TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025056408
公報種別
公開特許公報(A)
公開日
2025-04-08
出願番号
2023165863
出願日
2023-09-27
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20250401BHJP(水工;基礎;土砂の移送)
要約
【課題】作業装置が単独で動作している状態から、旋回動作を必要とする動作への遷移を滑らかに行うことで生産性の向上を図る。
【解決手段】作業機械は、走行体と、旋回体と、作業装置と、旋回体及び作業装置の姿勢を検出する姿勢検出装置と、作業装置により掘削された掘削物が積み込まれる被積込機械のベッセルの位置を検出するベッセル位置検出装置と、姿勢検出装置及びベッセル位置検出装置の検出結果に基づいて、少なくとも旋回体を旋回完了角度まで自動で旋回させる自動旋回制御を行う制御装置と、を備える。制御装置は、旋回体の旋回動作状態及び作業装置の動作状態に基づいて、自動旋回制御を開始する旋回開始条件が成立したか否かを判断する。制御装置は、旋回開始条件が成立したと判断した場合には、作業装置が動作している状態にあるか否かに関わらず、旋回体を旋回完了角度に向かって旋回開始させる旋回動作開始指令を出力する。
【選択図】図10
特許請求の範囲
【請求項1】
走行体と、
前記走行体に対して旋回可能に設けられる旋回体と、
前記旋回体に取り付けられ、ブーム、アーム及びバケットを有する作業装置と、
前記旋回体の姿勢、及び前記作業装置の姿勢を検出する姿勢検出装置と、
前記作業装置により掘削された掘削物が積み込まれる被積込機械のベッセルの位置を検出するベッセル位置検出装置と、
前記姿勢検出装置及び前記ベッセル位置検出装置の検出結果に基づいて、少なくとも前記旋回体を目標となる旋回角度である旋回完了角度まで自動で旋回させる自動旋回制御を行う制御装置と、を備えた作業機械において、
前記制御装置は、
前記旋回体の旋回動作状態及び前記作業装置の動作状態に基づいて、前記旋回体の前記自動旋回制御を開始する旋回開始条件が成立したか否かを判断し、
前記旋回開始条件が成立したと判断した場合には、前記作業装置が動作している状態にあるか否かに関わらず、前記旋回開始条件が成立したタイミングで、前記旋回体を前記旋回完了角度に向かって旋回開始させる旋回動作開始指令を出力する、
ことを特徴とする作業機械。
続きを表示(約 1,800 文字)
【請求項2】
請求項1に記載の作業機械において、
前記制御装置は、
前記姿勢検出装置の検出結果に基づき前記バケットの対地角を演算し、
前記バケットの対地角が動作完了角度となるまで自動で前記作業装置を動作させ、
前記旋回体の旋回動作が停止し、かつ、前記バケットの対地角が前記動作完了角度に近づくように、前記作業装置が自動で動作している状態において、前記旋回開始条件が成立したか否かを判断する、
ことを特徴とする作業機械。
【請求項3】
請求項2に記載の作業機械において、
前記制御装置は、前記旋回動作開始指令を現時点で出力した場合に、前記バケットの対地角が前記動作完了角度に至った後に前記旋回体の旋回が開始されることが予測されると、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
前記制御装置は、
前記旋回動作開始指令が出力されてから前記旋回体の動作が開始されるまでの第1時間を演算し、
現時点から前記バケットの対地角が前記動作完了角度に至るまでの第2時間を演算し、
前記第2時間が前記第1時間よりも短くなった場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項5】
請求項2に記載の作業機械において、
前記動作完了角度は、前記作業装置が前記ベッセルの上方で前記バケット内の掘削物を放出する動作の完了角度であり、
前記制御装置は、前記旋回動作開始指令を現時点で出力した場合に、前記バケットの対地角が前記動作完了角度に至る前に前記旋回体の旋回が開始され、かつ、前記バケットの対地角が前記動作完了角度に至った後に前記バケットが前記ベッセルの外に出始めることが予測されると、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項6】
