TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059145
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023168962
出願日
2023-09-29
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
9/20 20060101AFI20250403BHJP(水工;基礎;土砂の移送)
要約
【課題】搭載した周辺認識センサの視界を有効に用い、効率的な自動走行を行う作業機械を提供する。
【解決手段】本発明に係る作業機械は、下部走行体と、下部走行体の上部に旋回可能に支持された上部旋回体と、上部旋回体に設置された周辺認識装置と、周辺認識装置により取得した周辺認識情報に基づいて下部走行体及び上部旋回体を制御する制御装置と、を有する作業機械であって、制御装置は、下部走行体に対する上部旋回体の旋回角度に応じた走行方向に対する車幅と、周辺認識装置による周辺認識情報の取得範囲とに基づいて、記作業機械が走行するときに通過する予定の領域である走行予定領域の周辺認識情報を、作業機械が該走行予定領域を通過するまでに少なくとも第一閾値時間以上取得できる旋回角度を走行時における旋回角度として決定する。
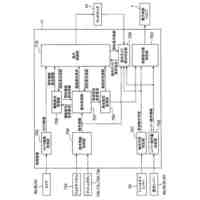
【選択図】図4
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体の上部に旋回可能に支持された上部旋回体と、
前記上部旋回体に設置された周辺認識装置と、
前記周辺認識装置により取得した周辺認識情報に基づいて前記下部走行体及び前記上部旋回体を制御する制御装置と、を有する作業機械であって、
前記制御装置は、
前記下部走行体に対する前記上部旋回体の旋回角度に応じた走行方向に対する車幅と、前記周辺認識装置による周辺認識情報の取得範囲とに基づいて、
