TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025095037
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023210802
出願日
2023-12-14
発明の名称
飛行体
出願人
個人
代理人
弁理士法人みなみ特許事務所
主分類
B64D
1/22 20060101AFI20250619BHJP(航空機;飛行;宇宙工学)
要約
【課題】被搬送物を吊り下げ可能な機構を備えるものであって、当該機構が簡易な構成であって風の影響を受けにくいものである飛行体を提供する。
【解決手段】胴体と、胴体に設けられた脚部および吊下部を備える飛行体であって、脚部は、着陸時に胴体を支持するものであり、吊下部は、被搬送物を吊り下げるものであって、腕部と、腕部の先端に設けられた係合部と、腕部の基端に設けられた支持部を有しており、係合部は、被搬送物と係合するものであり、支持部は、腕部を水平軸周りに回動可能に支持するものであって、脚部の下端より上側に位置しており、腕部は、少なくとも、腕部が支持部から下向きに延び係合部が脚部の下端より下側に位置する吊下状態と、腕部が支持部から横向きに延び係合部が脚部の下端より上側に位置する格納状態との間で回動可能であり、支持部が付勢部材を有しており、付勢部材は、腕部が吊下状態となるように付勢するものである。
【選択図】図1
特許請求の範囲
【請求項1】
胴体と、前記胴体に設けられた脚部および吊下部を備える飛行体であって、
前記脚部は、着陸時に前記胴体を支持するものであり、
前記吊下部は、被搬送物を吊り下げるものであって、腕部と、前記腕部の先端に設けられた係合部と、前記腕部の基端に設けられた支持部を有しており、
前記係合部は、前記被搬送物と係合するものであり、
前記支持部は、前記腕部を水平軸周りに回動可能に支持するものであって、前記脚部の下端より上側に位置しており、
前記腕部は、少なくとも、前記腕部が前記支持部から下向きに延び前記係合部が前記脚部の下端より下側に位置する吊下状態と、前記腕部が前記支持部から横向きに延び前記係合部が前記脚部の下端より上側に位置する格納状態との間で回動可能であり、
前記支持部が付勢部材を有しており、前記付勢部材は、前記腕部が吊下状態となるように付勢するものであることを特徴とする飛行体。
発明の詳細な説明
【技術分野】
【0001】
本発明は、被搬送物を吊り下げて搬送する飛行体に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