請求項5に記載の作業機械において、
前記制御装置は、
前記旋回動作開始指令が出力されてから前記旋回体の動作が開始されるまでの第1時間を演算し、
現時点から前記バケットの対地角が前記動作完了角度に至るまでの第2時間を演算し、
前記旋回体の動作が開始されてから前記バケットが前記ベッセルの外に出始めるまでの第3時間を演算し、
前記第2時間が前記第1時間と前記第3時間の和よりも短くなった場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項7】
請求項1に記載の作業機械において、
前記制御装置は、前記バケット内の前記掘削物の重量が所定重量に達した場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項8】
請求項7に記載の作業機械において、
前記制御装置は、
前記バケット内の前記掘削物の重量を取得し、
取得した前記バケット内の前記掘削物の重量が前記所定重量に達した場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項9】
請求項7に記載の作業機械において、
前記制御装置は、
前記旋回体の旋回動作が停止し、かつ、前記掘削物を掘削するために前記作業装置が動作している状態において、前記旋回開始条件が成立したか否かを判断し、
前記バケット内の前記掘削物の重量が前記所定重量まで増加した場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
【請求項10】
請求項7に記載の作業機械において、
前記制御装置は、
前記旋回体の旋回動作が停止し、かつ、前記掘削物を放出するために前記作業装置が動作している状態において、前記旋回開始条件が成立したか否かを判断し、
前記バケット内の前記掘削物の重量が放出動作前から所定割合の重量分だけ放出されることによって前記所定重量まで減少した場合に、前記旋回開始条件が成立したと判断する、
ことを特徴とする作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
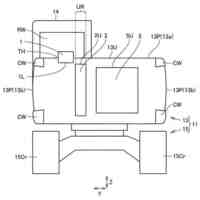
走行体に旋回可能に取り付けられた旋回体と、旋回体に取り付けられた多関節型の作業装置と、を備えた油圧ショベルなどの作業機械が知られている。油圧ショベルに取り付けられる作業装置は、旋回体に回動可能に取り付けられるブームと、ブームに回動可能に取り付けられるアームと、アームに回動可能に取り付けられるバケットと、を有する。
【0003】
油圧ショベルは、土砂等の掘削物を掘削する掘削動作と、掘削物をダンプトラック等の被積込機械の荷台の上方まで運搬する運搬動作と、掘削物を被積込機械の荷台に放出する放出動作と、掘削位置まで作業装置を移動させる戻り動作とを行って掘削物の掘削積込作業を行う。
【0004】
特許文献1には、戻り動作を自動で行う作業機械(積込機械)の制御装置及び制御方法が開示されている。この特許文献1には、「積込機械の制御装置は、旋回中心回りに旋回する旋回体と、バケットを有し前記旋回体に取り付けられた作業機とを備える積込機械の制御装置であって、積込対象の位置および形状を特定する積込対象特定部と、前記積込対象の位置および形状に基づいて前記積込対象より所定距離だけ外側の位置である干渉回避位置を特定する回避位置特定部と、前記バケットが前記積込対象上の積込位置から前記干渉回避位置に到達するまで前記旋回体のみを駆動させて前記バケットを前記干渉回避位置へ移動させる操作信号を出力し、前記バケットが前記干渉回避位置に到達した後に前記旋回体および前記作業機を駆動させて前記バケットを掘削対象上の掘削位置へ移動させる操作信号を出力する移動処理部とを備える。」と記載されている。
【先行技術文献】
【特許文献】
【0005】
