TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025053883
公報種別
公開特許公報(A)
公開日
2025-04-07
出願番号
2023162979
出願日
2023-09-26
発明の名称
作業機械の制御装置
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E02F
3/43 20060101AFI20250331BHJP(水工;基礎;土砂の移送)
要約
【課題】手動あるいは自動での掘削時にバケットが掘削地形と干渉し、非効率的な掘削動作が行われる時があるため、作業装置を備える作業機械において、作業装置の地面との干渉を避け、効率的な掘削を実現することができる作業機械の制御装置を提供する。
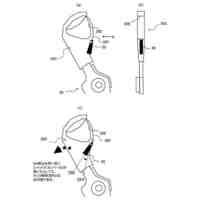
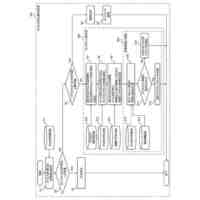
【解決手段】バケット10上に設定された干渉範囲が、作業装置の掘削動作により変化した地形形状である掘削地形に干渉しないように、作業装置の動作を制御する。
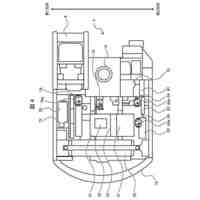
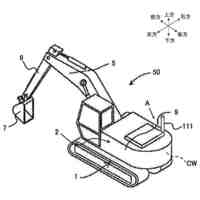
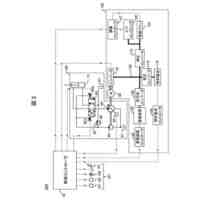
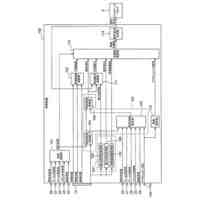
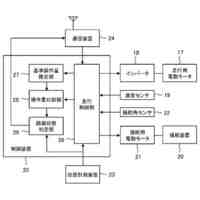
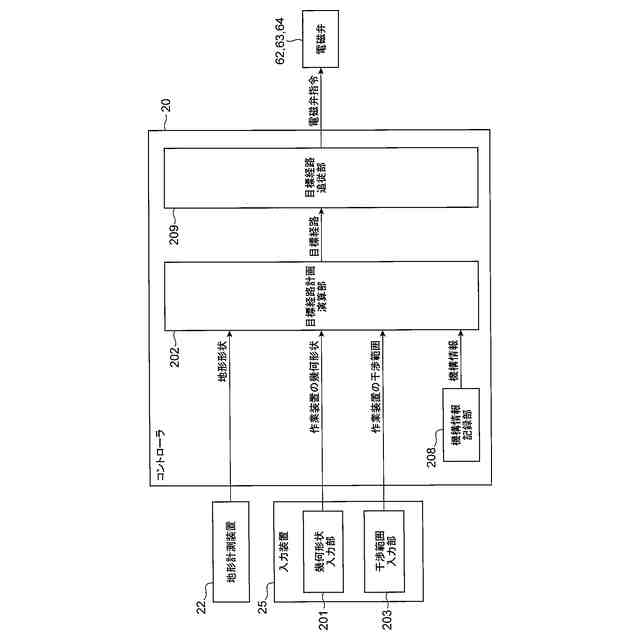
【選択図】図2
特許請求の範囲
【請求項1】
バケットを有する多関節型の作業装置を備える作業機械の制御装置であって、
前記制御装置は、前記バケットの形状情報と、前記作業装置の寸法情報と、前記作業装置の姿勢情報とに基づき、前記作業装置の掘削動作により変化した地形形状である掘削地形を演算し、前記バケット上に設定された干渉範囲が、前記掘削地形に干渉しないように、前記作業装置の動作を制御することを特徴とする作業機械の制御装置。
続きを表示(約 970 文字)
【請求項2】
請求項1に記載の作業機械の制御装置において、
前記制御装置は、地形計測装置から地形形状を取得し、
前記制御装置は、前記作業装置の目標姿勢情報を含む目標経路を計画し、計画した前記目標経路に追従するように前記作業装置の動作を制御し、
前記制御装置は、前記バケットの形状情報と、前記作業装置の寸法情報と、前記作業装置の目標姿勢情報と、前記地形形状とに基づき、前記干渉範囲が前記掘削地形に干渉しない目標経路を計画し、前記目標経路に追従するように前記作業装置の動作を制御することを特徴とする作業機械の制御装置。
【請求項3】
請求項1に記載の作業機械の制御装置において、
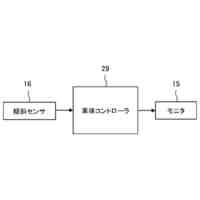
前記制御装置は、前記作業装置を操作する操作装置から操作信号を入力し、前記作業装置の姿勢情報を検出する姿勢検出装置から前記姿勢情報を入力し、
前記制御装置は、前記操作装置から入力した操作信号に基づき前記作業装置の動作を制御し、
前記制御装置は、前記バケットの形状情報と、前記作業装置の寸法情報と、前記作業装置の姿勢情報とに基づき、前記掘削地形を演算し、前記干渉範囲が前記掘削地形に干渉しないように、前記操作装置からの操作信号に基づく前記作業装置の動作に介入することを特徴とする作業機械の制御装置。
【請求項4】
請求項3に記載の作業機械の制御装置において、
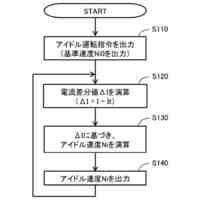
前記制御装置は、前記干渉範囲が前記掘削地形に干渉しない最大角度を演算し、前記作業装置の現在の角度が前記最大角度より小さい場合、前記操作装置の操作信号に従って前記作業装置を動作させ、前記作業装置の現在の角度が前記最大角度である場合、前記作業装置の動作を停止させ、前記作業装置の現在の角度が前記最大角度より大きい場合、前記操作装置の操作信号のうち、前記作業装置の現在の角度が前記最大角度に近づく方向の操作信号のみに従って前記作業装置を動作させることを特徴とする作業機械の制御装置。
【請求項5】
請求項3に記載の作業機械の制御装置において、
