TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025045903
公報種別
公開特許公報(A)
公開日
2025-04-02
出願番号
2023153939
出願日
2023-09-20
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/26 20060101AFI20250326BHJP(水工;基礎;土砂の移送)
要約
【課題】侵入不可領域の設定に関わるオペレータの作業負担を軽減することにより、作業効率を向上させることが可能な作業機械を提供する。
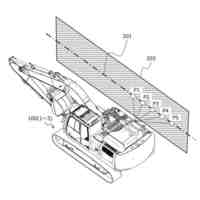
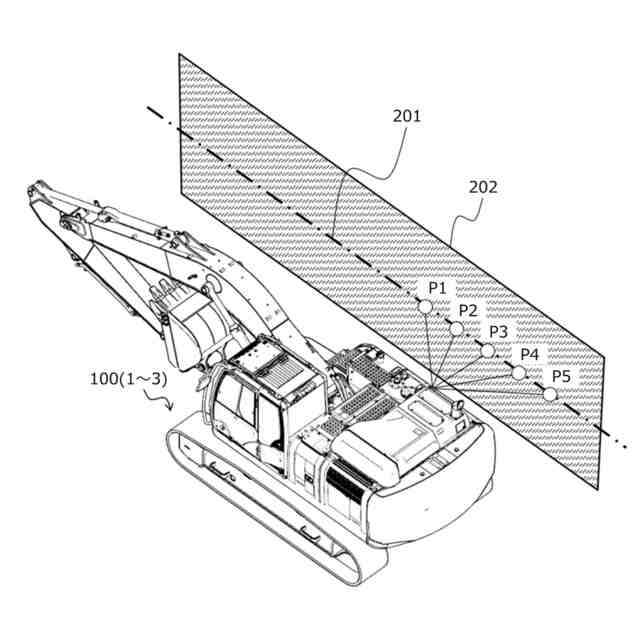
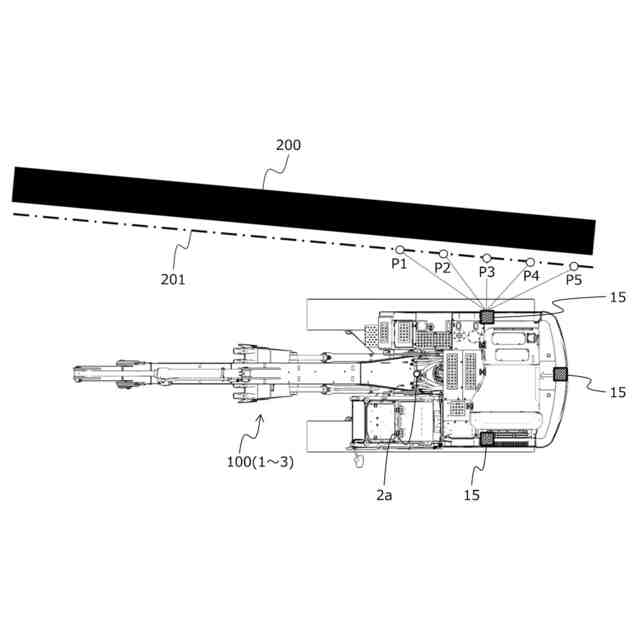
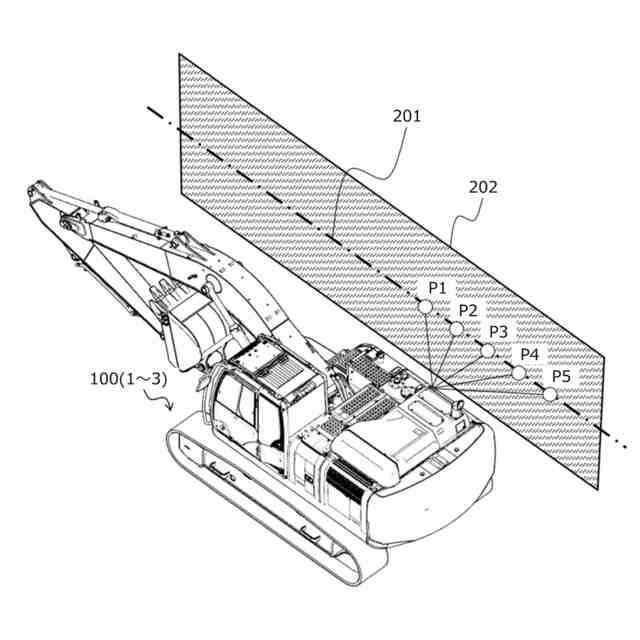
【解決手段】作業機械100は、車体1~3の周囲の物体を点群データとして取得する物体検出装置15を備え、車体コントローラ21は、上部旋回体2の旋回中心軸2aと直交する平面である旋回平面に投影させた前記物体の前記点群データを基に第1境界線201を算出し、第1境界線201を通りかつ旋回中心軸2aに平行な平面を侵入不可領域の境界面となる第1境界面202として設定する。
【選択図】 図5
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体上に旋回可能に取り付けられた上部旋回体と、
前記上部旋回体に上下方向に回動可能に取り付けられ、前記下部走行体および前記上部旋回体とともに車体を構成する作業装置と、
前記車体の侵入不可領域を設定し、前記車体が前記侵入不可領域に侵入しないように前記車体の動作を制御する車体コントローラとを備えた作業機械において、
前記車体の周囲の物体を点群データとして取得する物体検出装置を備え、
前記車体コントローラは、
前記上部旋回体の旋回中心軸と直交する平面である旋回平面に投影させた前記物体の前記点群データを基に第1境界線を算出し、
前記第1境界線を通りかつ前記旋回中心軸に平行な平面を前記侵入不可領域の境界面となる第1境界面として設定する
ことを特徴とする作業機械。
続きを表示(約 1,000 文字)
【請求項2】
請求項1に記載の作業機械において、
前記第1境界線は、前記点群データを基に結ばれる直線でなり、前記直線を少なくとも前記作業装置の側に延長して設定される
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記車体コントローラは、