特開2020-41352号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1には、「自動掘削積込制御を連続して実行する場合には、空荷旋回開始位置P01は、積込位置P07と一致する。」、「アーム132の先端部の位置Pが積込位置P07に至ったとき、旋回体120の旋回は停止している。」「移動処理部1112は、バケット133が積込位置P07に到達すると、バケット133をダンプ方向へ回転させるためのダンプ操作信号を生成する。」との記載がある。つまり、特許文献1に記載の技術では、バケットを回動させて被積込機械へ放土を行っている間、旋回体は停止している。このため、戻り動作を行うには、放土が完了した後、旋回体を旋回させるための旋回動作指令を出力する必要がある。
【0007】
しかしながら、旋回動作指令が出力されてから旋回体が実際に動き出すまでには時間を要する。そのため、特許文献1に記載の技術では、放土動作の完了タイミングと実際の旋回の開始タイミングとの間に生じるずれに起因して、生産性(作業効率)が低下する恐れがある。
【0008】
本発明は、作業装置が単独で動作している状態(例えば、掘削動作、あるいは放出動作が行われている状態)から、旋回動作を必要とする動作(例えば、運搬動作、あるいは戻り動作)への遷移を滑らかに行うことで生産性の向上を図ることを目的とする。
【課題を解決するための手段】
【0009】
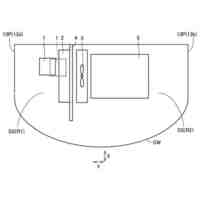
本発明の一態様による作業機械は、走行体と、前記走行体に対して旋回可能に設けられる旋回体と、前記旋回体に取り付けられ、ブーム、アーム及びバケットを有する作業装置と、前記旋回体の姿勢、及び前記作業装置の姿勢を検出する姿勢検出装置と、前記作業装置により掘削された掘削物が積み込まれる被積込機械のベッセルの位置を検出するベッセル位置検出装置と、前記姿勢検出装置及び前記ベッセル位置検出装置の検出結果に基づいて、少なくとも前記旋回体を目標となる旋回角度である旋回完了角度まで自動で旋回させる自動旋回制御を行う制御装置と、を備える。前記制御装置は、前記旋回体の旋回動作状態及び前記作業装置の動作状態に基づいて、前記旋回体の前記自動旋回制御を開始する旋回開始条件が成立したか否かを判断し、前記旋回開始条件が成立したと判断した場合には、前記作業装置が動作している状態にあるか否かに関わらず、前記旋回開始条件が成立したタイミングで、前記旋回体を前記旋回完了角度に向かって旋回開始させる旋回動作開始指令を出力する。
【発明の効果】
【0010】
本発明によれば、作業装置が単独で動作している状態から、旋回動作を必要とする動作への遷移を滑らかに行うことで生産性の向上を図ることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
長尺平板パネル
27日前
個人
透過型堰堤
14日前
個人
構造物の検査方法
28日前
鹿島建設株式会社
鉄筋かご
12日前
株式会社東部
多翼型鋼管杭
1か月前
個人
津波防御三段壁浮上システム。
20日前
カナデビア株式会社
起伏ゲート
28日前
株式会社竹中工務店
壁接合工法
今日
中部電力株式会社
沈砂池
12日前
日本車輌製造株式会社
杭打機
1か月前
コベルコ建機株式会社
操作装置
今日
コベルコ建機株式会社
作業機械
12日前
中部美化企業株式会社
水門装置
6日前
コベルコ建機株式会社
作業機械
12日前
株式会社奥村組
建物の基礎構造
6日前
日立建機株式会社
建設機械
1か月前
株式会社クボタ
作業機
1か月前
コベルコ建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
1か月前
カナデビア株式会社
浮体構造体
20日前
鹿島建設株式会社
埋戻し方法
20日前
東陽商事株式会社
スイベルの共回り防止装置
14日前
カナデビア株式会社
係留装置及びその制御方法
28日前
構法開発株式会社
埋込継手構造
27日前
プレス工業株式会社
建設機械のキャビン
12日前
株式会社竹内製作所
土砂侵入防止構造
6日前
株式会社クボタ
フロントローダ及び作業車両
27日前
株式会社SEELS
フェンダー用カバー部材
21日前
株式会社小松製作所
作業車両
1日前
株式会社小松製作所
作業機械
1日前
コベルコ建機株式会社
作業機械
16日前
株式会社エンバイン
連結具及び盛土構造
20日前
キヤノン株式会社
移動体および撮像装置
1日前
マックストン株式会社
シート敷設用アンカーブロック
13日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