TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025062854
公報種別
公開特許公報(A)
公開日
2025-04-15
出願番号
2023172197
出願日
2023-10-03
発明の名称
運搬車両及び管制システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
B60W
40/068 20120101AFI20250408BHJP(車両一般)
要約
【課題】簡便な方法で走行路面の状態を把握することができる運搬車両及び管制システムを提供する。
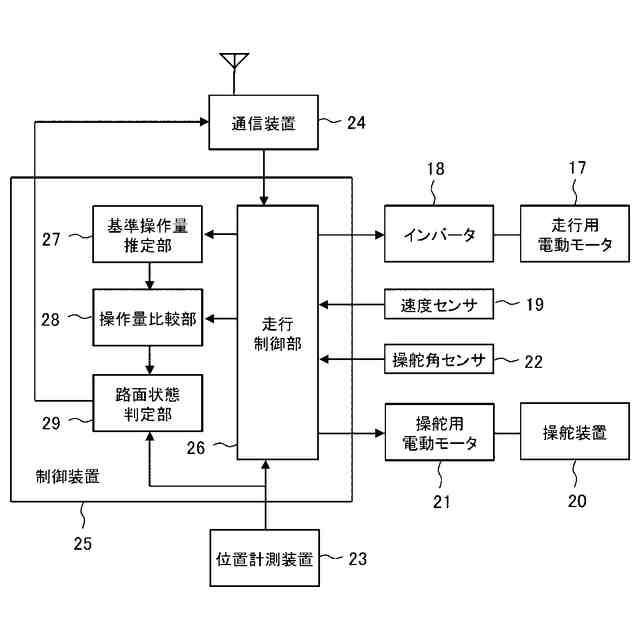
【解決手段】ダンプトラック1は、後輪15を駆動する走行用電動モータ17と、前輪16を操舵する操舵装置20と、走行用電動モータ17の操作量を検出するインバータ18と、操舵装置20の操作量を検出する操舵角センサ22と、目標経路及び目標速度に従って自律走行を行うための走行用電動モータ17および操舵装置20の操作量を演算し、演算された操作量に基づいた走行制御を行う制御装置25とを備える。制御装置25は、走行路面が基準状態である場合の操舵装置20の操作量である基準操作量を推定する基準操作量推定部27と、基準操作量推定部27で推定された基準操作量と演算された操舵装置20の操作量とを比較する操作量比較部28と、操作量比較部28の比較結果に基づき、走行路面が基準状態より滑り易いかどうかを判定し、その判定結果を出力する路面状態判定部29と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
後輪を駆動する駆動装置と、前輪を操舵する操舵装置と、
前記駆動装置および前記操舵装置の操作量を検出する検出器と、
目標経路及び目標速度に従って自律走行を行うための前記駆動装置および前記操舵装置の操作量を演算し、演算された前記操作量に基づいた走行制御を行う制御装置とを備えた運搬車両において、
前記制御装置は、
走行路面が基準状態である場合の前記駆動装置および前記操舵装置の少なくとも一方の操作量である基準操作量を推定する基準操作量推定部と、
前記基準操作量推定部で推定された前記基準操作量と、その推定された基準操作量に対応する操作量であって、演算された若しくは前記検出器で検出された前記駆動装置および前記操舵装置の少なくとも一方の操作量とを比較する操作量比較部と、
