TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024124586
公報種別
公開特許公報(A)
公開日
2024-09-13
出願番号
2023032342
出願日
2023-03-03
発明の名称
ドローンの計測操作方法3
出願人
個人
代理人
主分類
B64U
70/97 20230101AFI20240906BHJP(航空機;飛行;宇宙工学)
要約
【課題】上空を飛行するドローンの着陸を自動化する方法を提供する。
【解決手段】飛行するドローンから地上の着陸位置の距離及び方向を継続的に計測する。計測した飛行するドローンから地上の着陸位置までの距離及び方向を使って、飛行するドローンの計測するGPS測位値から、地上の着陸位置のGPS測位値を演算する。飛行するドローンを、ドローンの計測するGPS測位で飛行させて、地上の着陸位置の演算したGPS測位値の着陸位置に着陸させる。
【選択図】図11
特許請求の範囲
【請求項1】
飛行するドローンに、計測する位置を撮影する様に取り付けた、テレビカメラを使って、前記計測する位置を撮影したテレビカメラ画面上に写る前記計測する位置の画像の位置に、前記ドローンに、前記計測する位置に向けて計測用のレーザー光を照射する様に取り付けた、数値制御のレーザー距離計測機の計測用のレーザー光を照射方向を変える駆動機構を駆動して、前記計測用のレーザー光を前記計測する位置に照射する、前記駆動機構の駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる前記計測する位置を撮影した、前記テレビカメラ画面上に写る前記幾つかの異なる前記計測する位置の画像の位置に、前記計測用のレーザー光を前記幾つかの異なる計測する位置に照射する、前記駆動機構の前記幾つかの異なる駆動位置の駆動数値と使って、前記テレビカメラを使って全ての前記計測する位置を撮影した、前記テレビカメラ画面上に写る前記全ての前記計測する位置の画像の位置と、前記計測用のレーザー光を前記全ての計測する位置に照射する、前記駆動機構の前記全ての駆動位置の駆動数値を関連付ける数値を、補間法等の計算式で演算して取得し、前記テレビカメラを使って前記計測する位置を撮影したテレビカメラ画面上に写る前記画像の位置に、前記記載した方法で関連付けた、前記数値制御のレーザー距離計測機の前記駆動機構を駆動して、前記計測用のレーザー光を照射して距離及び方向を計測して、前記距離を減ずる様に、前記ドローンを前記計測する位置に着陸させる方法、及び、前記方向を合わせる様に、前記ドローンを飛行させる方法、及び、前記ドローンから前記計測する位置までの前記計測した前記距離及び方向を使って、前記ドローンの測位するGPS測位値から前記計測する位置のGPS測位値を演算し、前記演算した前記着陸位置のGPS測位値に合わせる様に、飛行する前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて、前記計測する位置に着陸させる方法、及び、前記ドローンから前記計測する位置までの設定した距離及び方向を使って、前記ドローンのGPS測位値から前記計測する位置のGPS測位値を演算し、前記演算した前記計測する位置のGPS測位値に合わせる様に、飛行する前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記設定した距離及び方向の位置に飛行させる方法、の何れかの方法を特徴とする方法。
続きを表示(約 8,700 文字)
【請求項2】
飛行する前記ドローンを計測する位置から、前記ドローンを前記テレビカメラを使って撮影したテレビカメラ画面上に写る、前記ドローンの画像の位置と、前記ドローンに前記数値制御のレーザー距離計測機の計測用のレーザー光を照射方向を変える駆動機構を駆動して、前記計測用のレーザー光を前記ドローンに照射した前記駆動機構の駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記ドローンを撮影した前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記ドローンの画像の位置に、前記計測用のレーザー光を前記幾つかの異なる位置の前記ドローンに照射する前記駆動機構の前記幾つかの異なる駆動位置の駆動数値を使って、前記テレビカメラを使って撮影した前記テレビカメラ画面上に写る全ての飛行する位置の前記ドローンの画像の位置と、前記計測用のレーザー光を、前記全ての位置の前記ドローンに照射する前記駆動機構の前記全ての駆動位置の駆動数値とを関連付ける数値を、補間法等の計算式で演算して取得し、前記テレビカメラを使って飛行する前記ドローンを撮影したテレビカメラ画面上に写る前記ドローンの画像の位置に前記記載した方法で関連付けた、前記数値制御のレーザー距離計測機の前記駆動機構を駆動して、前記計測用のレーザー光を照射して距離及び方向を計測して飛行する前記ドローンを前記距離を減ずる様に飛行させて前記計測する位置に着陸させる方法、及び、前記方向を合わせる様に、前記ドローンを飛行させる方法、及び、前記計測する位置から前記ドローンまでの前記計測した前記距離及び方向を使って、前記計測する位置の測位したGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記計測する位置に着陸させる方法、及び、前記計測する位置から前記ドローンまでの設定した距離及び方向を使って、前記計測する位置の測位したGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記設定した距離及び方向に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項3】