前記作業機械が走行するときに通過する予定の領域である走行予定領域の周辺認識情報を、前記作業機械が該走行予定領域を通過するまでに少なくとも第一閾値時間以上取得できる前記旋回角度を走行時における旋回角度として決定する、
ことを特徴とする、作業機械。
続きを表示(約 990 文字)
【請求項2】
請求項1の作業機械であって、
さらに前記上部旋回体に対して回動可能に支持された作業機を有し、
前記制御装置は、前記作業機の姿勢に基づいた前記周辺認識装置の死角を前記周辺認識情報の取得範囲から除外する
ことを特徴とする、作業機械。
【請求項3】
請求項2に記載の作業機械であって、
前記制御装置は、前記走行予定領域において前記周辺認識装置の死角が最小となる旋回角度を前記走行時における旋回角度として決定する、
ことを特徴とする、作業機械。
【請求項4】
請求項1に記載の作業機械であって、
前記制御装置は、前記周辺認識装置により取得した周辺認識情報と、前記車幅と、前記下部走行体の目標走行速度とに基づいて、前記周辺認識装置の認識範囲において前記車幅を一辺として得られる矩形の他の一辺の長さを算出し、該他の一辺の長さが最大となる旋回角度を前記走行時における旋回角度として決定する、
ことを特徴とする、作業機械。
【請求項5】
請求項1に記載の作業機械であって、
前記制御装置は、施工管理システムから走行中の旋回角度指令および前記周辺認識装置が認識不可能な範囲を補助する周辺補助情報を取得し、前記周辺認識装置により取得した周辺認識情報および前記周辺補助情報から前記旋回角度指令の旋回角で走行が可能であると判断できる場合には、前記旋回角度指令の旋回角度を前記走行時における旋回角として決定する、
ことを特徴とする、作業機械。
【請求項6】
請求項1に記載の作業機械であって、
前記制御装置は、施工管理システムから取得した走行指令中に走行時における前記上部旋回体の旋回角度が含まれていた場合には、前記周辺認識装置により取得した周辺認識情報と、前記上部旋回体の旋回角度に応じた走行方向に対する車幅と、に基づいて、走行可能であるか否か判断する、
ことを特徴とする、作業機械。
【請求項7】
請求項1に記載の作業機械であって、
前記制御装置は、前記作業機械が前記走行予定領域を通過するまでの時間が第二閾値時間を超える場合には該作業機械の走行を中止させる、