前記制御装置は、前記操作装置からの操作信号に基づく前記作業装置の動作に介入していることを表示する表示装置を備えることを特徴とする作業機械の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の掘削制御を行う制御装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
油圧ショベル等の作業機械において、掘削作業に対して補助を行う作業機械が提案されている。
【0003】
例えば、特許文献1では、予め定められた掘削曲線の比率に従って、作業機械が備える作業機(以下、作業装置またはバケットとも称する)の目標経路を計画し、その目標経路に沿った制御を行う制御装置が提案されている。
【0004】
また、特許文献2では、地面深さおよび予め入力された土砂特性を基に、土砂がバケットに与える力(以下、掘削反力と称する)を取得し、その掘削反力が予め定めた上限値より大きいか否かによって、掘削動作の修正要否を判断する制御装置が提案されている。
【先行技術文献】
【特許文献】
【0005】
特許第7088792号公報
特許第5519414号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1によれば、作業機械が備える作業機の目標掘削経路を生成し、その目標掘削経路に沿った制御を行うことができる。特許文献2によれば、掘削負荷に応じて掘削動作を修正することができる。
【0007】
しかしながら、特許文献1および特許文献2の制御方法は、バケットの角度の制御について掘削に適した条件を十分考慮していると言い難い。例えば、掘削中にバケットの角度をクラウド(起こし)方向に大きくした場合、それまでの掘削によって形成された掘削地形とバケットとが干渉する場合がある。例えば、バケットの背面(底面)が掘削地形に干渉した場合(図20参照)、掘削地形からバケットの背面に作用する反力が増加することによって油圧エネルギーを過剰に消費したり、車体が浮き上がることによって車体の姿勢が不安定となったりするため、効率的な掘削とは言い難い。
【0008】
本発明は、上記を鑑みてなされたものであり、作業装置を備える作業機械において、作業装置の地面との干渉を避け、効率的な掘削を実現することができる作業機械の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記課題を解決するため、本発明の作業機械の制御装置は、バケットを有する多関節型の作業装置を備える作業機械の制御装置であって、前記制御装置は、前記バケットの形状情報と、前記作業装置の寸法情報と、前記作業装置の姿勢情報とに基づき、前記作業装置の掘削動作により変化した地形形状である掘削地形を演算し、前記バケット上に設定された干渉範囲が、前記掘削地形に干渉しないように、前記作業装置の動作を制御することを特徴とする。
【発明の効果】
【0010】
本発明によれば、作業装置と掘削地形が干渉しない効率的な掘削が実現できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
建設機械
26日前
日立建機株式会社
作業車両
26日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
26日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
運搬車両
26日前
日立建機株式会社
建設機械
26日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
建設機械
26日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
20日前
日立建機株式会社
走行装置
27日前
日立建機株式会社
作業機械
26日前
日立建機株式会社
ダンプトラック
24日前
日立建機株式会社
作業機械の制御装置
27日前
日立建機株式会社
建設機械の旋回装置
26日前
日立建機株式会社
電気駆動式作業車両
27日前
日立建機株式会社
作業機械の管理装置
27日前
日立建機株式会社
潤滑油診断システム
25日前
日立建機株式会社
コントロールバルブ
24日前
日立建機株式会社
電動式ダンプトラック
24日前
日立建機株式会社
作業機械のドリンクホルダ
25日前
日立建機株式会社
ダンプトラックの走行装置
25日前
日立建機株式会社
運搬車両及び管制システム
19日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