飛行する前記ドローンを計測する位置から前記ドローンを前記テレビカメラを使って撮影した前記テレビカメラ画面上に写る前記ドローンの画像の周辺の位置と、前記周辺の位置に前記数値制御のレーザー距離計測機の計測用のレーザー光を照射方向を変える駆動機構を駆動して前記計測用のレーザー光を前記周辺の位置にスキャーンして照射した、前記駆動機構の駆動位置の前記スキャーンする駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記ドローンを撮影した前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記周辺の位置に、前記計測用のレーザー光を前記幾つかの異なる位置の前記周辺の位置にスキャーンして照射する前記駆動機構の前記幾つかの異なる駆動位置の前記スキャーンする駆動数値と使って、前記テレビカメラを使って全ての位置の前記ドローンを撮影した、前記テレビカメラ画面上に写る全ての位置の前記周辺の位置と、前記計測用のレーザー光を、前記全ての位置の前記ドローンの前記周辺の位置に前記スキャーンして照射する前記駆動機構の前記全ての前記スキャーンする駆動位置の駆動数値を関連付ける数値を補間法等の計算式で演算して取得し、前記テレビカメラを使って、飛行する前記ドローンを撮影したテレビカメラ画面上に写る前記ドローンの画像の位置に、前記記載した方法で関連付けた前記数値制御のレーザー距離計測機の前記駆動機構を前記スキャーンする駆動をして、前記計測用のレーザー光を前記スキャーンする照射をして、前記ドローンとの距離及び方向を計測して飛行する前記ドローンを前記距離を減ずる様に飛行させて前記計測する位置に着陸させる方法、及び、前記方向を合わせる様に、前記ドローンを飛行させる方法、及び、前記計測する位置から前記ドローンまでの前記計測した前記距離及び方向を使って前記計測する位置の測位したGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記計測する位置に着陸させる方法、及び、前記計測する位置から前記ドローンまでの設定した距離及び方向を使って、前記計測する位置のGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記設定した距離及び方向に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項4】
飛行する前記ドローンの計測する位置から飛行する前記ドローンを前記テレビカメラを使って撮影したテレビカメラ画面上に写る、前記ドローンの画像の位置と、前記ドローンを数値制御のテレビカメラを使って撮影したカメラカメラ画面上に写る前記ドローンの画像の位置が、前記テレビカメラ画面の中心の位置に写る様に前記数値制御のテレビカメラを使って撮影方向を変える駆動機構を駆動した駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記ドローンを撮影した、前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記ドローンの画像の位置と、前記数値制御のテレビカメラを使って撮影したテレビカメラ画面上に写る前記幾つかの異なる飛行する位置の前記ドローンの前記画像の位置が、前記数値制御のテレビカメラ画面の前記中心の位置に写る様に、前記数値制御のテレビカメラの駆動機構を駆動した駆動位置の駆動数値を使って、前記テレビカメラを使って全ての位置の前記ドローンを撮影した前記テレビカメラ画面上に写る前記全ての位置の前記ドローンの画像の位置と、前記数値制御のテレビカメラを使って撮影したテレビカメラ画面上に写る前記全ての前記ドローンの画像の位置が、前記数値制御のテレビカメラ画面の中心の前記位置に写る様に前記数値制御のテレビカメラの駆動機構を駆動した前記全ての駆動位置の駆動数値を関連付ける数値を補間法等の計算式で演算して取得し、前記テレビカメラを使って前記ドローンを撮影した、テレビカメラ画面上に写る前記ドローンの画像の位置に、前記記載した方法で関連付けた前記数値制御のテレビカメラの駆動機構の前記駆動数値で駆動して、前記数値制御のテレビカメラ画面の前記中心の位置に写る前記ドローンを撮影した前記駆動機構にレーザー距離計測器の計測用のレーザー光を前記中心の位置方向の前記ドローンに照射する様