前記操作量比較部の比較結果に基づき、前記走行路面が前記基準状態より滑り易いかどうかを判定し、その判定結果を出力する路面状態判定部と、を有することを特徴とする運搬車両。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の運搬車両において、
前記基準操作量推定部は、基準操作量として前記操舵装置の基準操舵角を推定し、
前記操作量比較部は、演算された若しくは前記検出器で検出された前記操舵装置の操舵角と前記基準操作量推定部で推定された基準操舵角とを比較することを特徴とする運搬車両。
【請求項3】
請求項1に記載の運搬車両において、
前記基準操作量推定部は、基準操作量として前記駆動装置の基準制駆動トルクを推定し、
前記操作量比較部は、演算された前記駆動装置の制駆動トルクと前記基準操作量推定部で推定された基準制駆動トルクとを比較することを特徴とする運搬車両。
【請求項4】
請求項1に記載の運搬車両において、
前記基準操作量推定部は、走行条件に基づいて前記基準操作量を演算することを特徴とする運搬車両。
【請求項5】
請求項1に記載の運搬車両において、
前記基準操作量推定部は、前記走行路面が前記基準状態である場合に演算された若しくは検出器で検出された前記操作量を、基準操作量として記憶することを特徴とする運搬車両。
【請求項6】
目標経路及び目標速度を送信する管制装置と、
前記目標経路及び前記目標速度を受信し、前記目標経路及び前記目標速度に従って自律走行を行うための駆動装置および操舵装置に対する操作量を演算し、演算された前記操作量に基づいて前記駆動装置および前記操舵装置を制御して走行制御を行う制御装置を備えた運搬車両と、を備えた管制システムにおいて、
前記運搬車両の前記制御装置は、
走行路面が基準状態である場合の前記駆動装置および前記操舵装置の少なくとも一方の前記操作量である基準操作量を推定する基準操作量推定部と、
前記基準操作量推定部で推定された前記基準操作量と、その推定された基準操作量に対応する操作量であって、演算された若しくは前記運搬車両の検出器で検出された前記駆動装置および前記操舵装置の少なくとも一方の操作量とを比較する操作量比較部と、
前記操作量比較部の比較結果に基づき、前記走行路面が前記基準状態より滑り易いかどうかを判定し、その判定結果を出力する路面状態判定部と、を有し、
