TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025104058
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023221887
出願日
2023-12-27
発明の名称
ショベル
出願人
住友重機械工業株式会社
代理人
個人
,
個人
主分類
E02F
9/22 20060101AFI20250702BHJP(水工;基礎;土砂の移送)
要約
【課題】より効率的な掘削を実現できるショベルを提供すること。
【解決手段】ショベル100は、下部走行体1と、下部走行体1に旋回可能に搭載される上部旋回体3と、上部旋回体3に取り付けられるアタッチメントATと、アタッチメントATの状態を検出する状態検出装置DTと、アタッチメントATを動作させるアクチュエータACと、アクチュエータACの動きを制御するコントローラ30とを備える。そして、コントローラ30は、状態検出装置DTの出力に基づいて導き出されるアタッチメントATの状態を表す物理量が所定の閾値に達した場合に、掘削対象が硬いときと掘削対象が重いときとでアクチュエータACの動きが異なるようにアクチュエータACの動きを制御する。
【選択図】図1
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体に旋回可能に搭載される上部旋回体と、
前記上部旋回体に取り付けられるアタッチメントと、
前記アタッチメントの状態を検出する状態検出装置と、
前記アタッチメントを動作させるアクチュエータと、
前記アクチュエータの動きを制御する制御装置と、を備え、
前記制御装置は、前記状態検出装置の出力に基づいて導き出される前記アタッチメントの状態を表す物理量が所定の閾値に達した場合に、掘削対象が硬いときと掘削対象が重いときとで前記アクチュエータの動きが異なるように前記アクチュエータの動きを制御する、
ことを特徴とするショベル。
続きを表示(約 630 文字)
【請求項2】