近年普及している無人飛行体(UAV、ドローンなどともいう)において、種々の荷物(被搬送物)を搬送する場合がある。飛行体が被搬送物を保持するための構造には種々のものがあるが、たとえば、飛行体の胴体に設けられた昇降自在なワイヤと、ワイヤの先端に設けられたフックを有し、フックに被搬送物を引っ掛けて吊り下げるものがある。このような構造の場合、ワイヤに吊り下げられたフックが風(自然の風や飛行体のロータによる風)の影響で揺れ動くことが問題になる。特に、遠隔操作や自動制御により被搬送物を搬送する場合、すなわち、被搬送物にフックを引っ掛ける動作に人が直接介在しない場合に、大きな問題となる。
【0003】
そこで、特許文献1に示すように、フックを吊り下げるワイヤを伸縮自在なガイド部材で覆うことで、風の影響を受けないようにするものが提案されている(特許文献1の図7~9)。
【先行技術文献】
【特許文献】
【0004】
特許第6726803号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1の飛行体では、ワイヤを昇降させる機構や伸縮するガイド部材の構造が複雑であり、機体の重量が重くなることや製造費用が高くなることが問題であった。
【0006】
本発明は、このような事情を鑑みたものであり、被搬送物を吊り下げ可能な機構を備えるものであって、当該機構が簡易な構成であって風の影響を受けにくいものである飛行体を提供することを目的とする。
【課題を解決するための手段】
【0007】
本発明の飛行体は、胴体と、前記胴体に設けられた脚部および吊下部を備える飛行体であって、前記脚部は、着陸時に前記胴体を支持するものであり、前記吊下部は、被搬送物を吊り下げるものであって、腕部と、前記腕部の先端に設けられた係合部と、前記腕部の基端に設けられた支持部を有しており、前記係合部は、前記被搬送物と係合するものであり、前記支持部は、前記腕部を水平軸周りに回動可能に支持するものであって、前記脚部の下端より上側に位置しており、前記腕部は、少なくとも、前記腕部が前記支持部から下向きに延び前記係合部が前記脚部の下端より下側に位置する吊下状態と、前記腕部が前記支持部から横向きに延び前記係合部が前記脚部の下端より上側に位置する格納状態との間で回動可能であり、前記支持部が付勢部材を有しており、前記付勢部材は、前記腕部が吊下状態となるように付勢するものであることを特徴とする。支持部は、胴体に直接取り付けられていてもよいし、胴体に別部材を介して取り付けられていてもよい。たとえば、この別部材が脚部であってもよく、その場合、支持部が脚部に取り付けられる。吊下状態は、腕部が垂直向きの場合に限定されない。格納状態は、腕部が水平向きの場合に限定されない。吊下状態と格納状態とで、相対的に、吊下状態の方が、腕部が垂直向きに近く、格納状態の方が、腕部が水平向きに近い。
【発明の効果】
【0008】
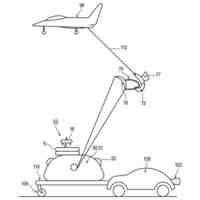