前記作業装置の回動軸と直交する平面である回動平面に投影させた前記物体の前記点群データを基に第2境界線を算出し、
前記第2境界線を通りかつ前記回動軸に平行な平面を前記侵入不可領域の境界面となる第2境界面として設定する
ことを特徴とする作業機械。
【請求項4】
請求項1に記載の作業機械において、
前記車体コントローラは、
前記旋回平面に投影された前記物体の前記点群データを、前記旋回中心軸を基点とする2つの半直線で挟み込み、前記2つの半直線で挟まれた領域を前記点群データが存在する領域と存在しない領域とに分かつ線分を前記第1境界線として算出し、
前記2つの半直線のうち前記第1境界線との交点を基点として前記旋回中心軸とは反対方向に伸びる2つの半直線を前記侵入不可領域の第3境界線として算出し、
前記第3境界線を通りかつ前記旋回中心軸に平行な平面を前記侵入不可領域の境界面となる第3境界面として設定する
ことを特徴とする作業機械。
【請求項5】
請求項1に記載の作業機械において、
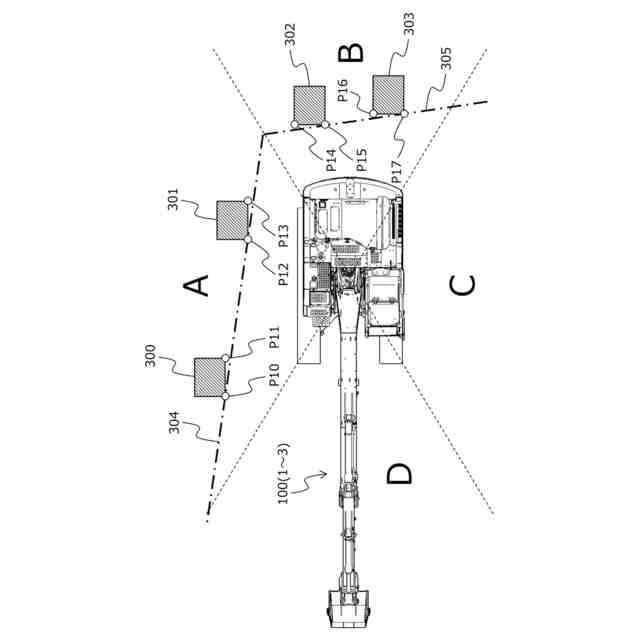
前記車体コントローラは、前記旋回平面を、前記車体の前後左右の4つの領域に分割し、前記4つの領域のそれぞれにおいて前記第1境界線を算出する
ことを特徴とする作業機械。
【請求項6】
請求項1に記載の作業機械において、
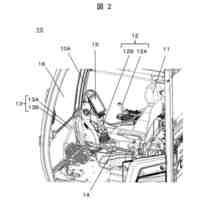
前記上部旋回体に設けられた運転室と、
前記運転室に配置されたモニタとを備え、
前記モニタは、前記車体と前記第1境界線との位置関係を表示する
ことを特徴とする作業機械。
【請求項7】
請求項6に記載の作業機械において、
前記車体コントローラに情報を入力するための入力装置を備え、
前記車体コントローラは、前記入力装置からの指示に応じて、前記第1境界線の位置調整、または、前記第1境界線の無効化を行う
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の作業機械に関わり、特に作業機械の侵入不可領域の設定方法に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
従来、油圧ショベルに代表される作業機械は、ブーム、アーム等複数の部位を同時に稼働することで複雑な動作を可能とする反面、オペレータの熟練度によって作業速度が変動しやすい特徴を持つ。近年、オペレータの熟練度に依らず、作業精度と作業速度を両立することを目的として、マシンコントロール制御(半自動掘削)や、領域制限制御(作業領域の逸脱抑制)と呼ばれる作業支援システムが提案されている。
