TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025095692
公報種別
公開特許公報(A)
公開日
2025-06-26
出願番号
2023211876
出願日
2023-12-15
発明の名称
ショベル
出願人
住友建機株式会社
代理人
個人
,
個人
主分類
E02F
9/22 20060101AFI20250619BHJP(水工;基礎;土砂の移送)
要約
【課題】上部旋回体を目標施工面に正対させる正対制御の精度を向上させる。
【解決手段】下部走行体と、前記下部走行体に旋回可能に搭載される上部旋回体と、前記下部走行体または前記上部旋回体に旋回力を加えて旋回させることで、前記上部旋回体を目標施工面に正対させる正対制御を行う制御装置とを備え、前記制御装置は、前記上部旋回体が前記目標施工面に正対するまでに必要となる旋回角度に基づいて、前記下部走行体または前記上部旋回体の旋回速度を制御する。
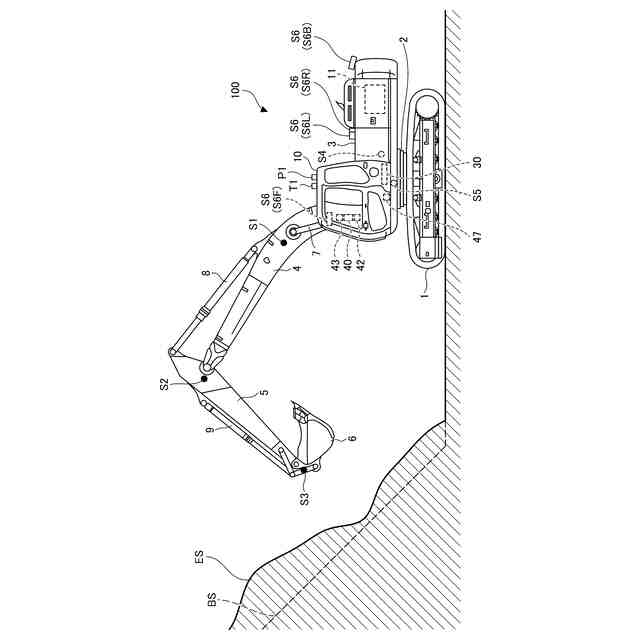
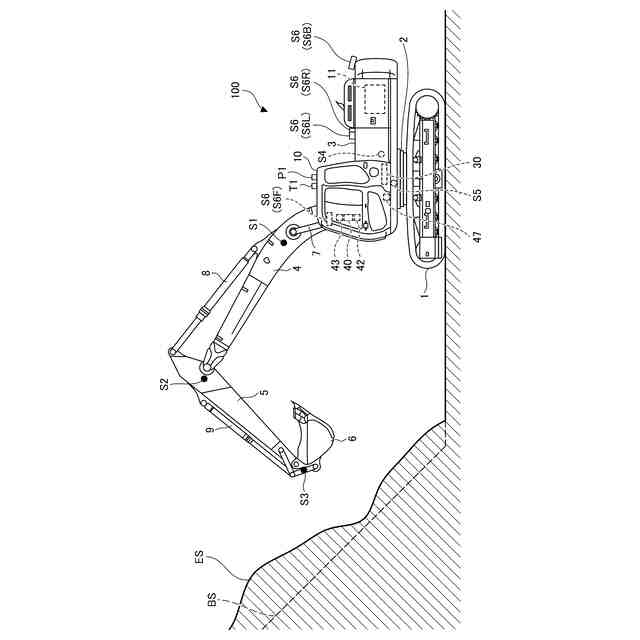
【選択図】図1
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回可能に搭載される上部旋回体と、
前記下部走行体または前記上部旋回体に旋回力を加えて旋回させることで、前記上部旋回体を目標施工面に正対させる正対制御を行う制御装置と、を備え、
前記制御装置は、前記上部旋回体が前記目標施工面に正対するまでに必要となる旋回角度に基づいて、前記下部走行体または前記上部旋回体の旋回速度を制御する、ショベル。
続きを表示(約 1,200 文字)
【請求項2】
前記制御装置は、前記下部走行体または前記上部旋回体の旋回速度が所定の速度を超えている場合に、前記旋回速度を制限する、請求項1に記載のショベル。
【請求項3】
前記所定の速度は、前記上部旋回体が前記目標施工面に正対するまでに必要となる旋回角度に基づいて求められる、請求項2に記載のショベル。
【請求項4】
前記制御装置は、前記正対制御を開始する際の前記下部走行体または前記上部旋回体の旋回速度と前記所定の速度との差が所定の値よりも大きな場合に、旋回力を加えている前記下部走行体または前記上部旋回体に対して、前記下部走行体または前記上部旋回体に現在加えている旋回力とは逆向きの旋回力を加える、請求項2に記載のショベル。
【請求項5】
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えそうな場合に、前記ショベルの操作者に報知を行う、請求項1に記載のショベル。
