TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024167741
公報種別
公開特許公報(A)
公開日
2024-12-04
出願番号
2023084017
出願日
2023-05-22
発明の名称
作業機械
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20241127BHJP(水工;基礎;土砂の移送)
要約
【課題】アタッチメントを使って移動させた物の重量をより正確に算出できる作業機械を提供すること。
【解決手段】作業機械100は、下部走行体1と、下部走行体1に旋回機構を介して搭載される上部旋回体3と、上部旋回体3に取り付けられるアタッチメントと、アタッチメントによって持ち上げられた物の重量を算出するコントローラ30と、を備えている。コントローラ30は、アタッチメントによって持ち上げられた物の一部がアタッチメントから落ちたことを検知するように構成されている。
【選択図】図1
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回機構を介して搭載される上部旋回体と、
前記上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントによって持ち上げられた物の重量を算出する制御装置と、を備え、
前記制御装置は、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを検知する、
作業機械。
続きを表示(約 710 文字)
【請求項2】
前記制御装置は、前記アタッチメントによって持ち上げられた物の重量を算出した後で、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを検知した場合に、前記アタッチメントによって持ち上げられた物の重量を算出し直す、
請求項1に記載の作業機械。
【請求項3】
前記制御装置は、空間認識装置及びシリンダ圧センサの少なくとも一つの出力に基づいて前記アタッチメントによって持ち上げられた物の重量を算出する、
請求項1又は請求項2に記載の作業機械。
【請求項4】
前記制御装置は、空間認識装置及びシリンダ圧センサの少なくとも一つの出力に基づき、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを検知する、
請求項1又は請求項2に記載の作業機械。
【請求項5】
前記制御装置は、前記アタッチメントから落ちた部分の重量を算出する、
請求項1又は2に記載の作業機械。
【請求項6】
前記制御装置は、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを検知した場合に、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを外部に知らせる、
請求項1又は2に記載の作業機械。
【請求項7】
前記制御装置は、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちて目的場所に達しなかったことを検知する、
請求項1又は2に記載の作業機械。
発明の詳細な説明
【技術分野】
【0001】
本開示は、作業機械に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、アタッチメントの一回の動作によって持ち上げられる物の重量に基づき、ダンプトラックの荷台に積み込まれた物の重量(積載重量)を算出するショベルが知られている(特許文献1参照。)。
【先行技術文献】
【特許文献】
【0003】
国際公開第2019/031551号
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、このショベルでは、アタッチメントによって持ち上げられたもののその後にアタッチメントから落ちてしまいダンプトラックの荷台に入らなかった物の重量までもが積載重量に含まれてしまうおそれがある。そのため、積載重量を正確に算出することができないおそれがある。
【0005】
そこで、アタッチメントを使って移動させた物の重量をより正確に算出できる作業機械を提供することが望まれる。
【課題を解決するための手段】
【0006】
本発明の実施形態に係る作業機械は、下部走行体と、前記下部走行体に旋回機構を介して搭載される上部旋回体と、前記上部旋回体に取り付けられるアタッチメントと、前記アタッチメントによって持ち上げられた物の重量を算出する制御装置と、を備え、前記制御装置は、前記アタッチメントによって持ち上げられた物の一部が前記アタッチメントから落ちたことを検知する。
【発明の効果】
【0007】
上述の作業機械は、アタッチメントを使って移動させた物の重量をより正確に算出できる。
【図面の簡単な説明】
【0008】
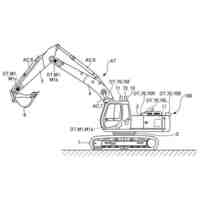
