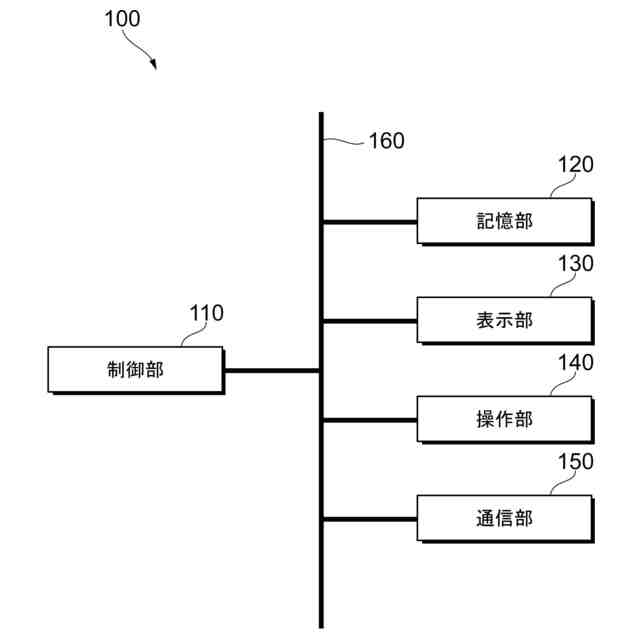
飛行記録作成システムの概略構成の一例を示す図である。
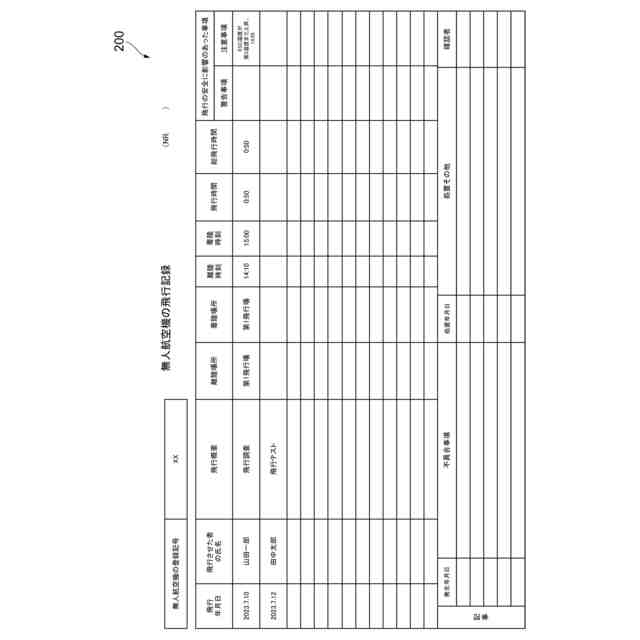
飛行記録の一例を示す図である。
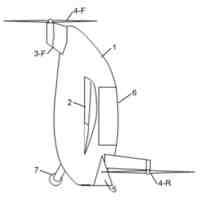
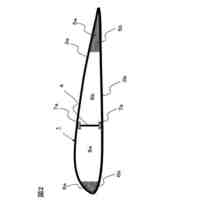
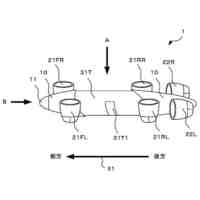
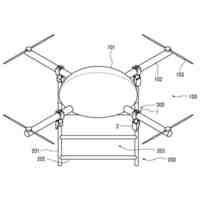
無人航空機を下方から見た概略構成の一例を示す斜視図である。
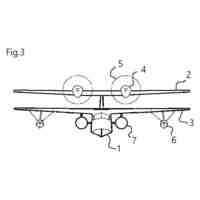
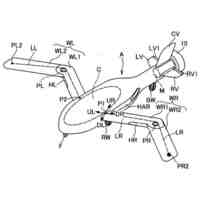
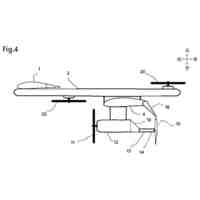
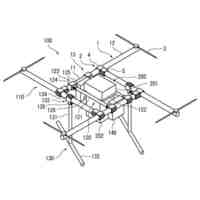
無人航空機の概略構成の一例を示す図である。
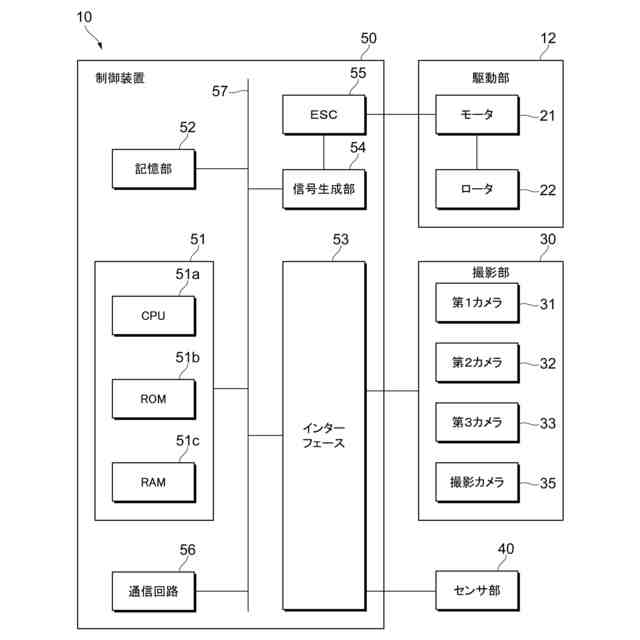
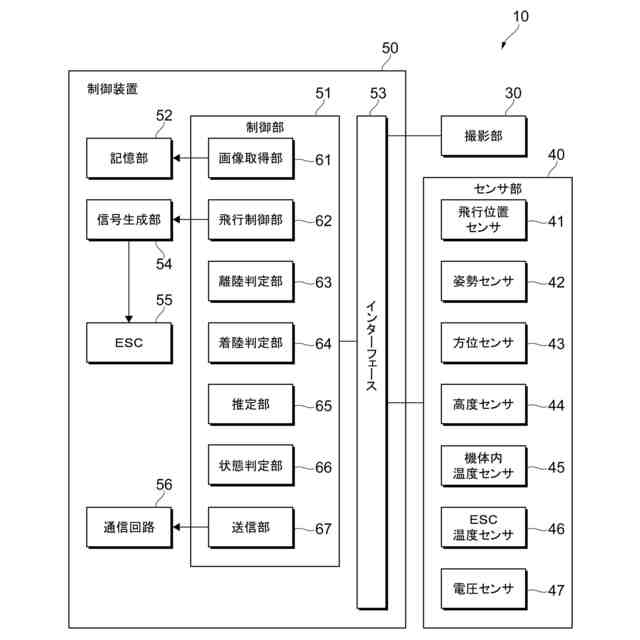
無人航空機のブロック図の一例を示す図である。
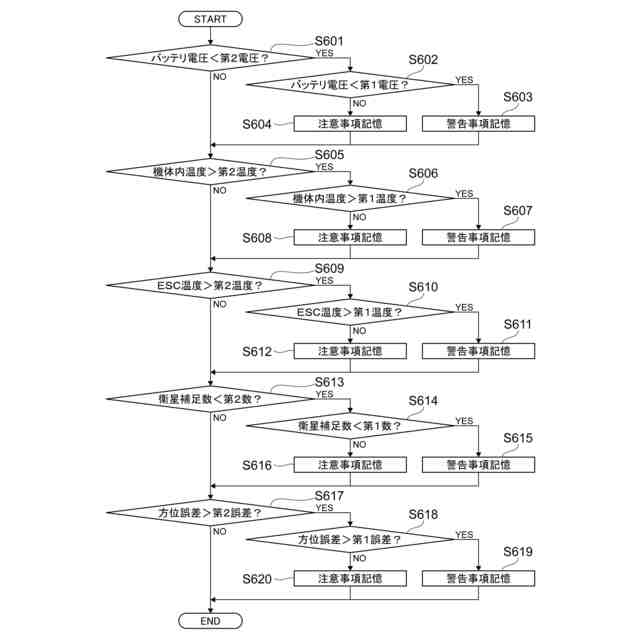
状態判定部が行う判定処理を示すフローチャートである。