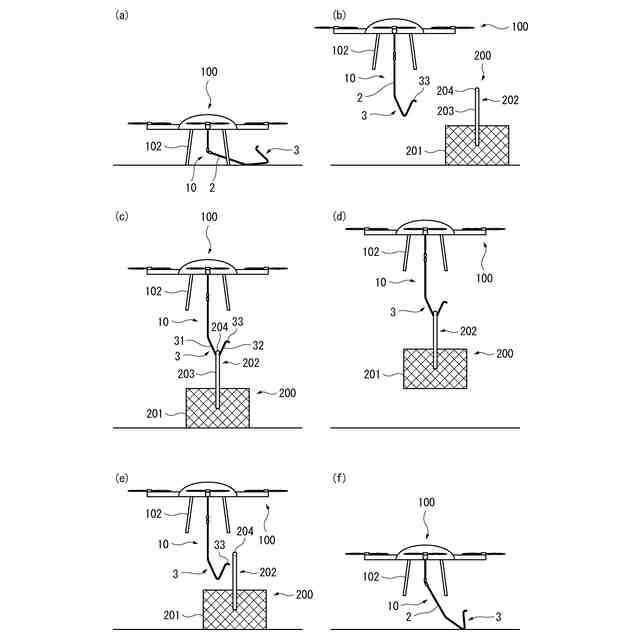
本発明の飛行体によれば、吊下部は、腕部と、腕部の先端の係合部および基端の支持部を有する簡易な構成であるから、重量を軽くすることができ、製造費用を抑えられる。飛行時においては、腕部が吊下状態となり、係合部が下端に位置するので、係合部を被搬送物に係合させて、被搬送物を吊り下げられる。腕部には付勢部材の付勢力が作用しており、風による外力の影響を受けにくい。着陸時においては、腕部の下端(係合部)が地面に接地した後、飛行体の下降に伴い、付勢部材の付勢力に抗して腕部が回動し、吊下状態から格納状態へと移行する。脚部が地面に接地した状態で、支持部は地面より上側に位置するので、吊下部が着陸の妨げにならない。
【図面の簡単な説明】
【0009】
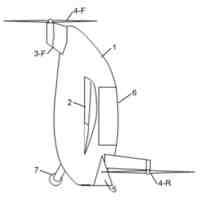
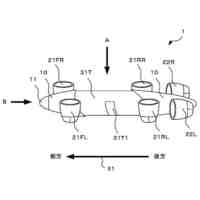
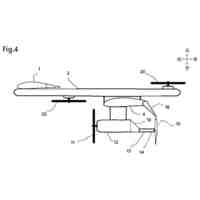
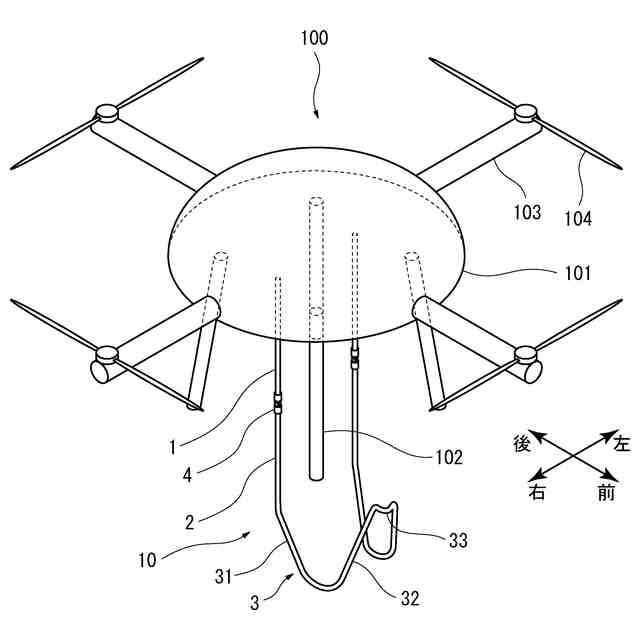
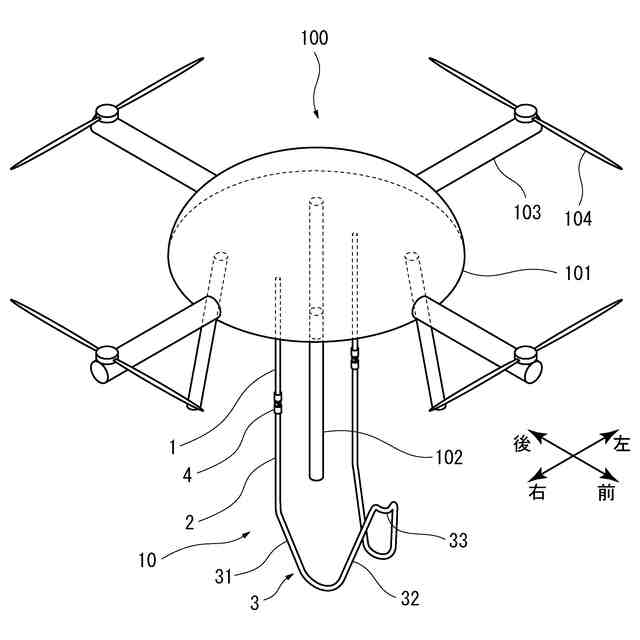
第1実施形態の飛行体の斜視図である。
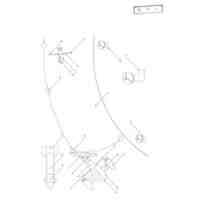
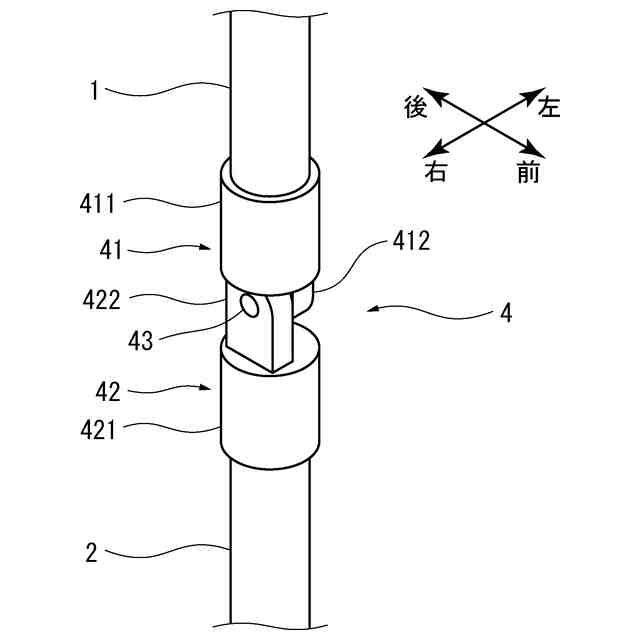
支持部の斜視図(吊下状態)である。
(a)は支持部の側面図(吊下状態)、(b)は支持部の側面図(格納状態)である。
(a)~(f)は飛行体による被搬送物の搬送の説明図である。
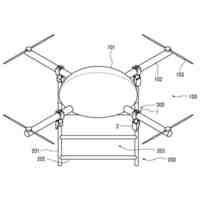
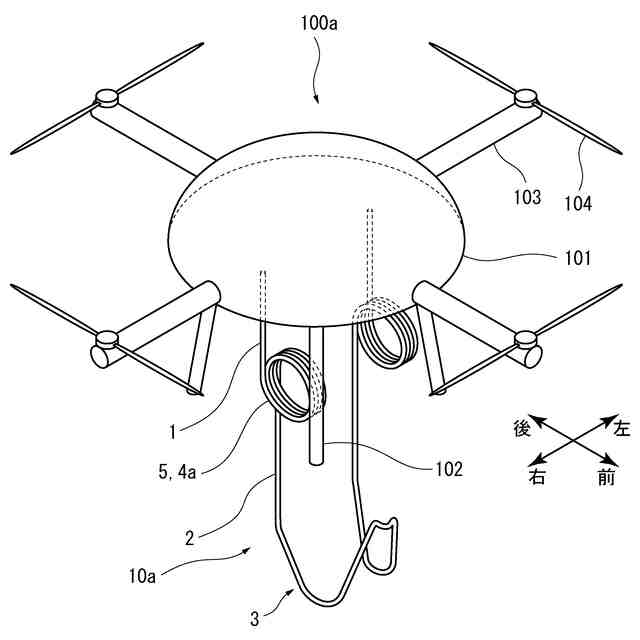
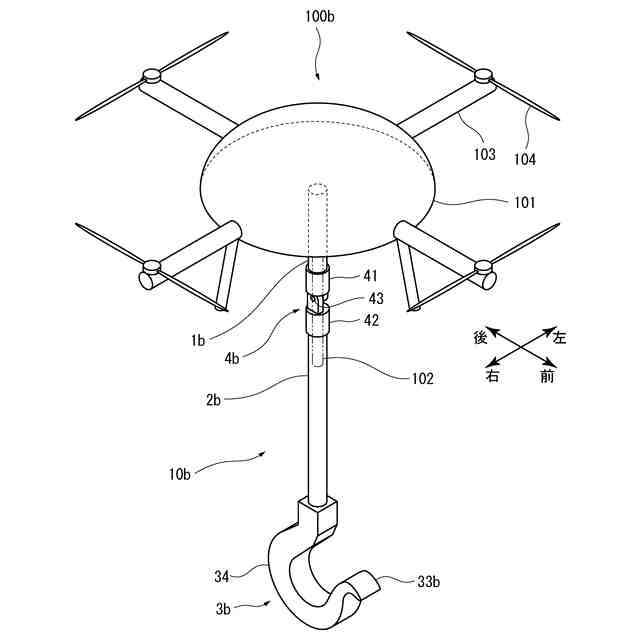
第2実施形態の飛行体の斜視図である。
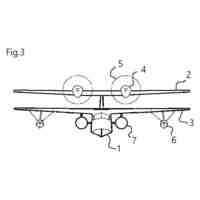
第3実施形態の飛行体の斜視図である。
【発明を実施するための形態】
【0010】
以下、本発明の飛行体の具体的な内容について説明する。なお、飛行体100に対して、図1に示すように、前後左右方向を定める。この第1実施形態の飛行体は、遠隔操作または自動制御により飛行するドローンである。図1に示すように、飛行体100は、胴体101と、脚部102と、桁材103と、ロータ104と、吊下部10を備える。胴体101は、上面視して円形で上側に膨らむドーム状であり、内部には、制御装置、通信装置やバッテリ(いずれも図示省略)が設けられている。