に取り付けた、前記レーザー距離計測器を使って前記ドローンまでの距離を計測して、前記距離を減ずる様に、前記ドローンを飛行させて前記着陸位置へ着陸させる方法、及び、前記数値制御のテレビカメラ画面の前記中心の位置に写る様に、前記ドローンを飛行させる方法、及び、前記計測する位置から前記ドローンまでの前記計測した前記距離及び方向を使って、前記計測する位置の測位するGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に、前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記計測する位置に着陸させる方法、及び、前記計測する位置から前記ドローンまでの設定した距離及び方向を使って、前記計測する位置の測位するGPS測位値から前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記設定した距離及び方向に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項5】
GPS測位値で飛行する前記ドローンの飛行する計測する位置を前記ドローンに取付けた、前記テレビカメラを使って撮影したテレビカメラ画面上に写る前記計測する位置の画像の位置と、前記ドローンに、前記計測する位置に向けて計測用のレーザー光を照射する様に取り付けた数値制御のレーザー距離計測機の計測用のレーザー光を照射方向を変える駆動機構を駆動して前記計測用のレーザー光を前記計測する位置に照射する前記駆動機構の駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記計測する位置を撮影した前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記計測する位置の画像の位置に、前記計測用のレーザー光を前記幾つかの異なる位置の前記計測する位置に照射する、前記駆動機構の前記幾つかの異なる駆動位置の駆動数値を使って、前記テレビカメラを使って全ての位置の前記計測する位置を撮影した、前記テレビカメラ画面上に写る前記全ての位置の計測する位置の画像の位置と、前記計測用のレーザー光を前記全ての位置の計測する位置に照射する前記駆動機構の前記全ての駆動位置の駆動数値を関連付ける数値を補間法等の計算式で演算して取得し、前記テレビカメラを使って前記計測する位置を撮影したテレビカメラ画面上に写る前記画像の位置に、前記記載した方法で関連付けた前記数値制御のレーザー距離計測機の前記駆動機構を前記駆動数値で駆動して、前記計測用のレーザー光を前記計測する位置に照射して距離及び方向を計測して、前記距離を減ずる様に、前記ドローンを前記計測する位置へ飛行させる方法、及び、前記方向を合わせる様に、前記ドローンを前記計測する位置方向へ飛行させる方法、及び、前記ドローンから前記計測する位置までの前記計測した前記距離及び方向を使って、前記ドローンの測位するGPS測位値から前記計測する位置のGPS測位値を演算し、前記演算した前記計測する位置のGPS測位値に合わせる様に、前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記計測する位置に飛行させる方法、及び、前記ドローンから前記計測する位置までの設定した距離及び方向を使って、前記ドローンの測位するGPS測位値から前記計測する位置のGPS測位値を演算し、前記演算した前記計測する位置のGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて、前記設定した距離及び方向の前記計測する位置に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項6】
GPS測位値を計測して飛行する前記ドローンの飛行する計測する位置を撮影する様に前記ドローンに取付けた前記テレビカメラを使って撮影したテレビカメラ画面上の前記計測する位置の画像の位置と、前記計測する位置を撮影する様に前記ドローンに取付けた、前記数値制御のテレビカメラを使って撮影方向を変える駆動機構を駆動して撮影した前記数値制御のテレビカメラ画面上に写る前記計測する位置の画像の位置が中心の位置に写る様に前記駆動機構の駆動位置の駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記計測する位置を撮影した前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記計測する位置の画像の位置と、前記数値制御のテレビカメラを使って撮影したテレビカメラ画面上に写る前記幾つかの異なる位置の前記計測する位置の画像の位置が、前記数値制御のテレビカメラ画面の前記中心の位置に写る様に前記駆動機構を駆動した駆動位置の駆動数値とを使って、前記テレビカメラを使って全ての位置の前記計測する位置を撮影した前記テレビカメラ画面上に写る前記全ての位置の前記計測する位置の画像の位置と、前記数値制御のテレビカメラを使って撮影したテレビカメラ画面上に