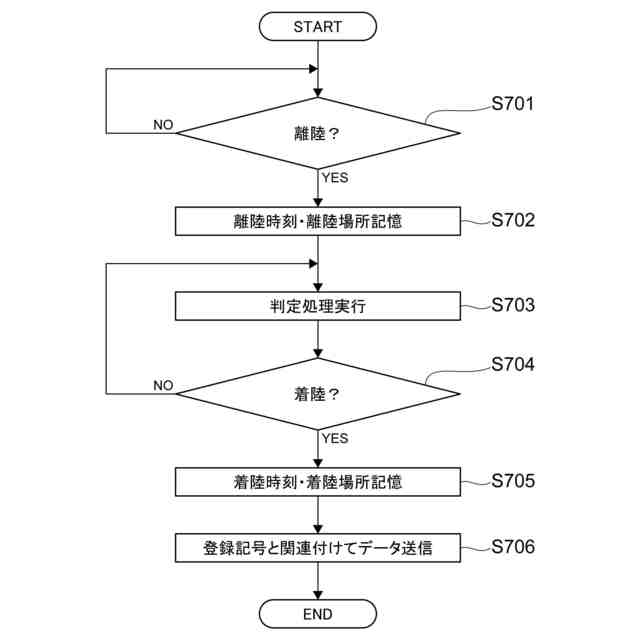
制御部が行う送信処理を示すフローチャートの一例である。
情報処理装置の概略構成の一例を示す図である。
記憶部に記憶された事項が記入された飛行記録の一例を示す図である。
制御部が行う記憶処理を示すフローチャートの一例である。
記憶部に記憶された事項が記入された飛行記録の一例を示す図である。
【発明を実施するための形態】
【0008】
以下、添付図面を参照して、本発明の実施形態について詳細に説明する。
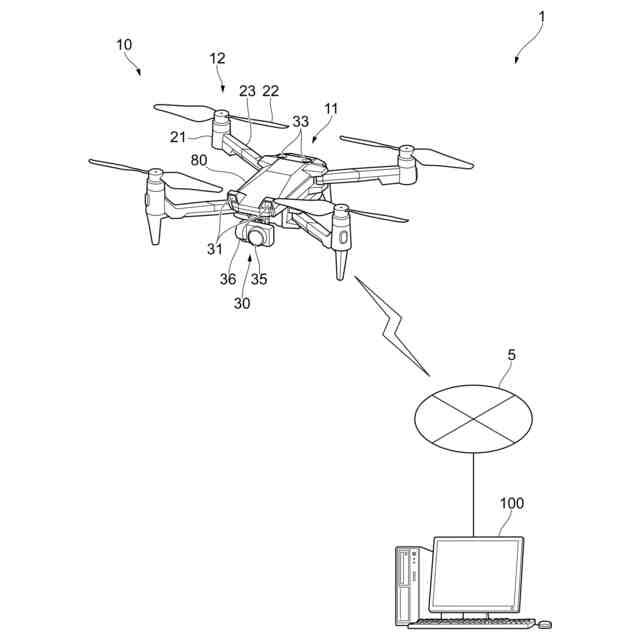
図1は、飛行記録作成システム1の概略構成の一例を示す図である。
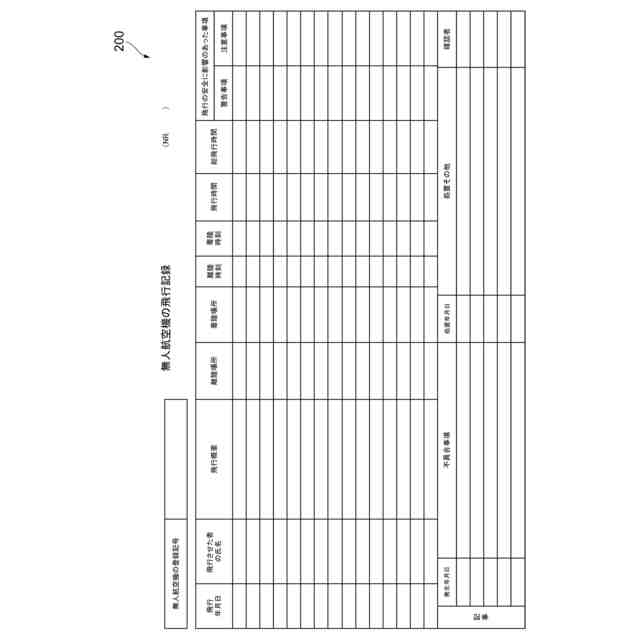
図2は、飛行記録の一例を示す図である。
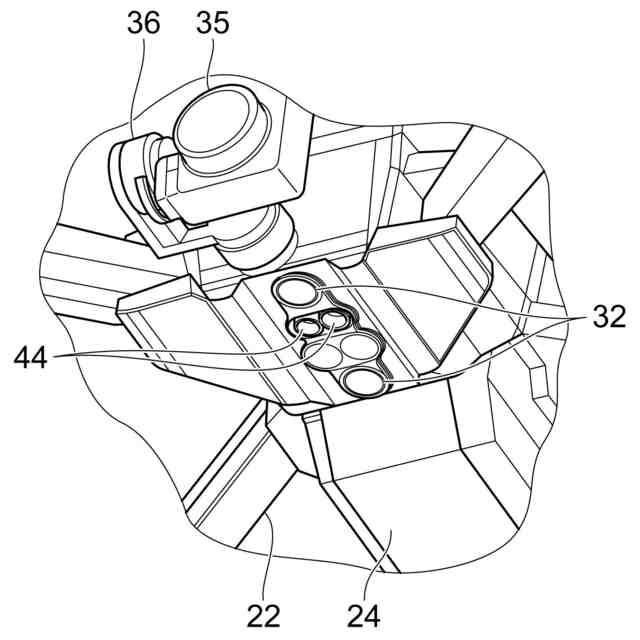
図3は、無人航空機10を下方から見た概略構成の一例を示す斜視図である。
図4は、無人航空機10の概略構成の一例を示す図である。
図5は、無人航空機10のブロック図の一例を示す図である。
飛行記録作成システム1(以下、単に「システム1」と称する場合がある。)は、無人航空機10の飛行の実績を記録する飛行記録200を作成するシステムである。飛行記録200は、無人航空機10を飛行させる者(以下「操縦者」と称する場合がある。)が備え、記載しなければならない飛行日誌の一部である。飛行日誌には、飛行記録200の他に、操縦者が無人航空機10を飛行させる前に行う飛行前点検等の日常点検に係る結果について記載する日常点検記録や、無人航空機10の使用者に課せられる安全基準への適合義務を履行した記録について記載する点検整備記録が含まれる。