前記管制装置は、
前記路面状態判定部の判定結果に基づき、前記目標経路及び前記目標速度を設定することを特徴とする管制システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、運搬車両及び管制システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
運搬車両の一つであるダンプトラックは、例えば鉱山にて鉱石等を運搬する作業を行う。詳しく説明すると、ダンプトラックは、積込場で鉱石等を積載し、搬送路を走行し、放土場で鉱石等を排出する。その後、搬送路を走行して積込場に戻る。ダンプトラックは、このよう作業を何回も繰り返す。
【0003】
特許文献1は、ダンプトラックの自律走行に関する指示を送信する管制装置を開示する。管制装置は、ダンプトラックへ目標経路及び目標速度を送信する。ダンプトラックに搭載された制御装置は、目標経路及び目標速度に従って自律走行を行うための駆動装置及び操舵装置の操作量を演算し、演算された操作量に基づいた走行制御を行う。
【先行技術文献】
【特許文献】
【0004】
特開2020-157923号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
運搬車両の作業効率を表す指標として、例えば、単位時間当たりの運搬量を用いる。この指標によれば、運搬車両の速度を速くすれば、運搬車両の作業効率が向上する。しかし、運搬車両の速度は、走行安全性の観点から、制限される。特に、天候の影響を受けて走行路面が滑り易くなれば、運搬車両の制限速度を低くする必要がある。したがって、運搬車両の走行安全性を確保しつつ、運搬車両の作業効率を高めるため、走行路面の状態を把握した上で、運搬車両の目標速度を設定することが望ましい。
【0006】
本発明は、上記事柄に鑑みてなされたものであり、その目的は、簡便な方法で走行路面の状態を把握することができる運搬車両及び管制システムを提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、代表的な本発明は、後輪を駆動する駆動装置と、前輪を操舵する操舵装置と、前記駆動装置および前記操舵装置の操作量を検出する検出器と、目標経路及び目標速度に従って自律走行