前記アタッチメントは、ブーム、アーム、及びバケットを含み、
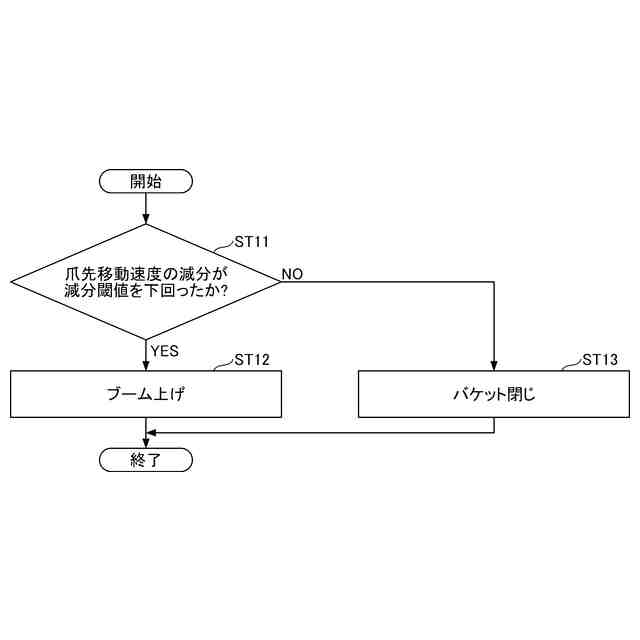
前記制御装置は、掘削対象が硬いときに前記バケットを閉じ、掘削対象が重いときに前記ブームを上げる、
請求項1に記載のショベル。
【請求項3】
前記制御装置は、前記状態検出装置の出力に基づいて導き出される前記アタッチメントの状態を表す物理量が所定の閾値に達した時点に先行する期間を含む所定の監視期間における前記アタッチメントの状態の推移に基づいて掘削対象が硬いか重いかを判定する、
請求項1に記載のショベル。
【請求項4】
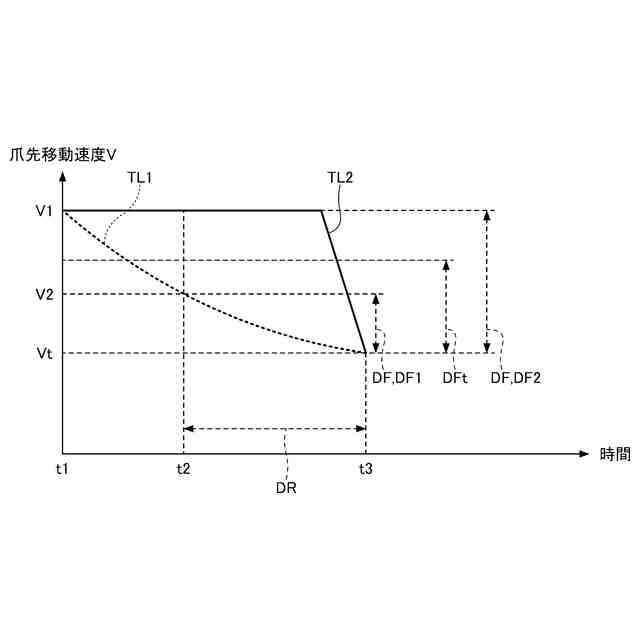
前記状態検出装置は、前記アタッチメントの状態を表す物理量として、バケットの爪先の移動速度又は掘削反力を検出し、
前記制御装置は、前記移動速度が第1閾値を下回った場合、又は、前記掘削反力が第2閾値を上回った場合に、掘削対象が硬いか重いかを判定する、
請求項3に記載のショベル。
【請求項5】
前記制御装置は、
前記監視期間における前記移動速度の減分が減分閾値を超えた場合、又は、前記監視期間における前記掘削反力の増分が増分閾値を超えた場合に掘削対象が硬いと判定し、
前記監視期間における前記移動速度の減分が減分閾値以下の場合、又は、前記監視期間における前記掘削反力の増分が増分閾値以下の場合に掘削対象が重いと判定する、
請求項4に記載のショベル。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ショベルに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、掘削反力が所定値を上回ったときに掘削反力が小さくなるようにブームを上昇させるショベルが知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2011-252338号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述のショベルは、土砂の硬さ又は重さといった掘削対象の状態とは無関係に、掘削反力が所定値を上回りさえすればブームを上昇させる。そのため、掘削対象の状態によっては効率的な掘削を実現できないおそれがある。