【請求項6】
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えた場合に、前記ショベルの操作者に報知を行う、請求項1に記載のショベル。
【請求項7】
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えそうな場合に、前記ショベルの操作者に第1の報知を行い、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えた場合に、前記ショベルの操作者に前記第1の報知とは異なる態様の第2の報知を行う、請求項1に記載のショベル。
【請求項8】
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えた場合に、前記上部旋回体が前記目標施工面に正対するまで前記下部走行体または前記上部旋回体を逆方向に旋回させる、請求項1に記載のショベル。
【請求項9】
前記制御装置は、所定のスイッチが操作されながら、前記下部走行体または前記上部旋回体を旋回させるための操作が行われ、かつ、前記目標施工面を施工するショベルの動作要素の下方に前記目標施工面がある場合に前記正対制御を行う、請求項1に記載のショベル。
【請求項10】
下部走行体と、
前記下部走行体に旋回可能に搭載される上部旋回体と、
前記下部走行体または前記上部旋回体に旋回力を加えて旋回させることで、前記上部旋回体を目標施工面に正対させる正対制御を行う制御装置と、を備え、
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えそうな場合に報知を行う、ショベル。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ショベルに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来から、ショベルにおいては、上部旋回体を目標施工面に正対させる、いわゆる正対制御が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/112059号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ショベルを用いた作業においては、正対の精度を向上させることで、作業を正確に行うことができるとともに、作業の効率化を図ることができる。
【0005】
そこで、上部旋回体を目標施工面に正対させる正対制御の精度を向上させることができるショベルを提供することが好ましい。
【課題を解決するための手段】
【0006】
上記目的を達成するために本開示は、