【0003】
例えば特許文献1には、ブーム、アーム、バケット等の作業機の侵入不可領域をオペレータが教示(設定)し、作業機の姿勢を検出することで作業機と侵入不可領域との距離を測定し、作業機が侵入不可領域に侵入しないよう作業機を減速、停止させる技術が開示されている。また、特許文献1には、オペレータがバケットの刃先を侵入不可領域の境界線上に位置決めした状態で、侵入不可領域を設定する側(上、下、奥、手前)を選択する教示スイッチを押すことで侵入不可領域を教示する方法が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開平4―136324号
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のように侵入不可領域をオペレータが教示する方法の場合、施工現場の状況が変化したり車体が移動する度にオペレータが侵入不可領域を設定し直す必要があり、作業効率の低下につながる。
【0006】
本発明は、上記課題に鑑みてなされたものであり、その目的は、侵入不可領域の設定に関わるオペレータの作業負担を軽減することにより、作業効率を向上させることが可能な作業機械を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するために、本発明は、下部走行体と、前記下部走行体上に旋回可能に取り付けられた上部旋回体と、前記上部旋回体に上下方向に回動可能に取り付けられ、前記下部走行体および前記上部旋回体とともに車体を構成する作業装置と、前記車体の侵入不可領域を設定し、前記車体が前記侵入不可領域に侵入しないように前記車体の動作を制御する車体コントローラとを備えた作業機械において、前記車体の周囲の物体を点群データとして取得する物体検出装置を備え、前記車体コントローラは、前記上部旋回体の旋回中心軸と直交する平面である旋回平面に投影させた前記物体の前記点群データを基に第1境界線を算出し、前記第1境界線を通りかつ前記旋回中心軸に平行な平面を前記侵入不可領域の境界面となる第1境界面として設定するものとする。
【発明の効果】
【0008】
本発明によれば、作業機械の侵入不可領域の設定に関わるオペレータの作業負担が軽減されるため、作業効率を向上させることが可能となる。
【図面の簡単な説明】
【0009】
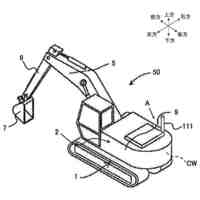
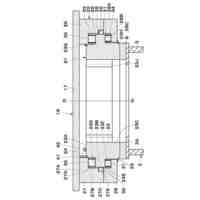
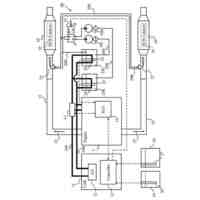