【0005】
上述に鑑み、より効率的な掘削を実現できるショベルを提供することが望まれる。
【課題を解決するための手段】
【0006】
本開示の実施形態に係るショベルは、下部走行体と、前記下部走行体に旋回可能に搭載される上部旋回体と、前記上部旋回体に取り付けられるアタッチメントと、前記アタッチメントの状態を検出する状態検出装置と、前記アタッチメントを動作させるアクチュエータと、前記アクチュエータの動きを制御する制御装置と、を備え、前記制御装置は、前記状態検出装置の出力に基づいて導き出される前記アタッチメントの状態を表す物理量が所定の閾値に達した場合に、掘削対象が硬いときと掘削対象が重いときとで前記アクチュエータの動きが異なるように前記アクチュエータの動きを制御する。
【発明の効果】
【0007】
上述のショベルは、より効率的な掘削を実現できる。
【図面の簡単な説明】
【0008】
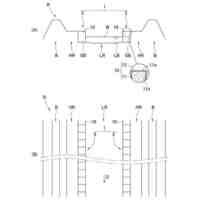
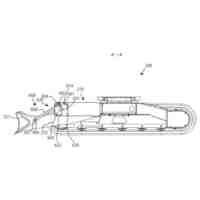
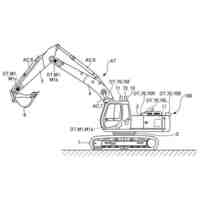
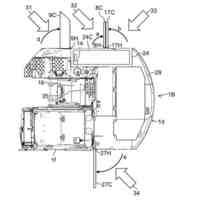
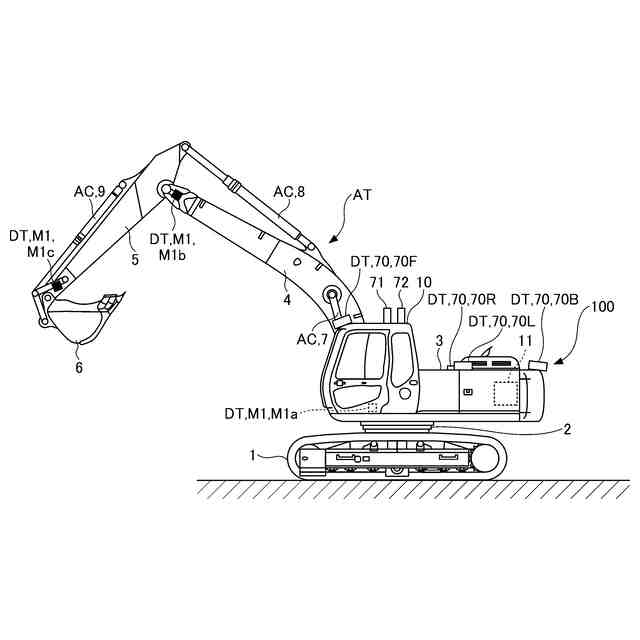
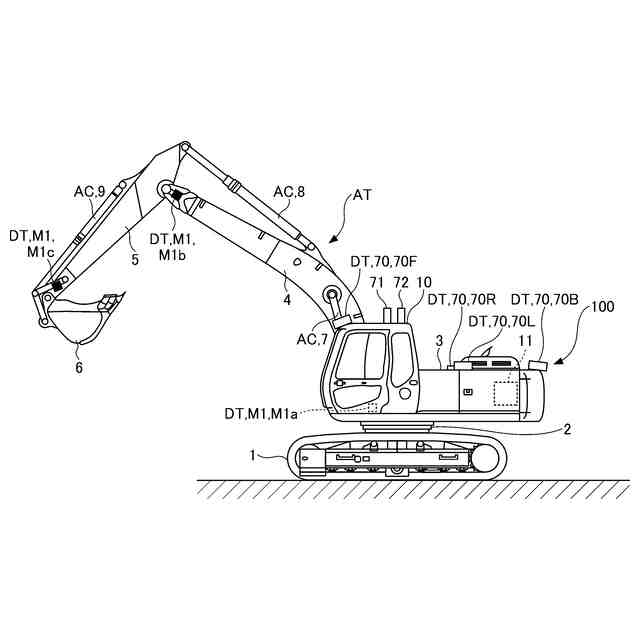
本開示の実施形態に係るショベルの側面図である。
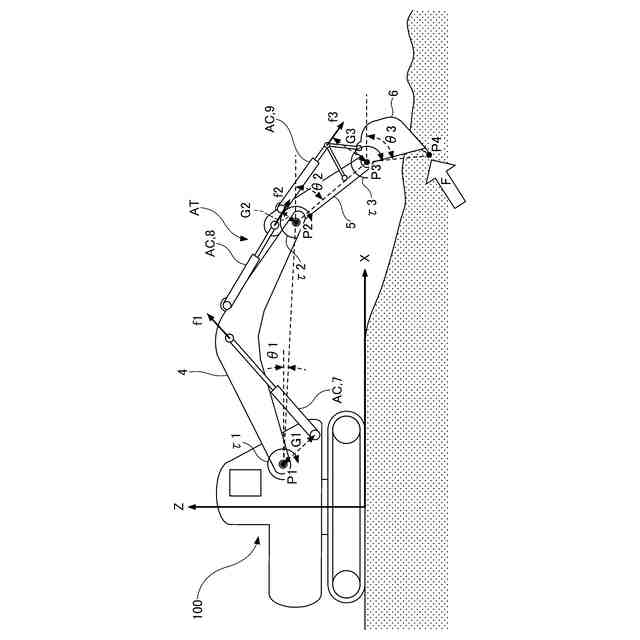
図1のショベルのアタッチメントと各種物理量との間の関係を示すショベルの側面図である。
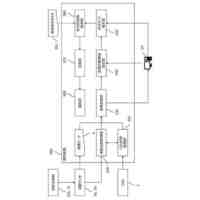