下部走行体と、
前記下部走行体に旋回可能に搭載される上部旋回体と、
前記下部走行体または前記上部旋回体に旋回力を加えて旋回させることで、前記上部旋回体を目標施工面に正対させる正対制御を行う制御装置と、を備え、
前記制御装置は、前記上部旋回体が前記目標施工面に正対するまでに必要となる旋回角度に基づいて、前記下部走行体または前記上部旋回体の旋回速度を制御する、ショベルである。
【0007】
また、下部走行体と、
前記下部走行体に旋回可能に搭載される上部旋回体と、
前記下部走行体または前記上部旋回体に旋回力を加えて旋回させることで、前記上部旋回体を目標施工面に正対させる正対制御を行う制御装置と、を備え、
前記制御装置は、前記下部走行体または前記上部旋回体が旋回することで前記上部旋回体が前記目標施工面との正対位置を超えそうな場合に報知を行う、ショベルである。
【発明の効果】
【0008】
本開示によれば、上部旋回体を目標施工面に正対させる正対制御の精度を向上させることができる。
【図面の簡単な説明】
【0009】
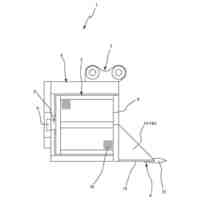
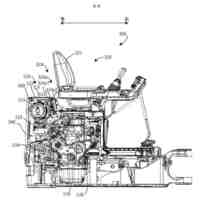
本発明の実施形態に係る掘削機としてのショベルの側面図である。
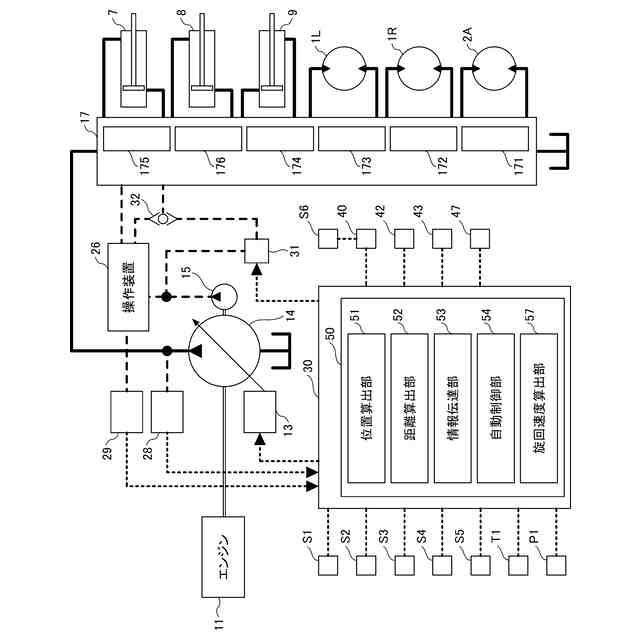
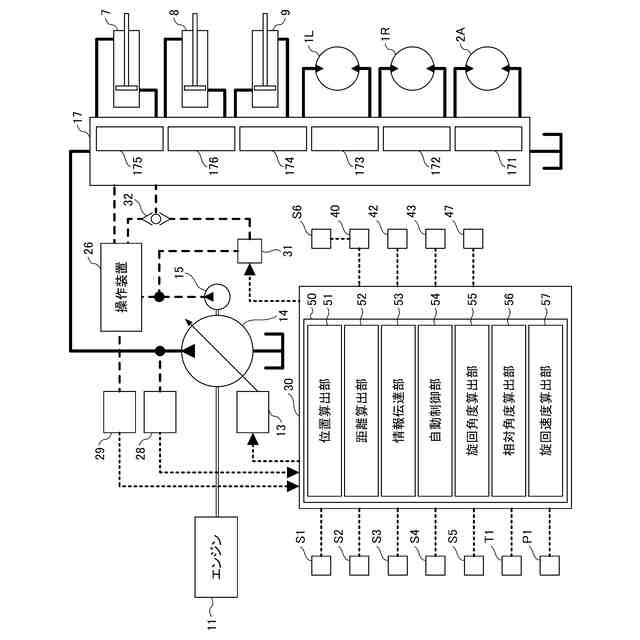
ショベルの駆動系の構成例を示すブロック図である。
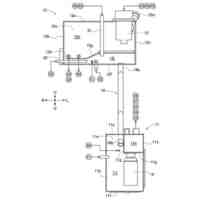
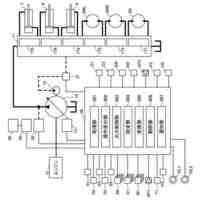
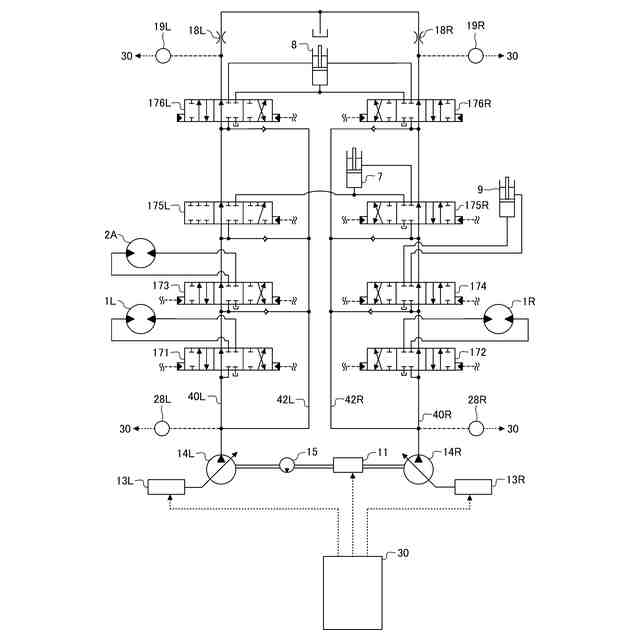
図1のショベルに搭載される油圧システムの構成例を示す概略図である。
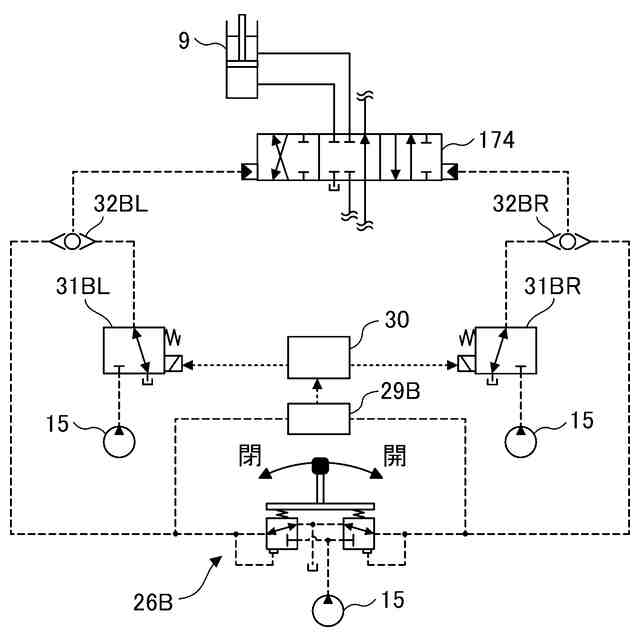
油圧システムの一部を抜き出した図である。
油圧システムの一部を抜き出した図である。
油圧システムの一部を抜き出した図である。
ショベルの駆動系の別の構成例を示すブロック図である。
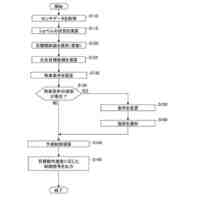
正対制御の処理を示すフローチャートである。
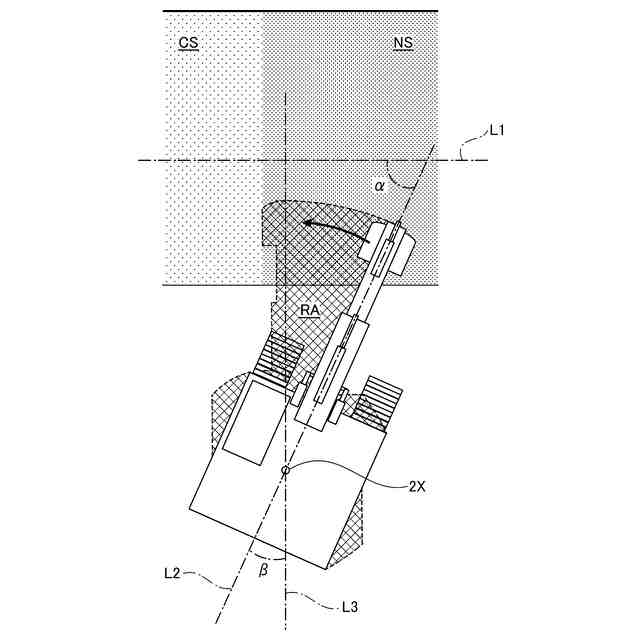
正対制御が実行される際のショベルの上面図である。
正対制御が実行される際のショベルの上面図である。
正対制御が実行される際のショベルを左後方から見たときのショベルの斜視図である。