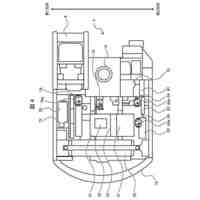
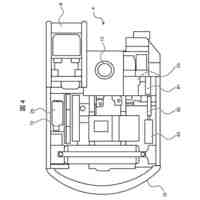
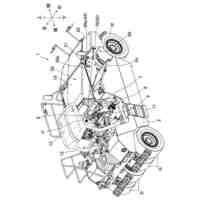
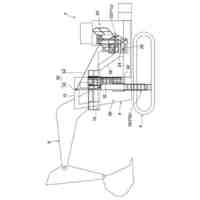
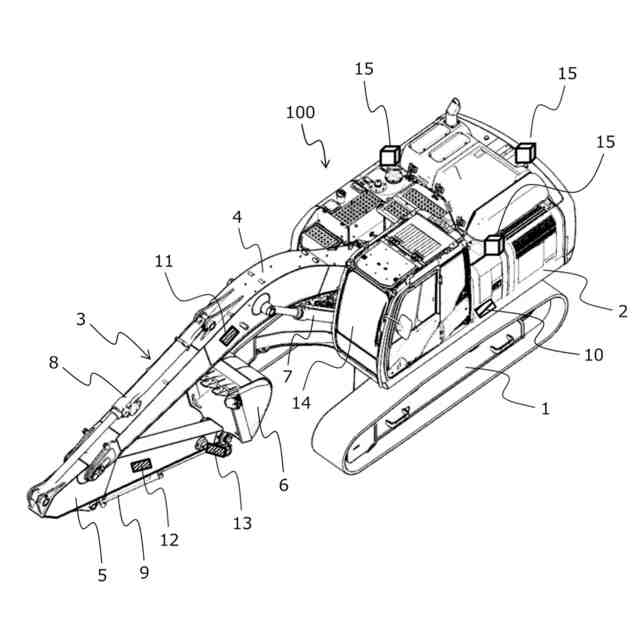
本発明の第1の実施例における油圧ショベルの外観図
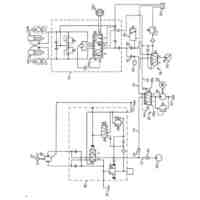
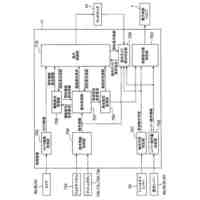
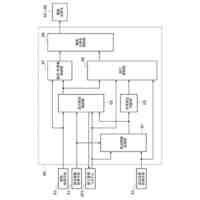
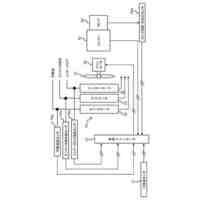
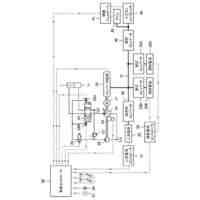
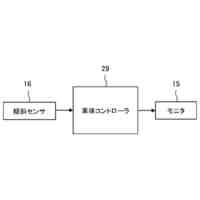
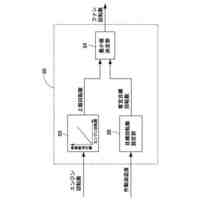
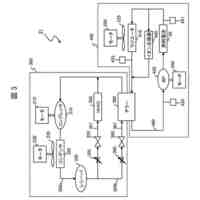
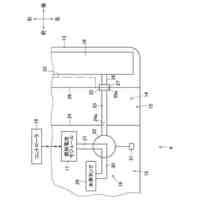
本発明の第1の実施例における車体コントローラの機能ブロック図
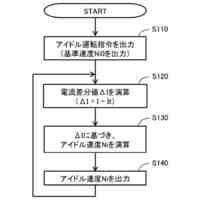
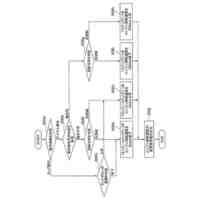
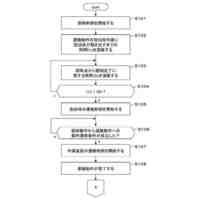
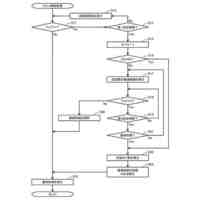
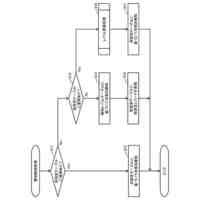
本発明の第1の実施例における境界線演算部および境界面演算部の処理を示すフローチャート
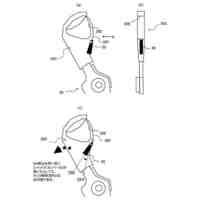
本発明の第1の実施例における、侵入不可領域の境界線および境界面の算出方法の一例を示す図
本発明の第1の実施例における、侵入不可領域の境界線および境界面の算出方法の一例を示す図
本発明の第1の実施例における、侵入不可領域の境界線の算出方法のその他の例を示す図
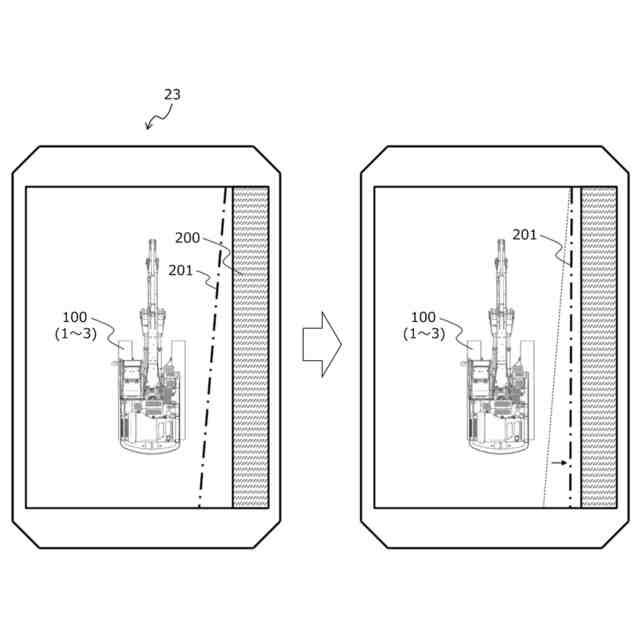
本発明の第1の実施例における、境界線の角度を調整する際のモニタの表示例を示す図
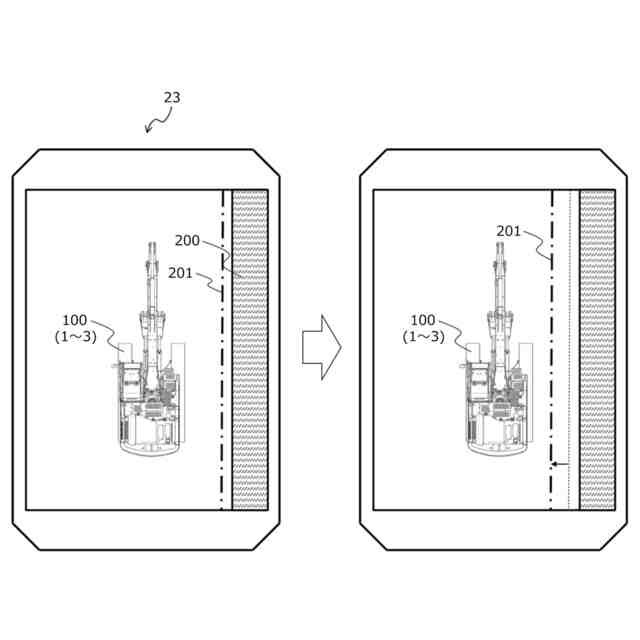