写る前記全ての位置の前記計測する位置の画像の位置が、前記数値制御のテレビカメラ画面の前記中心の位置に写る様に撮影した、前記数値制御のテレビカメラの駆動機構を駆動した前記全ての駆動位置の駆動数値を関連付ける数値を補間法等の計算式で演算して取得し、前記テレビカメラを使って撮影したテレビカメラ画面上の前記計測する位置の画像の位置に前記関連付けた、前記数値制御のテレビカメラの駆動機構を前記駆動数値を使って駆動して撮影した、前記駆動機構に取り付けたレーザー距離計測器を使って前記ドローンから前記計測する位置までの距離及び方向を計測し、前記距離を減ずる様に、前記ドローンを前記計測する位置へ飛行させる方法、及び、前記方向を合わせる様に、前記ドローンを前記計測する位置へ飛行させる方法、及び、前記計測した、又は、設定した距離及び方向を使って、前記ドローンの測位するGPS測位値からの前記計測する位置のGPS測位値を演算して、前記演算した計測する位置のGPS測位を使って前記演算した前記計測する位置のGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記計測する位置に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項7】
GPS測位値を計測して飛行する前記ドローンから計測する位置を前記ドローンに取付けた前記数値制御のテレビカメラを使って画角を広げて撮影したテレビカメラ画面上に写る前記計測する位置の画像の位置と、前記数値制御のテレビカメラを使って撮影方向を変える駆動機構を駆動して撮影した前記数値制御のテレビカメラ画面上に写る前記計測する位置の画像の位置が、前記テレビカメラ画面の中心の位置に写る様に撮影した前記駆動機構を駆動した駆動数値を関連付け、前記テレビカメラを使って幾つかの異なる位置の前記計測する位置を撮影した前記テレビカメラ画面上に写る前記幾つかの異なる位置の前記計測する位置の画像の位置と、前記数値制御のテレビカメラの駆動機構を駆動して撮影した前記数値制御のテレビカメラ画面上に写る前記幾つかの異なる位置の前記計測する位置の画像の位置が前記テレビカメラ画面の前記中心の位置に写る様に撮影した前記駆動機構を駆動した前記幾つかの異なる駆動数値を使って、前記テレビカメラを使って全ての位置の前記計測する位置を撮影した前記テレビカメラ画面上に写る前記全ての位置の前記計測する位置の画像の位置と、前記数値制御のテレビカメラの駆動機構を駆動して撮影したテレビカメラ画面上に写る前記全ての位置の前記計測する位置の画像の位置が、前記テレビカメラ画面の前記中心の位置に写る様に撮影する前記駆動機構を駆動した前記全ての駆動数値を関連付ける数値を補間法等の計算式で演算して取得し、前記駆動機構に計測用のレーザー光を前記中心の位置の方向に向けて照射する様に取り付けたレーザー距離計測器を使って、前記ドローンから前記計測する位置までの距離及び方向を計測し、前記距離を減ずる様に、前記ドローンを前記計測する位置へ飛行させる方法、及び、前記方向を合わせる様に、前記ドローンを前記計測する位置へ飛行させる方法、及び、前記計測した、又は、設定した距離及び方向を使って、前記ドローンの飛行位置を測位するGPS測位値からの前記計測する位置のGPS測位値を演算して、前記演算した前記計測する位置のGPS測位値に合わせる様に、前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて、前記計測する位置に飛行させる方法、の何れかの方法を特徴とする方法。
【請求項8】
請求項1から7の何れかに記載にあって、GPS測位値を測位する位置から、前記ドローンを飛行させる前記計測する位置を、前記テレビカメラを使って撮影したテレビカメラ画面上に写る前記計測する位置の画像の位置に、前記記載した方法で関連付けた前記数値制御のテレビカメラを使って撮影して得られた前記数値制御のテレビカメラ画面上の前記計測する位置の画像の位置が、前記画面上の前記中心の位置に写る様に前記駆動機構の駆動位置を修正して撮影し、前記修正された前記駆動数値に前記記載した方法で関連付けた前記テレビカメラを使って撮影したテレビカメラ画面上に写る前記計測する位置の画像の位置を前記修正し、前記修正された前記画像の位置に前記記載した方法で関連付けた前記レーザー距離計測機の計測用のレーザー光を前記計測する位置に前記修正して照射して前記GPS測位値を測位する位置から前記計測する位置までの距離及び方向を前記修正して計測し、前記計測した、又は、設定した距離及び方向を使って前記GPS測位値を測位する位置からの前記計測する位置のGPS測位値を演算し、前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記演算したGPS測位値の前記計測する位置に飛行させる方法を特徴とする方法。
【請求項9】