正対制御が実行される際のショベルを左後方から見たときのショベルの斜視図である。
正対制御に付加される処理の一例を説明するためのフローチャートである。
上部旋回体の旋回速度の制限方法の一例を説明するためのフローチャートである。
正対制御に付加される処理の他の例を説明するためのフローチャートである。
正対処理が実行される際のショベルの上面図である。
正対処理が実行される際のショベルの上面図である。
電気式操作装置を含む操作システムの構成例を示す。
【発明を実施するための形態】
【0010】
以下に、本発明の実施形態について図面を参照して説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友建機株式会社
作業機械、作業機械の制御システム、及び、作業機械の管理システム
2か月前
個人
バケット
1か月前
個人
建物の不同沈下の修正方法
1か月前
鹿島建設株式会社
接続方法
21日前
日本車輌製造株式会社
杭打機
1日前
株式会社富田製作所
継手部構造
1か月前
株式会社大林組
操縦装置
1か月前
株式会社クボタ
作業車
今日
ウエダ産業株式会社
アタッチメント
12日前
株式会社郷土開発
傾斜地の切土工法
20日前
日立建機株式会社
建設機械
7日前
エポコラム機工株式会社
地盤改良装置
5日前
株式会社クボタ
作業機
20日前
日本車輌製造株式会社
建設機械
5日前
ヤンマーホールディングス株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
ヤンマーホールディングス株式会社
作業機械
1か月前
FKS株式会社
擁壁及び擁壁の築造方法
1か月前
株式会社次世代一次産業実践所
登山道の施工装置
1か月前
株式会社三誠
建物の免震構造
1か月前
個人
アンカーボルト支持装置
1か月前
日本車輌製造株式会社
杭打機の表示システム
1か月前
日本車輌製造株式会社
杭打機の制御システム
1か月前
ナブテスコ株式会社
ドーザブレード駆動機構
1か月前
株式会社竹中工務店
構真柱
今日
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
株式会社大林組
施工支援装置及び施工支援方法
1か月前
セイコー機器株式会社
親綱支柱
1日前
株式会社大林組
掘削支援装置及び掘削支援方法
14日前
日本車輌製造株式会社
建設機械の電源システム
1か月前
日立建機株式会社
作業機械
今日
株式会社大林組
評価支援装置及び評価支援方法
1か月前
個人
保護カバー及び保護カバーの取付方法
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