本発明の第1の実施例における、境界線のオフセットを調整する際のモニタの表示例を示す図
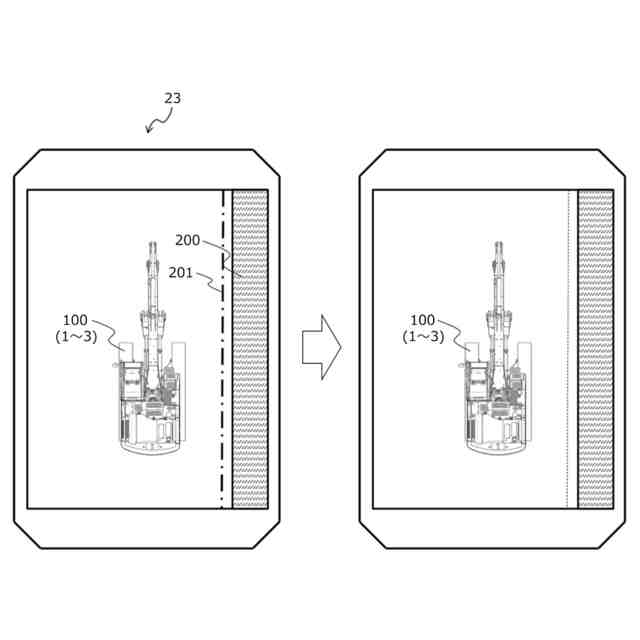
本発明の第1の実施例における、境界線を無効化する際のモニタの表示例を示す図
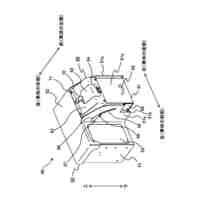
本発明の第1の実施例における、車体の左右方向および後方向で構造物が検出された場合のモニタの表示例を示す図
本発明の第1の実施例における、車体の左右方向で構造物が検出され、かつ車体の後方向で物体が検出されなかった場合のモニタの表示例を示す図
本発明の第2の実施例におけるモニタの表示例を示す図
本発明の第3の実施例における侵入不可領域の境界線の算出方法を示す図
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について、図面を参照して説明する。なお、各図中、同等の部材には同一の符号を付し、重複した説明は適宜省略する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
19日前
日立建機株式会社
建設機械
19日前
日立建機株式会社
作業機械
26日前
日立建機株式会社
建設機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
19日前
日立建機株式会社
建設機械
19日前
日立建機株式会社
建設機械
11日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
19日前
日立建機株式会社
運搬車両
19日前
日立建機株式会社
建設機械
19日前
日立建機株式会社
建設機械
25日前
日立建機株式会社
走行装置
20日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
25日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
転圧機械
26日前
日立建機株式会社
作業機械
24日前
日立建機株式会社
作業機械
26日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
転圧機械
26日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
建設機械
17日前
日立建機株式会社
油圧駆動装置
25日前
日立建機株式会社
角度検出装置
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