請求項1から7の何れかに記載にあって、GPS測位値を測位する位置から前記テレビカメラを使って上空を飛行する前記ドローンを撮影したテレビカメラ画面上に写る前記ドローンの画像の位置に、前記記載した方法で関連付けた前記数値制御のレーザー距離計測機の計測用のレーザー光を前記ドローンに照射して前記測位する位置から前記ドローンとの距離及び方向を計測し、前記計測した距離及び方向、又は、操作する距離及び方向を使って前記測位する位置の前記GPS測位値からの前記ドローンのGPS測位値を演算し、前記ドローンを前記ドローンが測位するGPS測位値を使って飛行させて前記演算した前記GPS測位値に合わせる様に飛行させる方法、及び、前記飛行させるドローンに取り付けた前記テレビカメラを使って何れかの位置を撮影したテレビカメラ画面上に写る前記何れかの位置の画像の位置に、前記記載した方法で関連付けた前記飛行させるドローンに取り付けた前記数値制御のレーザー距離計測機の計測用のレーザー光を前記何れか位置に照射して前記飛行させるドローンから前記何れか位置との距離及び方向を計測する方法、及び、前記飛行させるドローンに取り付けた前記テレビカメラを使って何れかの位置を撮影したテレビカメラ画面上に写る前記何れかの位置の画像の位置に前記記載した方法で関連付けた、前記飛行させるドローンに取り付けた前記数値制御のテレビカメラ画面上の前記何れかの位置の画像の位置が、前記画面上の前記中心の位置に写る様に前記数値制御のテレビカメラの駆動機構を駆動して前記何れかの位置を撮影する方法、及び、前記計測した距離及び方向を使って前記数値制御のテレビカメラを使って撮影する画角、及び、焦点の駆動機構を駆動して前記何れか位置を撮影する方法、の何れかの方法を特徴とする方法。
【請求項10】
請求項1から7の何れかに記載にあって、GPS測位値を計測しながら走行する車両に取り付けた前記テレビカメラを使って上空を飛行する前記ドローンを撮影したテレビカメラ画面上に写る前記ドローンの画像の位置に、前記走行する車両に取り付けた前記数値制御のレーザー距離計測機の駆動機構の前記記載した方法で関連付けた駆動数値を使って前記駆動機構を駆動して計測用のレーザー光を前記ドローンに照射して前記走行する車両の計測する位置から前記ドローンまでの距離及び方向を計測し、前記計測した、又は、設定する距離及び方向を使って前記走行する車両の測位するGPS測位値からの前記ドローンのGPS測位値を演算し、前記演算した前記ドローンのGPS測位値に合わせる様に前記ドローンを前記ドローンがGPS測位値を測位する方法で飛行させて前記ドローンを前記走行に追尾飛行させる方法、及び、前記追尾飛行するドローンに取り付けた前記テレビカメラを使って地上の計測する位置を撮影したテレビカメラ画面上に写る前記地上の計測する位置の画像の位置に、前記追尾飛行するドローンに取り付けた前記数値制御のレーザー距離計測機の駆動機構の前記記載する方法で関連付けた駆動数値を使って前記駆動機構を駆動して前記計測用のレーザー光を前記地上の計測する位置に照射して、前記追尾飛行するドローンから前記地上の計測する位置との距離及び方向を計測する方法、及び、前記追尾飛行するドローンから前記走行する車両の位置との距離及び方向を計測する方法、及び、前記走行する車両から前記追尾飛行するドローンを介して、前記地上の計測する位置との距離及び方向を計測する方法、及び、前記地上の計測する位置から前記追尾飛行するドローンを介して前記走行する車両位置との距離及び方向を計測する方法、及び、前記追尾飛行するドローンに取り付けた前記テレビカメラを使って前記地上の計測する位置を撮影したテレビカメラ画面上に写る前記地上の計測する位置の画像の位置に前記追尾飛行するドローンに取り付けた前記数値制御のテレビカメラの駆動機構の前記記載する方法で関連付けた駆動数値を使って撮影する方法、及び、前記数値制御のテレビカメラ画面上の前記地上の計測する位置の画像の位置が、前記中心の位置、又は、設定する位置に写る様に前記修正して前記地上の計測する位置を撮影する方法、の何れかの方法を特徴する方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本願発明は、ドローンの離陸及び着陸及び飛行を、測計した距離を使って自動的に行うものである。
続きを表示(約 6,000 文字)
【背景技術】
【0002】
ドローンまでの及びドローンからの距離計測技術
【先行技術文献】
【特許文献】
【0003】
特許第5508308号、特許第5547605号、特許第5547670号、特許第6719494号
【非特許文献】
【0004】
特願2018-039078号、特願2018-174323号
[未公開関連技術の開示]
特願2021-102081号
【発明を実施するための形態】
【0005】
本願発明は、本願発明者が、既に取得した、特許から派生したものである。特許第5508308号は、テレビカメラで撮影したテレビカメラ画面の位置を、幾つかの数値制御の駆動機構の駆動数値に関連付けて、その何れかの数値制御の駆動機構の駆動数値を使って、その幾つかの数値制御の駆動機構を駆動する発明である。特許第5547605号は、テレビカメラで撮影したテレビカメラ画面の位置に関連付けた、数値制御のテレビカメラの駆動数値を使って撮影する発明である。特許第5547670号は、数値制御のテレビカメラで撮影したテレビカメラ画面の位置を、その数値制御のテレビカメラの駆動数値に関連付けた、数値制御のテレビカメラの駆動数値を使って撮影する発明である。特許第6719494号は、テレビカメラで撮影したテレビカメラ画面の位置を、数値制御のレーザー距離計測機の駆動数値に関連付けて、距離を計測する発明である。