【0009】
飛行記録200には、図2に示すように、「無人航空機の登録記号」、「飛行年月日」、「飛行させた者の氏名」、「飛行概要」、「離陸場所」、「着陸場所」、「離陸時刻」、「着陸時刻」、「飛行時間」、「総飛行時間」、「飛行の安全に影響のあった事項」を記載する欄がそれぞれ設けられている。「飛行概要」の欄には、例えば、撮影、点検、調査等、飛行の目的を記載することを例示することができる。「飛行の安全に影響のあった事項」の欄に記載する内容等については後で詳述する。
【0010】
システム1は、無人航空機10と、情報処理装置100とを備える。無人航空機10と情報処理装置100とは、ネットワーク5を介して互いに通信を行うことが可能となっている。ネットワーク5は、装置間のデータ通信に用いられる通信ネットワークであれば特に限定されず、例えばインターネット、LAN(Local Area Network)、WAN(Wide Area Network)であることを例示することができる。データ通信に用いられる通信回線は、有線か無線かを問わず、これらを併用しても良い。無線LANは、例えばブルートゥース(登録商標)やWiFi(登録商標)であることを例示することができる。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
飛行体
11日前
個人
ドローン
8か月前
個人
人工台風
4か月前
個人
着火ドローン
5か月前
個人
救難消防飛行艇
6か月前
個人
AERO JET
1か月前
個人
ドローンシステム
10か月前
東レ株式会社
中空回転翼
5か月前
個人
無人空中移動体
1か月前
個人
動力原付きグライダー
2か月前
個人
飛行自動車vol.2
18日前
個人
導風板付き垂直離着陸機
3か月前
個人
連続回転可能な飛行機翼
6か月前
個人
陸海空用の乗り物
7か月前
個人
垂直離着陸機用エンジン改
9か月前
東レ株式会社
プロペラブレード
5か月前
東レ株式会社
プロペラブレード
5か月前
東レ株式会社
飛翔体用ブレード
1か月前
東レ株式会社
プロペラブレード
5か月前
個人
空飛ぶクルマ
5か月前
個人
空中移動システム
11か月前
個人
ドローンを自動離着陸する方法
10か月前
トヨタ自動車株式会社
ドローン
8か月前
個人
エアライナー全自動パラシュート
8か月前
合同会社アドエア
パラシュート射出装置
8か月前
個人
ヘリコプター駆動装置
5か月前
株式会社ACSL
システム
8か月前
株式会社ACSL
システム
8か月前
個人
搬送方法および搬送システム
5か月前
合同会社アドエア
飛行体の落下補助装置
11か月前
株式会社小糸製作所
飛行体ポート
6か月前
株式会社SUBARU
移動体
11か月前
個人
飛行体
5か月前
個人
飛行体
1か月前
個人
飛行体
4か月前
個人
パラボラ型スペースデブリカタパルト
5か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