ことを特徴とする、作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は作業機械に関し、特に自動で走行可能な作業機械に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
ショベルの駐車位置までの移動の支援を目的として、ショベルを自動走行させる技術が知られている(例えば特許文献1)。この文献では、上部旋回体上に空間認識装置と、上部旋回体の向きと下部走行体の向きとの相対的な関係を検出する向き検出装置とを設け、空間認識装置と向き検出装置の出力に基づいて走行アクチュエータの動作を制御するショベルが公開されている。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/182066号
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動走行を行うショベルのような作業機械に周辺の障害物や地形に関する情報を認識するための周辺認識装置を搭載する場合、認識範囲の確保のため周辺認識装置を複数搭載することが行われる。これらの周辺認識装置の認識範囲は、周辺認識装置の上部旋回体上での搭載位置や作業腕であるフロント作業機の姿勢の影響を受ける。特にフロント作業機は上部旋回体前方側に張り出して存在しており、周辺認識装置の認識範囲に干渉することで死角を作る。ショベルが自動走行する際は周辺認識装置の認識範囲に干渉しないようにフロント作業機を持ち上げた姿勢をとることも考えられるが、上方の架線などの障害物に接触する可能性がある場合や、重心位置が上昇することによって車体の挙動が不安定となる可能性がある場合、フロント作業機が衛星からの電波を遮蔽することにより、自機の位置を推定するためのGNSS(Global Navigation Satellite System)の受信状況が悪化してしまう場合など、このような姿勢が適さない場合も存在する。
【0005】