文中の記載事項の説明
【0006】
ドローンは、市販の汎用機。不審ドローンは、ドローンを含む不審飛行物体。レーザー距離計測器は、市販の汎用機。数値制御レーザー距離計測機は、ミラー駆動機構の数値制御レーザー距離計測機を含む、計測方向を数値制御機構の駆動数値で制御される距離計測機。テレビカメラは、市販の汎用機、画面の画像を位置の出力する機能があるとしても説明している。数値制御テレビカメラは、撮影方向と撮影画角等を、ミラー駆動機構の数値制御テレビカメラを含む、数値制御機構の駆動数値で制御されるテレビカメラ。テレビカメラ画面は、モニター画面上の位置として説明している。画像の位置は、テレビカメラ画面の画像の位置、座標位置、走査時間位置として説明している。差を演算は、テレビカメラ画面上の異なる座標位置の差の演算として説明している。画像認識は、テレビカメラ画面から画像認識の手法を使って認識した画像認識である。計測する位置は、飛行移動するドローンを計測する位置、又は、計測地点。固定する位置は、飛行移動するドローンに対しての固定位置、又は、計測目標位置、絶対方位位置である。追尾、テレビカメラ画面で画像検出した画像、又は、画像認識して識別した画像の画面上の座標位置に、関連付けられて、数値制御の駆動機構を追尾駆動、及び、テレビカメラ画面上の画像の移動に追尾撮影する機構。GPS測位値、GPS測位を含む衛星を測位で得られた測位値した数値。
【発明の概要】
【0007】
テレビカメラの撮影したテレビカメラ画面に写る、飛行するドローンとの距離を計測して、計測した距離を使って飛行するドローンを操作する。
【発明が解決しようとする課題】
【0008】
飛行するドローンとの距離を自動的に計測する方法。
【発明の効果】
【0009】
飛行ドローンとの距離を計測して、ドローンの飛行、及び、離着陸を自動化する。
【図面の簡単な説明】
【0010】
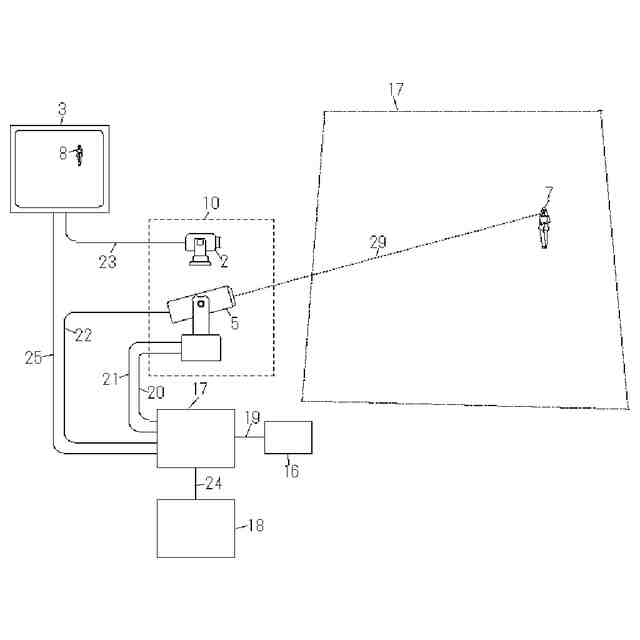
7 被写体を2テレビカメラを使って撮影した画面から、画像認識の手法を使って画像を識別した、3テレビカメラ画面上の8 被写体の画像の位置に関連付けた、5数値制御のレーザー距離計測機の駆動機構の駆動数値を使って、駆動機構を駆動して、7被写体との距離を追尾計測する説明図。
7被写体を2テレビカメラを使って撮影した画面から、画像認識の手法を使って画像を識別した3テレビカメラ画面上の8 被写体の画像の位置に、13数値制御のテレビカメラの駆動機構の関連付けた駆動数値を使って駆動して、14テレビカメラ画面中央の位置に被写体の画像を追尾撮影する説明図。
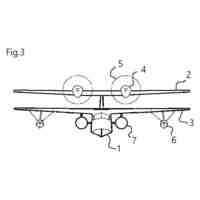
図3は、7 被写体を13数値制御のテレビカメラの画角を広角にして、撮影した32テレビカメラ画面Aから画像認識の手法を使って画像を識別した32数値制御のテレビカメラ画面A上の8 被写体の画像が、33数値制御のテレビカメラ画面B上の6テレビカメラ画面中央に写る様に13数値制御のテレビカメラを駆動し、13数値制御のテレビカメラの画角を狭角にして撮影した、34数値制御のテレビカメラ画面Cの画面から画像認識の手法を使って画像を識別した39詳細な画像を撮影する説明図。
上空を飛行する1ドローンに取り付けた2テレビカメラを使って、11地上の位置を撮影した3テレビカメラ画面から画像認識の手法を使って識別した地上の12地上の位置の画像の位置に、1ドローンに下向きに取り付けた5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って前記駆動機構を駆動して、1ドローンから11地上の位置までの距離及び方向を継続的に追尾計測した数値を使って1ドローンを追尾飛行させる説明図。
上空を飛行する1ドローンを、2テレビカメラを使って撮影した画面を写す3テレビカメラ画面上から画像認識の手法を使って認識した4ドローンの画像の位置に、5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って計測した、1ドローンまでの距離及び方向を継続的に追尾計測した数値を使って1ドローンを無線操縦する説明図。