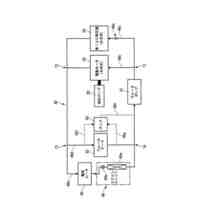
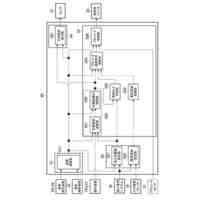
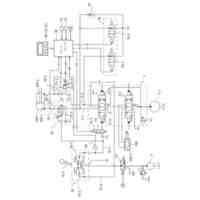
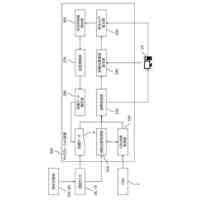
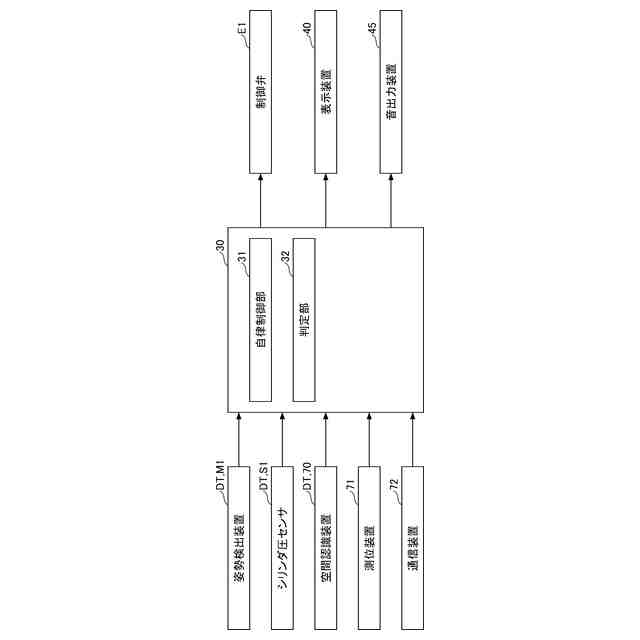
図1のショベルに搭載される基本システムの構成例を示す図である。
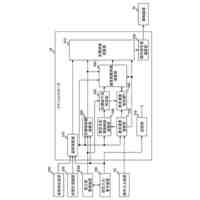
図1のショベルに搭載される掘削制御システムの構成例を示す図である。
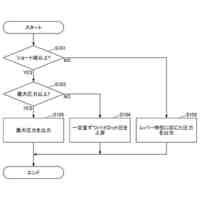
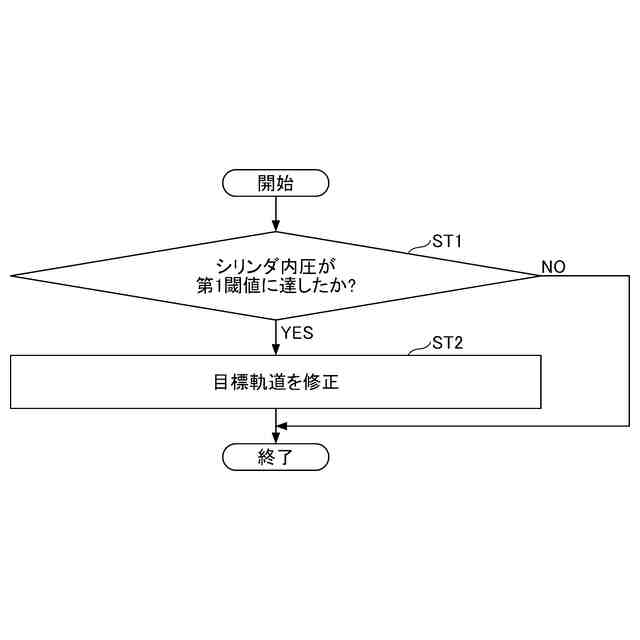
目標軌道修正処理の流れの一例を示すフローチャートである。
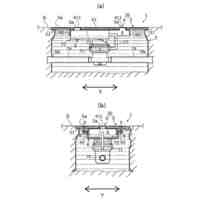
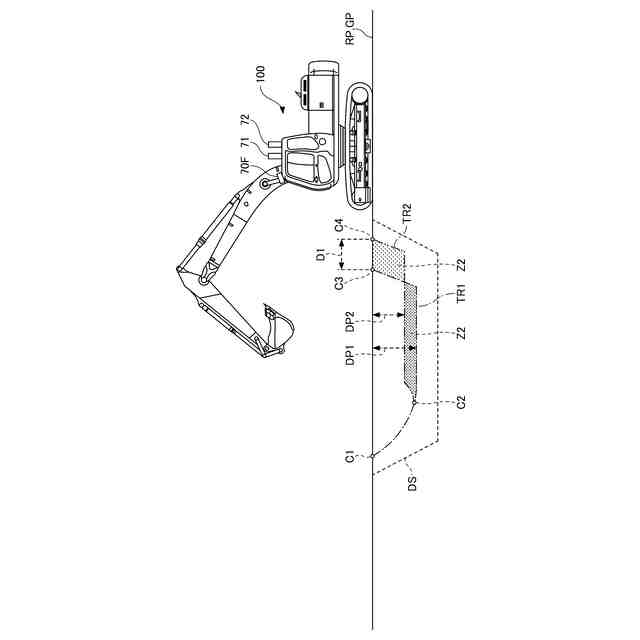
目標軌道修正処理が行われるときの作業現場の一例を示す図である。
アタッチメント駆動処理の流れの一例を示すフローチャートである。
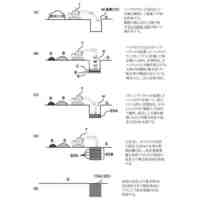
爪先移動速度の時間的推移の例を示すグラフである。
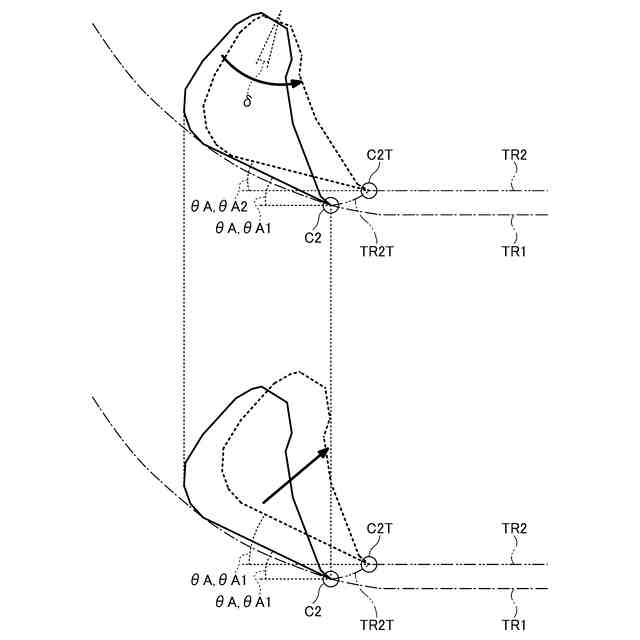
爪先点が目標軌道上に位置するときのバケットの左側面図である。
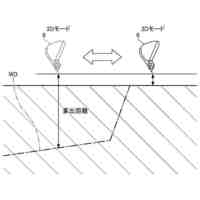
目標軌道修正処理が行われるときの作業現場の別の例を示す図である。
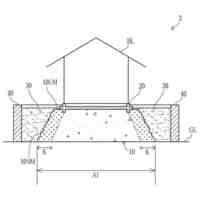
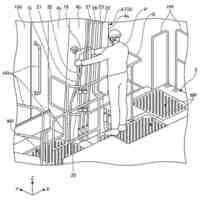
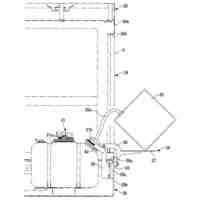