ショベルは走行機構を含む下部走行体上に上部旋回体が旋回可能に取り付けられているため、走行時の進行方向は上部旋回体の方向にかかわらず下部走行体の前方側または後方側となる。先述のような理由でフロント作業機を下げた姿勢のまま走行する場合、上部旋回体前側を進行方向の前方側に向けていると、進行方向に周辺認識装置の死角ができることとなる。このように走行する予定の範囲の障害物や地形に関する情報が十分に取得できない場合には、走行速度の低減や人による監視が必要となるなどの制約が生じ、自動走行の導入による省人化効果が十分に得られないことが考えられる。自動走行を行うショベルでは、進行方向の障害物や地形に関する情報を死角無く取得できることが望ましい。
【0006】
本発明は、上記課題を鑑みてなされたものであり、その目的は、進行方向の障害物や地形に関する情報を死角無く取得して、制約が生じることのない自動走行を行う作業機械を提供することである。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明に係る作業機械は、下部走行体と、下部走行体の上部に旋回可能に支持された上部旋回体と、上部旋回体に設置された周辺認識装置と、周辺認識装置により取得した周辺認識情報に基づいて下部走行体及び上部旋回体を制御する制御装置と、を有する作業機械であって、制御装置は、下部走行体に対する上部旋回体の旋回角度に応じた走行方向に対する車幅と、周辺認識装置による周辺認識情報の取得範囲とに基づいて、作業機械が走行するときに通過する予定の領域である走行予定領域の周辺認識情報を、作業機械が該走行予定領域を通過するまでに少なくとも第一閾値時間以上取得できる旋回角度を走行時における旋回角度として決定する。
【発明の効果】
【0008】
本発明によれば、進行方向の障害物や地形に関する情報を死角無く取得して制約が生じることなく自動走行を行う作業機械を提供することができる。
本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の課題、構成及び効果は、以下の実施例の説明により明らかにされる。
【図面の簡単な説明】
【0009】