2テレビカメラを使って撮影した3テレビカメラ画面から画像認識の手法を使って識別した4ドローンの画像の位置に関連付けた、13数値制御のテレビカメラを使って1ドローンを撮影し、1ドローンに取り付けた40測量プリズムが、14数値制御テレビカメラ画面上の41測量プリズムの画像が中央に写る様に13数値制御のテレビカメラを駆動して撮影し、13数値制御のテレビカメラを使って撮影した画面から41測量プリズムの画像を画像認識の手法を使って画像を識別し、計測用のレーザー光を13数値制御のテレビカメラの撮影する画面の中央方向に照射する様に取り付けた、9レーザー距離計測器を使って30レーザー距離追尾計測システムから1ドローンまでの距離及び方向を継続的に追尾計測し、1ドローンを識別して、同様に、11地上の位置を画像を識別して、同様に計測した11地上の位置までの距離及び方向に合わせる様に1ドローンを飛行させて11地上の位置に着陸させる。同様に、42不審ドローンを識別して、同様に42不審ドローンまでの距離及び方向を計測して、計測した42不審ドローンまでの距離及び方向に合わせる様に1ドローンを飛行させて42不審ドローンを排除する説明図。
上空を飛行する1ドローンを、2テレビカメラを使って撮影した画面を写す3テレビカメラ画面から画像認識の手法を使って画像を識別した3テレビカメラ画面の4ドローンの画像の位置に5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って前記駆動機構を駆動して計測した1ドローンまでの距離及び方向を合わせる様に、3テレビカメラ画面の4ドローンの画像の位置に、13数値制御のテレビカメラの駆動機構の関連付けた駆動数値を使って13数値制御のテレビカメラの光学レンズの画角を狭めて撮影する。1ドローンに取り付けた40測量フリズムの画像が14数値制御のテレビカメラ画面の中央に写る様に撮影した画面から画像認識の手法を使って再度画像を識別する。5数値制御のレーザー距離計測機から1ドローンまでの距離及び方向を継続的に追尾計測した数値を使って画像を識別した1ドローンを無線操縦する説明図。
上空を飛行する1ドローンに下向きに取り付けた2テレビカメラを使って、地上の11地上の位置を撮影した3テレビカメラ画面から画像認識の手法を使って継続的に画像を識別した地上の12地上の位置の画像の位置に、5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って前記駆動機構を継続的に駆動して、1ドローンから11地上の位置までの距離及び方向を継続的に追尾計測した数値を使って、1ドローンを継続的に無線操縦する説明図。
上空を飛行する1ドローンに下向きに取り付けた13数値制御のテレビカメラのズーム機能を使って画角を広角にして地上の54走行する車両を撮影した、32数値制御のテレビカメラ画面A から画像認識の手法を使って画像を識別した地上の54走行する車両の画像の位置が、33数値制御のテレビカメラ画面B の45走行する車両の画像が中央に写る様に、13数値制御のテレビカメラの撮影方向を変えて54走行する車両を追尾撮影する。更に、13数値制御のテレビカメラのズーム機能を使って画角を挟角にして、54走行する車両を拡大して34数値制御のテレビカメラ画面C に写る45走行する車両の画像が中央に写る様に撮影する。13数値制御のテレビカメラの駆動機構に取り付けた9レーザー距離計測器を使って上空の1ドローンから54走行する車両までの距離及び方向を継続的に追尾計測した数値を使って、1ドローンを54走行する車両に追尾飛行させる無線操縦の説明図。
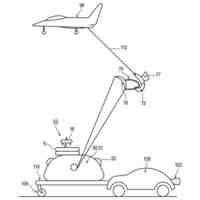
30レーザー距離追尾計測システムの計測する位置から2テレビカメラを使って撮影した3テレビカメラ画面上に写る飛行する1ドローンに取り付けた41測量プリズムの画像の位置に、5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して計測した飛行する1ドローンに取り付けた40測量プリズムとの距離及び方向を使って飛行する1ドローンの飛行を操作する。飛行を操作する1ドローンに取り付けた31追尾計測システムの2テレビカメラを使って11地上の位置に取り付けた40測量プリズムを撮影する。31追尾計測システムの2テレビカメラが撮影した、3テレビカメラ画面上に写る11地上の位置に取付けた41測量プリズムの画像の位置に、5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して11地上の位置に取り付けた40測量プリズムとの距離及び方向を計測する。飛行する1ドローンを計測した距離及び方向を使って操作し、飛行する1ドローンに取り付けた31追尾計測システムから11地上の位置に取付けた40測量プリズムとの距離及び方向を計測し、地上の30レーザー距離追尾計測システムのから飛行する1ドローンに取り付けた40測量プリズムとの距離及び方向を計測し、飛行する1ドローンを介して地上の30レーザー距離追尾計測システムのから、11地上の位置に取付けた40測量プリズムとの距離及び方向を計測する説明図。
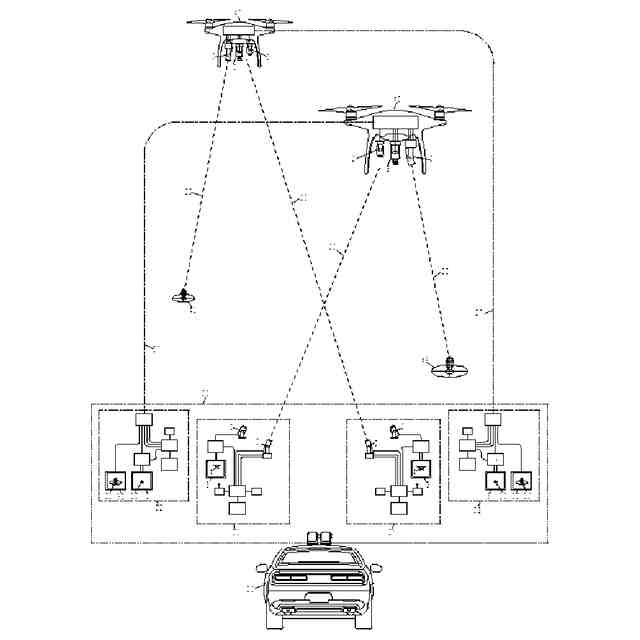