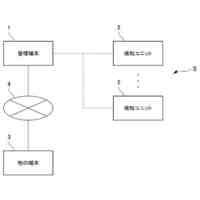
施工システムの一例を示す概略図である。
【発明を実施するための形態】
【0009】
最初に、図1を参照し、本開示の実施形態に係る建設機械としての掘削機(ショベル100)について説明する。図1は、本開示の実施形態に係るショベル100の側面図である。図1に示すショベル100の下部走行体1には旋回機構2を介して上部旋回体3が旋回可能に搭載されている。そして、上部旋回体3にはブーム4が取り付けられ、ブーム4の先端にはアーム5が取り付けられ、アーム5の先端にはバケット6が取り付けられている。なお、本書では、便宜上、上部旋回体3における、ブーム4が取り付けられている側を前方とし、カウンタウェイトが取り付けられている側を後方とする。作業要素としてのブーム4、アーム5、及びバケット6はアタッチメントATを構成する。アタッチメントATは掘削アタッチメントとも呼ばれる。ブーム4はブームシリンダ7により駆動され、アーム5はアームシリンダ8により駆動され、バケット6はバケットシリンダ9により駆動される。ブームシリンダ7、アームシリンダ8、及びバケットシリンダ9は、アクチュエータACの一例である。
【0010】
アタッチメントATには姿勢検出装置M1が取り付けられている。姿勢検出装置M1は、アタッチメントATの状態を検出する状態検出装置DTの一例である。状態検出装置DTは、状態センサとも呼ばれる。具体的には、姿勢検出装置M1は、アタッチメントATの姿勢を検出できるように構成されている。図示例では、姿勢検出装置M1は、ブーム角度センサM1a、アーム角度センサM1b、及びバケット角度センサM1cを含む。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
住友重機械工業株式会社
超伝導コイル
13日前
住友重機械工業株式会社
荷揚げ機械、荷揚げ方法、記憶媒体
今日
住友重機械工業株式会社
キャリブレーション装置、キャリブレーション方法、記憶媒体
今日
個人
大都市防災設備
12日前
個人
簡易免震構造