を行うための前記駆動装置および前記操舵装置の操作量を演算し、演算された前記操作量に基づいた走行制御を行う制御装置とを備えた運搬車両において、前記制御装置は、走行路面が基準状態である場合の前記駆動装置および前記操舵装置の少なくとも一方の操作量である基準操作量を推定する基準操作量推定部と、前記基準操作量推定部で推定された前記基準操作量と、その推定された基準操作量に対応する操作量であって、演算された若しくは前記検出器で検出された前記駆動装置および前記操舵装置の少なくとも一方の操作量とを比較する操作量比較部と、前記操作量比較部の比較結果に基づき、前記走行路面が前記基準状態より滑り易いかどうかを判定し、その判定結果を出力する路面状態判定部と、を有する。
【発明の効果】
【0008】
本発明によれば、簡便な方法で走行路面の状態を把握することができる。
【図面の簡単な説明】
【0009】
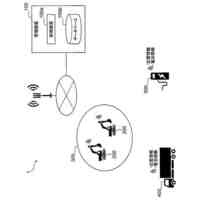
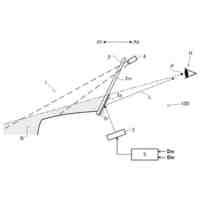
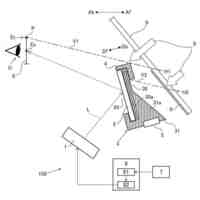
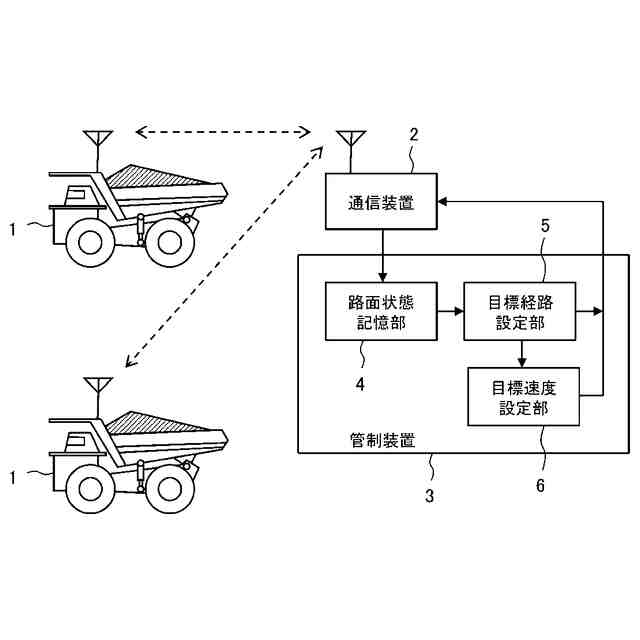
本発明の第1の実施形態における管制システムの構成を表す図である。
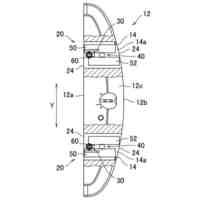
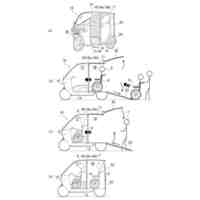
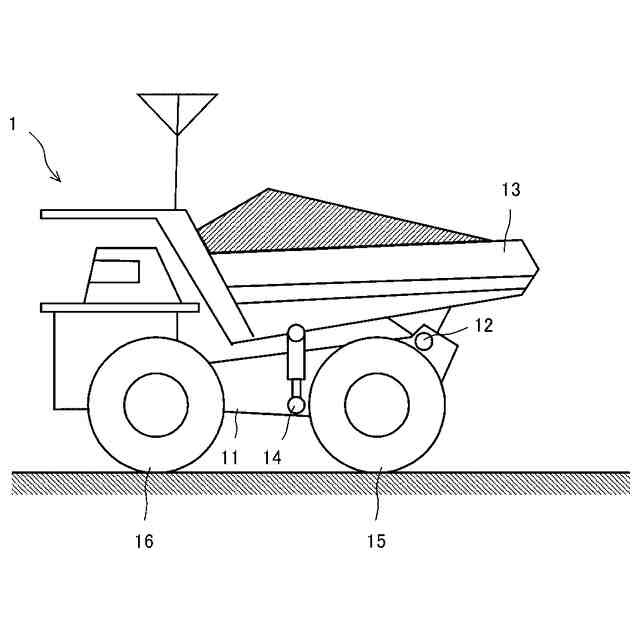
本発明の第1の実施形態におけるダンプトラックの構造を表す側面図である。
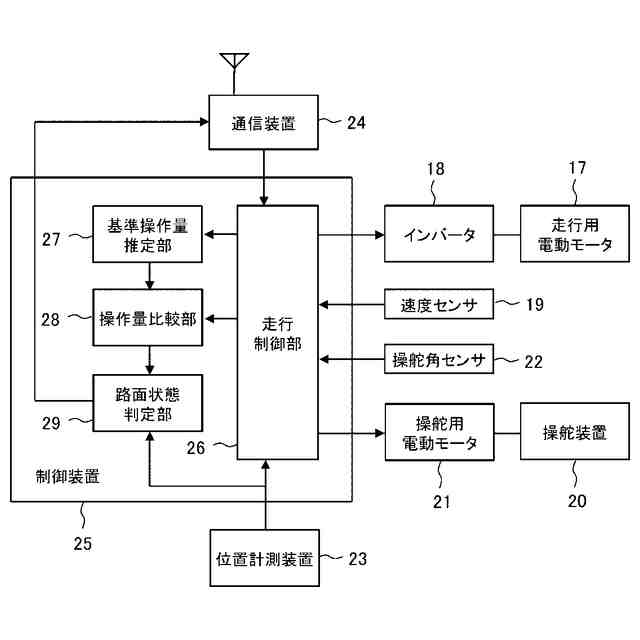
本発明の第1の実施形態におけるダンプトラックに搭載された機器を表すブロック図である。
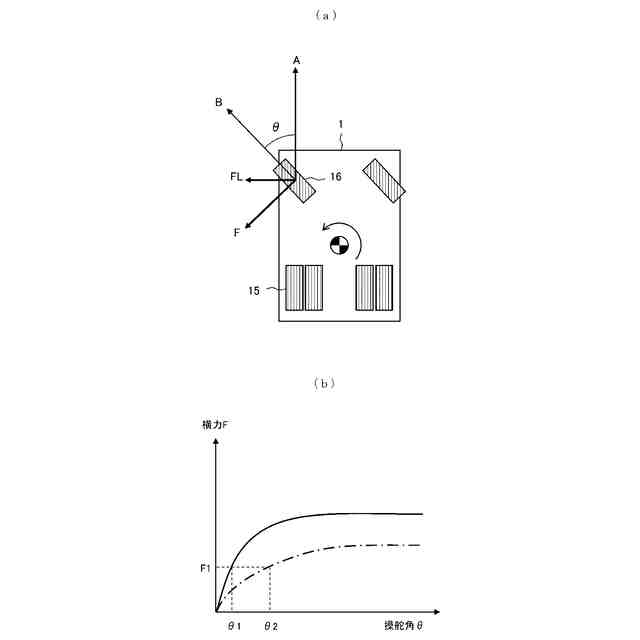
本発明の第1の実施形態におけるダンプトラックの前輪の操舵角と前輪の横力との関係を表す図である。
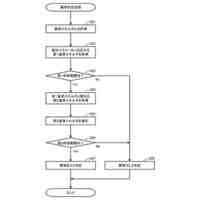
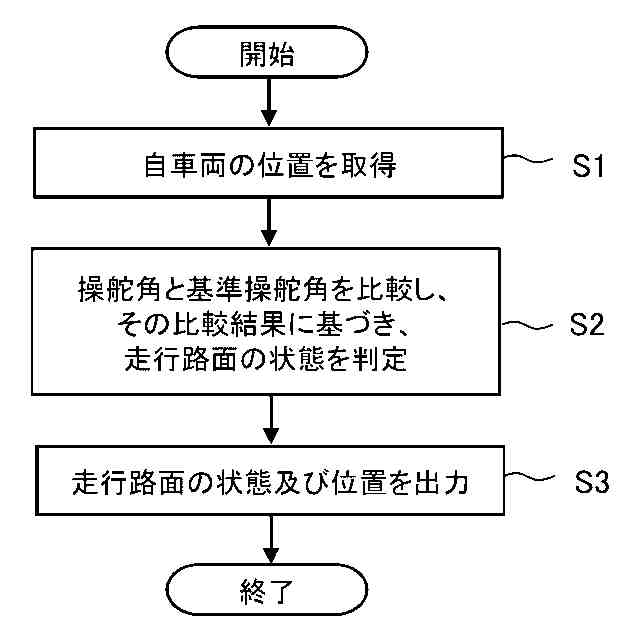
本発明の第1の実施形態におけるダンプトラックの制御装置の路面状態判定処理を表すフローチャートである。