脚部102は、胴体101の下面に4本設けられており、棒状である。4本の脚部102は、胴体101の円周方向に等間隔で並んで配置されており、胴体101の中心に対して、左前、右前、左後、右後に位置している。脚部102は、胴体101の下面から、鉛直方向よりやや半径方向外側に傾斜して延びている。飛行体100の着陸時には、脚部102の下端が地面に接地し、胴体101を支持する。桁材103は、胴体101の周縁部に4本設けられており、円筒状である。4本の桁材103は、胴体101の円周方向に等間隔で並んで配置されており、胴体101の周縁部から、半径方向外側の前後左右に向けて延びている。ロータ104は、4本の各桁材103の先端に設けられている。各ロータ104は、胴体101内の制御装置やバッテリと接続されている。ロータ104の回転により揚力が得られ、飛行体100が飛行する。飛行体100は、前後左右上下方向の移動や、旋回、空中静止などが可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
飛行体
19日前
個人
人工台風
4か月前
個人
ドローン
8か月前
個人
着火ドローン
6か月前
個人
救難消防飛行艇
6か月前
個人
ドローンシステム
10か月前
個人
AERO JET
1か月前
東レ株式会社
中空回転翼
5か月前
個人
動力原付きグライダー
2か月前
個人
飛行自動車vol.2
26日前
個人
無人空中移動体
1か月前
個人
連続回転可能な飛行機翼
6か月前
個人
陸海空用の乗り物
7か月前
個人
導風板付き垂直離着陸機
4か月前
東レ株式会社
飛翔体用ブレード
1か月前
東レ株式会社
プロペラブレード
5か月前
東レ株式会社
プロペラブレード
5か月前
個人
空飛ぶクルマ
5か月前
個人
垂直離着陸機用エンジン改
10か月前
東レ株式会社
プロペラブレード
5か月前
個人
空中移動システム
11か月前
個人
ドローンを自動離着陸する方法
10か月前
個人
エアライナー全自動パラシュート
8か月前
トヨタ自動車株式会社
ドローン
8か月前
株式会社小糸製作所
飛行体ポート
6か月前
合同会社アドエア
パラシュート射出装置
8か月前
株式会社ACSL
システム
9か月前
個人
ヘリコプター駆動装置
6か月前
合同会社アドエア
飛行体の落下補助装置
11か月前
株式会社ACSL
システム
9か月前
個人
搬送方法および搬送システム
6か月前
個人
飛行体
2か月前
個人
垂直離着陸機用ガスタービンエンジン
10か月前
株式会社SUBARU
移動体
11か月前
個人
パラボラ型スペースデブリカタパルト
5か月前
個人
飛行体
5か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