1か月前
日立建機株式会社
作業機械
18日前
大成建設株式会社
新設構造物
17日前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
ショベル
1か月前
住友建機株式会社
作業機械
1か月前
個人
水底地盤の天地返し工法と専用作業船
14日前
株式会社本久
改良地盤構築方法
25日前
株式会社大林組
基礎構造
14日前
株式会社久保製作所
河川構造物
1か月前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日本車輌製造株式会社
建設機械
1か月前
株式会社クボタ
作業車両
1か月前
株式会社クボタ
作業機
24日前
ヤンマーホールディングス株式会社
作業機械
17日前
日立建機株式会社
建設機械
19日前
ヤンマーホールディングス株式会社
作業機械
7日前
株式会社地盤改良堀田
基礎杭の設置方法
11日前
住友金属鉱山株式会社
タンク設置用基礎
7日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
10日前
住友重機械工業株式会社
ショベル
1か月前
株式会社山幸総建
シートパイルの土砂除去具
12日前
前田工繊株式会社
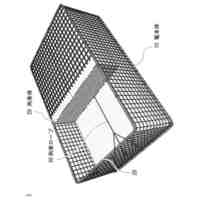
繊維製布団篭
28日前
株式会社フジタ
建築物とその施工方法
24日前
株式会社大林組
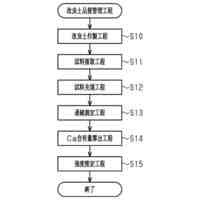
改良土の品質管理方法
19日前
日立建機株式会社
電動式建設機械
1か月前
日本精機株式会社
施工管理システム及び施工管理方法
28日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
株式会社日立建機ティエラ
建設機械
11日前
アクアインテック株式会社
メーターボックスの蓋
17日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