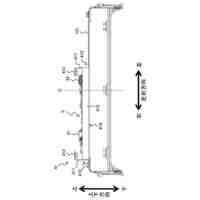
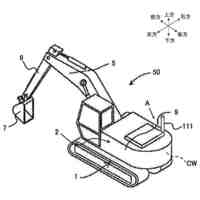
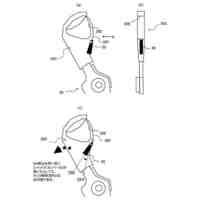
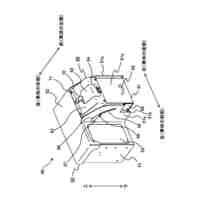
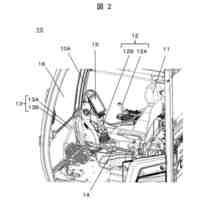
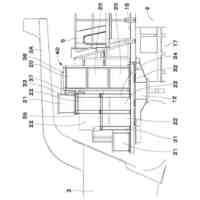
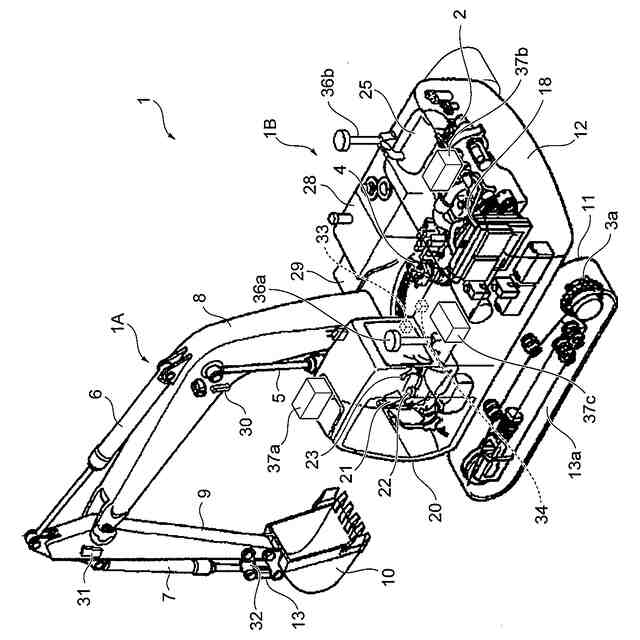
本発明が適用される作業機械の一例である油圧ショベルの構成図。
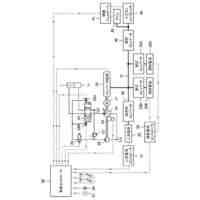
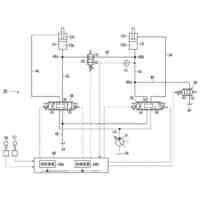
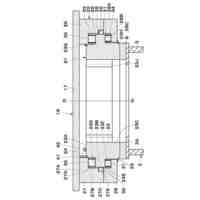
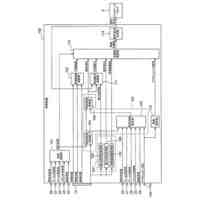
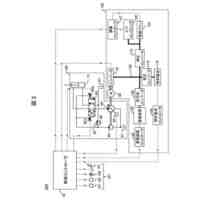
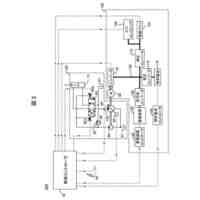
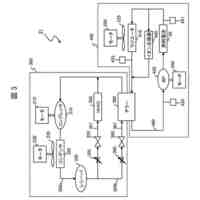
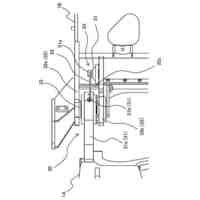
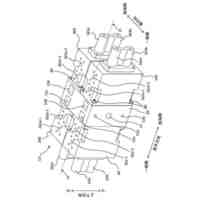
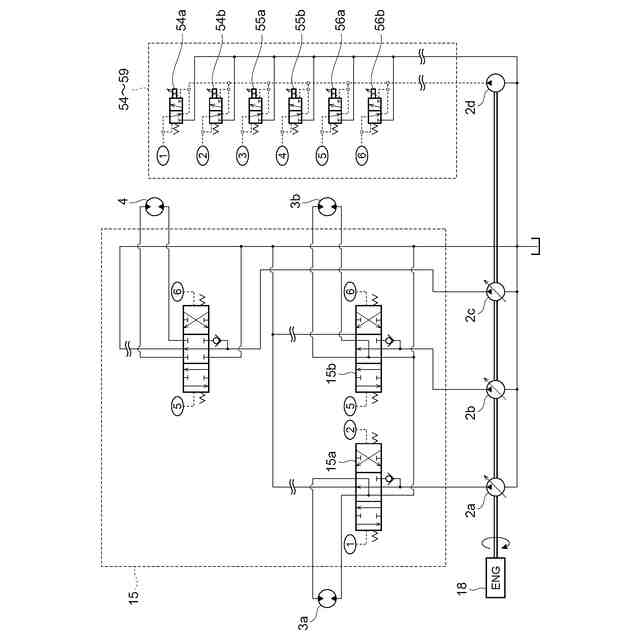
本発明の一実施例における油圧回路の一例を示す構成図。
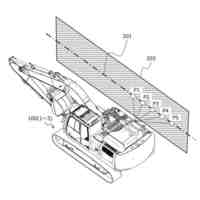
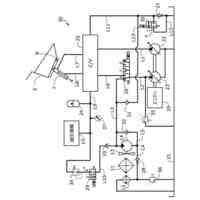
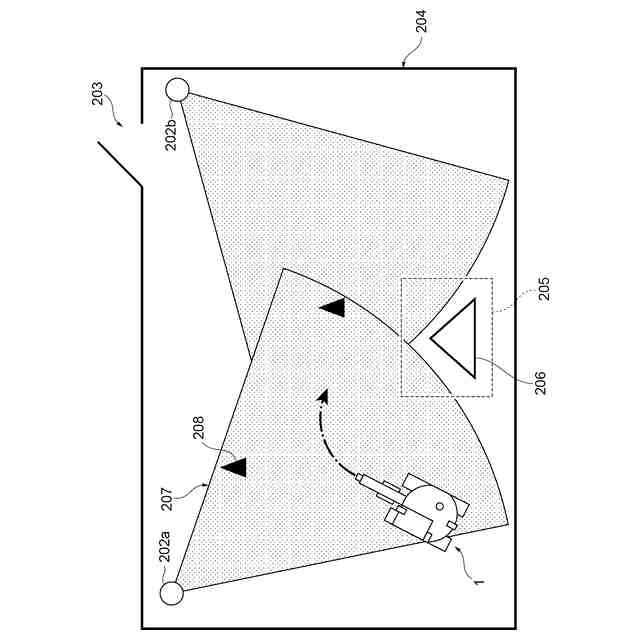
本発明の一実施例における施工現場環境の一例を示す図。
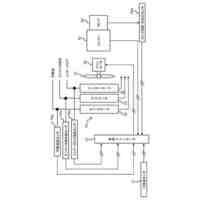