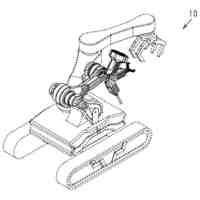
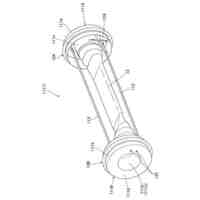
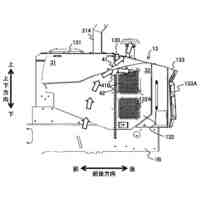
本実施形態に係る作業機械の側面図である。
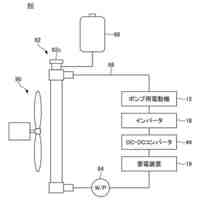
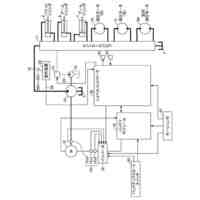
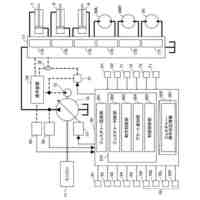
図1に示す作業機械に搭載される駆動系の構成例を示すブロック図である。
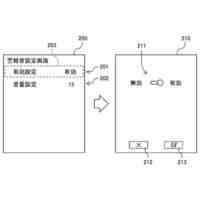
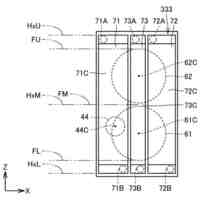
メイン画面の構成例を示す図である。
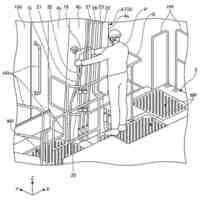
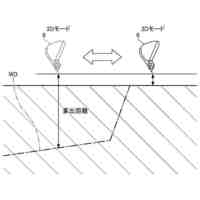
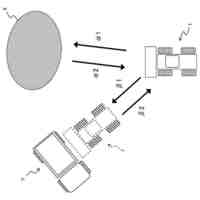
作業現場の様子を示す図である。
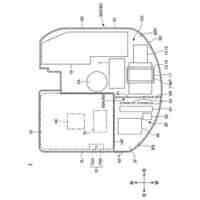
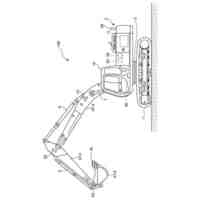
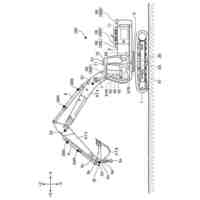
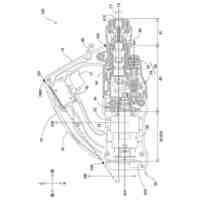
図1に示す作業機械の側面図である。
【発明を実施するための形態】
【0009】
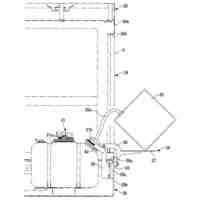
以下、図面を参照して発明を実施するための形態について説明する。図1は、本発明の実施形態に係る作業機械100の側面図である。作業機械100の下部走行体1には旋回機構2を介して上部旋回体3が搭載されている。上部旋回体3にはブーム4が取り付けられている。ブーム4の先端にはアーム5が取り付けられ、アーム5の先端にはエンドアタッチメント(作業具)としてのリフティングマグネット6が取り付けられている。ブーム4、アーム5、及びリフティングマグネット6はアタッチメントの一例である作業アタッチメントを構成している。そして、ブーム4はブームシリンダ7で昇降駆動され、アーム5はアームシリンダ8で開閉駆動され、リフティングマグネット6はリフティングマグネットシリンダ9で開閉駆動される。なお、エンドアタッチメント(作業具)は、グラップル、バケット、フォーク、又はレーキ等、リフティングマグネット6以外の他の作業具であってもよい。
【0010】
ブーム4にはブーム角度センサS1が取り付けられ、アーム5にはアーム角度センサS2が取り付けられ、リフティングマグネット6にはリフティングマグネット角度センサS3が取り付けられている。上部旋回体3には、コントローラ30、表示装置40、空間認識装置80、機体傾斜センサS4、及び旋回角速度センサS5が取り付けられている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
耐震原子炉設備
14日前
FKS株式会社
擁壁
19日前
株式会社forch
土採取装置
20日前
鹿島建設株式会社
基礎構造
13日前
株式会社クボタ
作業車
5日前
株式会社竹中工務店
建築方法
11日前
株式会社富田製作所
継手部構造
13日前
住友建機株式会社
ショベル
18日前
住友建機株式会社
ショベル
18日前
住友建機株式会社
ショベル
18日前
住友建機株式会社
作業機械
4日前
住友建機株式会社
ショベル
12日前
住友建機株式会社
作業機械
6日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
4日前
住友建機株式会社
ショベル
5日前
住友建機株式会社
ショベル
5日前
株式会社クボタ
作業機
13日前
日立建機株式会社
建設機械
13日前
株式会社クボタ
作業車両
11日前
株式会社テノックス九州
地盤改良方法
25日前
日本車輌製造株式会社
建設機械
4日前
住友重機械工業株式会社
ショベル
19日前
住友重機械工業株式会社
ショベル
7日前
住友重機械工業株式会社
ショベル
5日前
エバタ株式会社
下水道施設の再構築方法
18日前
大仲建設株式会社
スコップ
11日前
ナブテスコ株式会社
ショベルカー
25日前
大成建設株式会社
杭基礎構造
19日前
戸田建設株式会社
杭頭空間形成装置
7日前
ヤンマーホールディングス株式会社
作業機械
12日前
株式会社マキタ
打撃工具
5日前
住友重機械工業株式会社
作業機械の制御装置
11日前
株式会社小松製作所
作業機械
5日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
作業車両
18日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