走行する56走行する車両に取り付けた50、51追尾計測システムA、Bの2テレビカメラを使って撮影した、3テレビカメラ画面上に写る飛行する1ドローンの画像の位置に、56走行する車両に取り付けた50、51追尾計測システムA、Bの5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して56走行する車両から上空を飛行する46、47ドローンA、Bとの距離及び方向を計測する。前記計測した距離及び方向を合わせる様に46、47ドローンA、B を56走行する車両に追尾飛行させて46、47ドローンA、B に取り付けた2テレビカメラを使って撮影した、3テレビカメラ画面上に写る地上の35、36地上の位置の画像A、Bの位置に、46、47ドローンA、B に取り付けた、5数値制御のレーザー距離計測機の駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して上空を飛行する46、47ドローンA、Bから地上の48、49地上の位置A、Bとの距離及び方向を計測する。56走行する車両、又は、飛行する46、47ドローンA、BのGPS測位値から地上の48、49地上の位置A、B との距離及び方向を計測する説明図。及び、56走行する車両、又は、飛行する46、47ドローンA、BのGPS測位値から地上の48、49地上の位置A、B を13数値制御テレヒカメラを使って撮影する説明図。
上空を飛行する1ドローンに取り付けた、2テレビカメラを使って54走行する車両を撮影した、3テレビカメラ画面上に写る58走行する車両の画像の位置に、1ドローンに取り付けた13数値制御テレビカメラの駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して32数値制御テレビカメラ画面上に写る57走行する車両の画像の位置が33数値制御テレビカメラ画面上の中央に写る様に58走行する車両を撮影する。前記駆動機構に取り付けた9レーザー距離計測器が計測した、1ドローンから54走行する車両との距離及び方向を使って、1ドローンを54走行する車両に追尾飛行する説明図。
上空を飛行する1ドローンに取り付けた、2テレビカメラを使って飛行する42不審ドローンを撮影した、3テレビカメラ画面上に写る43不審ドローンの画像の位置に、1ドローンに取り付けた13数値制御テレビカメラの駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して32テレビカメラ画面A上に写る43不審ドローンの画像の位置が33テレビカメラ画面B上の中央に写る様に42不審ドローンを撮影する画面から、画像認識の方法を使って42不審ドローンを識別する。前記駆動機構に取り付けた9レーザー距離計測器が計測した距離及び方向を使って、1ドローンを前記識別した42不審ドローンに追尾飛行する説明図。
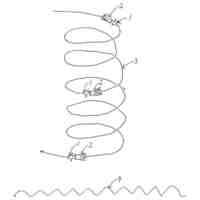
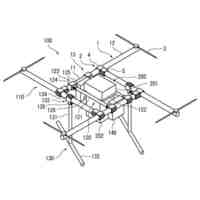
遠く離れて飛行する1ドローンを2テレビカメラを使って撮影した3テレビカメラ画面上に写る遠く離れて飛行するドローンの画像の位置に、60ミラー駆動レーザー距離計測機の駆動機構の関連付けた駆動数値を使って、前記駆動機構を駆動して、遠く離れて飛行するドローンの65スキャーン範囲を、レーザー光の光軸を広げで60ミラー駆動レーザー距離計測機のミラーをスキャーン駆動してレーザー光を照射して、1ドローンにスキャーン照射したレーザー光の反射を61受光器を使って計測して距離及び方向を計測する説明図。
【 実施例】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
人工台風
1か月前
個人
ドローン
5か月前
個人
着火ドローン
3か月前
個人
救難消防飛行艇
3か月前
個人
ドローンシステム
7か月前
東レ株式会社
中空回転翼
2か月前
個人
導風板付き垂直離着陸機
29日前
株式会社三圓
浮上装置
11か月前
個人
陸海空用の乗り物
4か月前
個人
連続回転可能な飛行機翼
3か月前
東レ株式会社
プロペラブレード
2か月前
個人
ドローンの計測操作方法2
11か月前
個人
空飛ぶクルマ
2か月前
個人
垂直離着陸機用エンジン改
7か月前
東レ株式会社
プロペラブレード
2か月前
東レ株式会社
プロペラブレード
2か月前
個人
ドローンの計測操作方法3
11か月前
個人
空中移動システム
8か月前
個人
ドローンを自動離着陸する方法
7か月前
個人
ドローン消音装置
10か月前
個人
エアライナー全自動パラシュート
5か月前
トヨタ自動車株式会社
ドローン
5か月前
株式会社ACSL
システム
6か月前
株式会社ACSL
システム
6か月前
個人
搬送方法および搬送システム
2か月前
個人
ヘリコプター駆動装置
2か月前
合同会社アドエア
飛行体の落下補助装置
8か月前
合同会社アドエア
パラシュート射出装置
5か月前
株式会社小糸製作所
飛行体ポート
3か月前
個人
飛行体
2か月前
全日本空輸株式会社
ドーリシステム
10か月前
個人
パラボラ型スペースデブリカタパルト
2か月前
株式会社SUBARU
移動体
8か月前
個人
飛行体
2か月前
個人
垂直離着陸機用ガスタービンエンジン
7か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