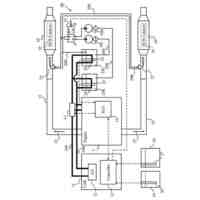
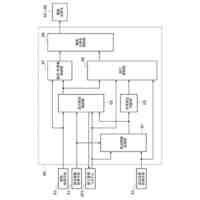
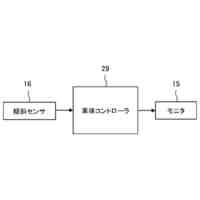
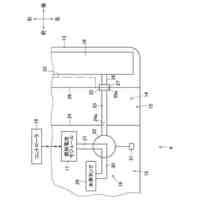
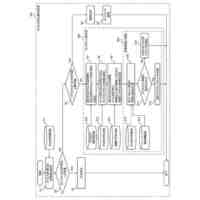
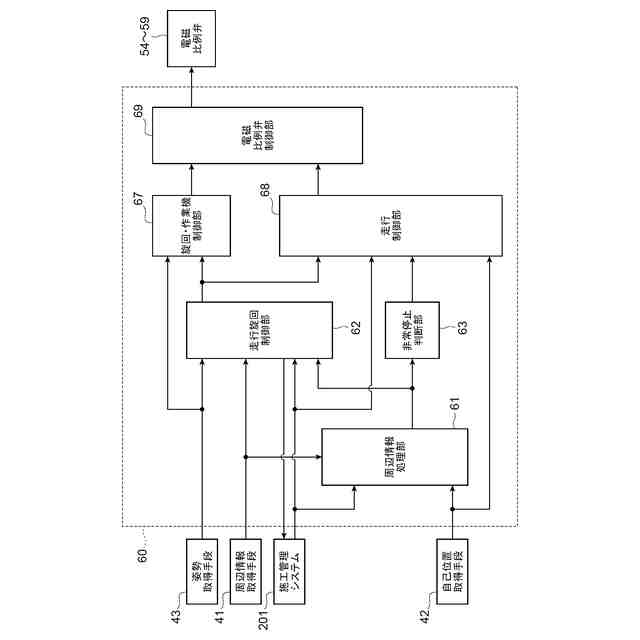
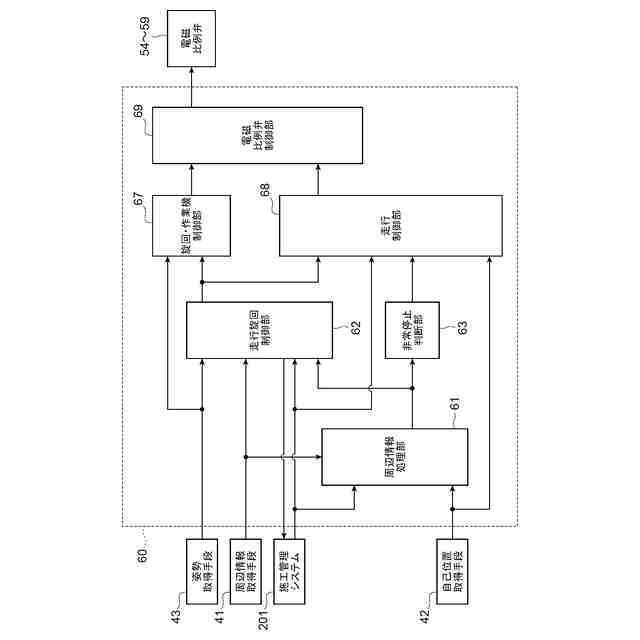
本発明の一実施例における動作コントローラの一例を示す機能ブロック図。
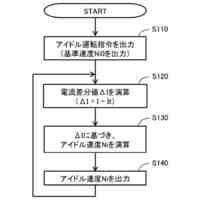
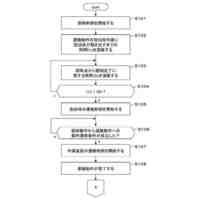
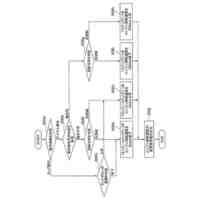
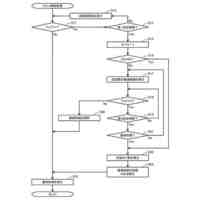
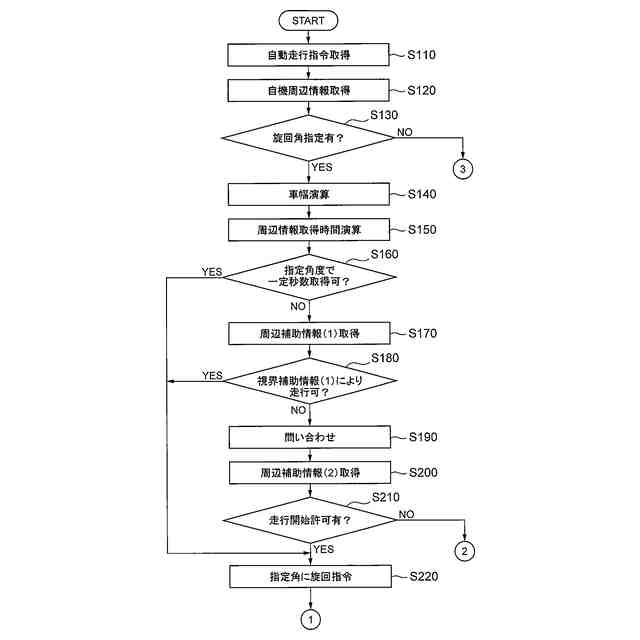
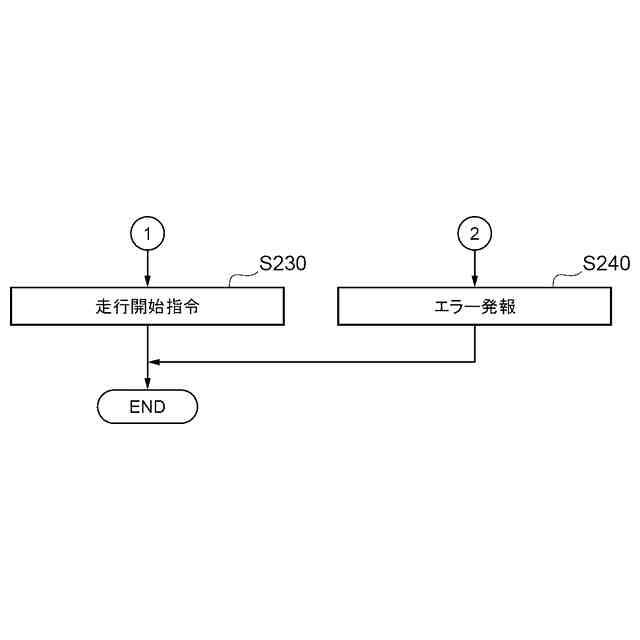
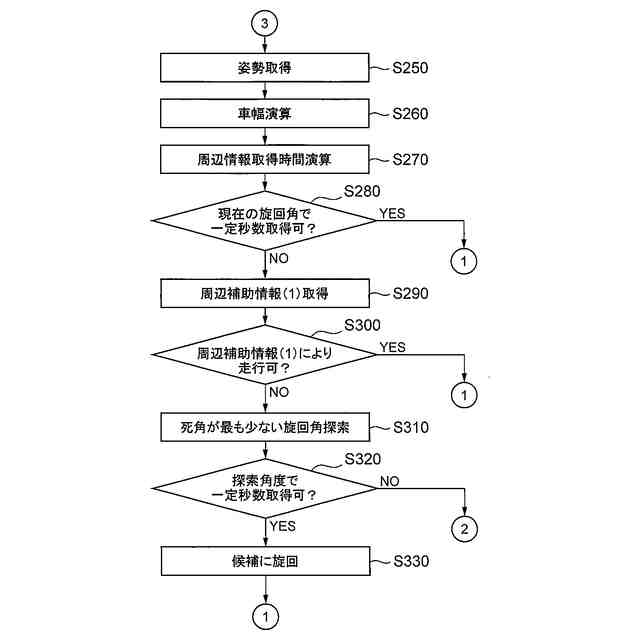
本発明の一実施例における走行旋回制御部が実行する処理を示すフローチャート。
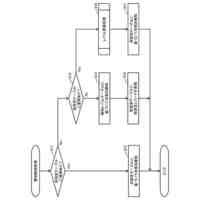
本発明の一実施例における走行旋回制御部が実行する処理を示すフローチャート。
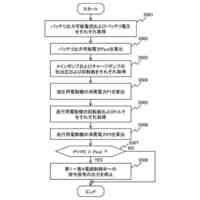
本発明の一実施例における走行旋回制御部が実行する処理を示すフローチャート。
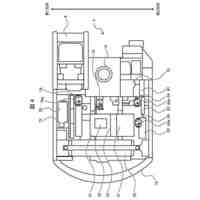
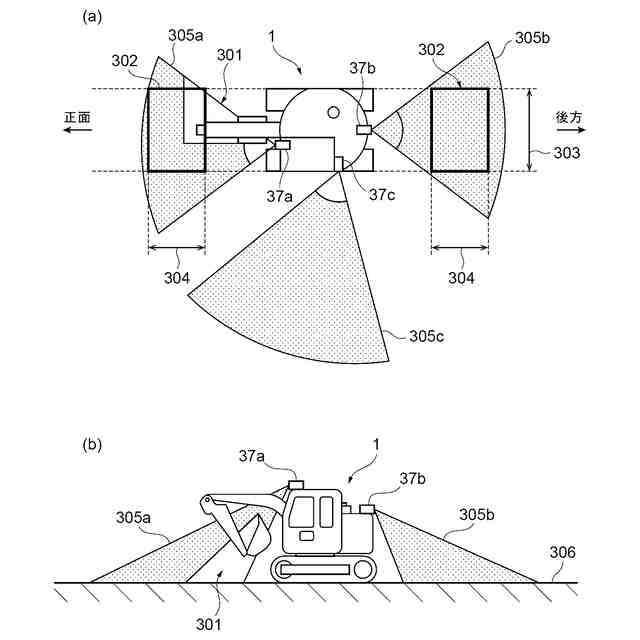
本発明の一実施例におけるショベルの周辺情報の取得範囲の一例を示す図。