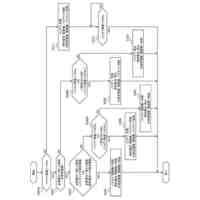
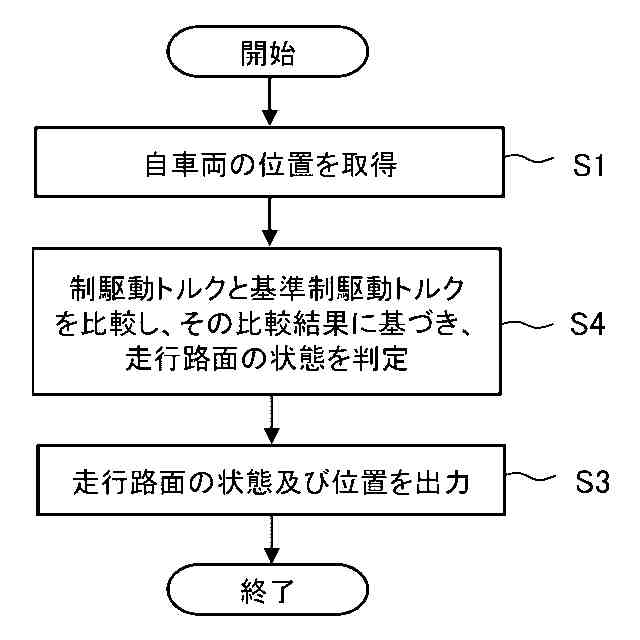
本発明の第2の実施形態におけるダンプトラックの制御装置の路面状態判定処理を表すフローチャートである。
【発明を実施するための形態】
【0010】
本発明の第1の実施形態を、図面を参照しつつ説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
日立建機株式会社
作業機械
6日前
日立建機株式会社
充電支援システム
4日前
日立建機株式会社
部品需要予測装置
7日前
日立建機株式会社
制御弁装置および作業機械
5日前
日立建機株式会社
カウンタウエイト及び作業機械
18日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
電動式建設機械
14日前
個人
カーテント
3か月前
個人
タイヤレバー
1か月前
個人
車窓用防虫網戸
3か月前
個人
警告装置
4か月前
個人
前輪キャスター
7日前
個人
小型EVシステム
4か月前
個人
ルーフ付きトライク
24日前
個人
ホイルのボルト締結
2か月前
個人
車輪清掃装置
3か月前
個人
タイヤ脱落防止構造
4日前
日本精機株式会社
ケース
4か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
14日前
個人
キャンピングトライク
2か月前
個人
車両通過構造物
1か月前
井関農機株式会社
作業車両
2か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
日本精機株式会社
表示装置
1か月前
個人
ワイパーゴム性能保持具
3か月前
個人
アクセルのソフトウェア
2か月前
個人
車両用スリップ防止装置
2か月前
個人
ブレーキシステム
5か月前
個人
キャンピングトレーラー
2か月前
個人
乗合路線バスの客室装置
1か月前
株式会社豊田自動織機
産業車両
28日前
井関農機株式会社
収穫作業車両
3か月前
株式会社クラベ
ヒータユニット
3か月前
日本精機株式会社
車載表示装置
2か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