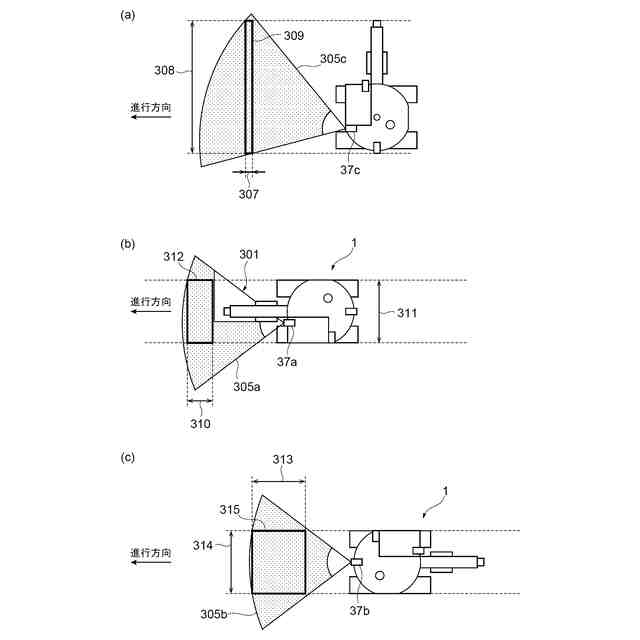
本発明の一実施例におけるショベルの旋回角探索の一例を示す概念図。
本発明の一実施例における第二閾値時間を説明するための図。
【発明を実施するための形態】
【0010】
以下、本発明の実施例について図面を用いて説明する。なお、以下では、作業機の先端の作業具(アタッチメント)としてバケット10を備える油圧ショベル1を例示するが、バケット以外のアタッチメントを備える作業機械に対して本発明を適用しても構わない。さらに、走行方式がクローラ式であれば油圧ショベル以外の作業機械への適用も可能である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
23日前
日立建機株式会社
走行装置
26日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
運搬車両
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業車両
25日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
建設機械
23日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
19日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
建設機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
電動式作業車両
29日前
日立建機株式会社
ダンプトラック
23日前
日立建機株式会社
ホイールローダ
1か月前
日立建機株式会社
ダンプトラック
29日前
日立建機株式会社
建設機械の旋回装置
25日前
日立建機株式会社
潤滑油診断システム
24日前
日立建機株式会社
コントロールバルブ
23日前
日立建機株式会社
作業機械の制御装置
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