TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025103243
公報種別
公開特許公報(A)
公開日
2025-07-09
出願番号
2023220502
出願日
2023-12-27
発明の名称
作業支援システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250702BHJP(水工;基礎;土砂の移送)
要約
【課題】最終的な目標施工地形を越えてしまうような作業が行われてしまうことを抑制することができる。
【解決手段】作業支援システム1は、作業機械10の機械本体10aと、アタッチメント15と、アタッチメント操作レバー35aと、コントローラ50と、を備える。アタッチメント15は、機械本体10aに対して作動可能に取り付けられ、作業を行うものである。アタッチメント操作レバー35aは、アタッチメント15を操作するためのものである。コントローラ50は、アタッチメント操作レバー35aに対するレバー操作量に応じて、オフセット量Oを決定する。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械の機械本体と、
前記機械本体に対して作動可能に取り付けられ、作業を行うアタッチメントと、
前記アタッチメントを操作するための操作レバーと、
コントローラと、
を備え、
前記コントローラは、
前記操作レバーに対するレバー操作量に応じて、仕上がりの目標となる目標施工地形から前記作業機械の作業の目標となる作業目標地形までの距離であるオフセット量を決定する、
作業支援システム。
続きを表示(約 900 文字)
【請求項2】
請求項1に記載の作業支援システムであって、
前記アタッチメントの実速度を検出するアタッチメント実速度検出部をさらに備え、
前記コントローラは、前記レバー操作量および前記実速度に基づいて前記オフセット量を決定する、
作業支援システム。
【請求項3】
請求項1に記載の作業支援システムであって、
前記アタッチメントは、先端アタッチメントを有しており、
前記目標施工地形から前記先端アタッチメントまでの距離を検出する距離検出部をさらに備え、
前記コントローラは、前記レバー操作量および前記距離に基づいて前記オフセット量を決定する、
作業支援システム。
【請求項4】
請求項1に記載の作業支援システムであって、
前記コントローラは、前記レバー操作量が予め定められた閾値以上である場合に、前記オフセット量を予め定められた固定値に決定する、
作業支援システム。
【請求項5】
請求項1に記載の作業支援システムであって、
前記コントローラは、前記レバー操作量が予め定められた閾値未満である場合に、前記オフセット量をゼロに決定する、
作業支援システム。
【請求項6】
請求項1に記載の作業支援システムであって、
前記コントローラは、前記操作レバーがデフォルト位置に戻った場合に、前記オフセット量をリセットする、
作業支援システム。
【請求項7】
請求項1に記載の作業支援システムであって、
前記コントローラは、前記レバー操作量を積算した値に基づいて前記オフセット量を決定する、
作業支援システム。
【請求項8】
請求項7に記載の作業支援システムであって、
前記コントローラは、
前記作業が、前記目標施工地形への整地作業であるか否かを判定し、
1サイクルの前記整地作業が終了したと判定した場合には、前記オフセット量をリセットする、
作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
例えば、特許文献1には、作業の目標とする地形を、アタッチメントの姿勢に基づいて切り替える作業機械の制御装置が記載されている。制御装置は、作業の目標とする地形を、仕上がりの目標である目標施工地形と、目標施工地形から予め定められた距離だけ離れたオフセット地形と、で切り替える。
【先行技術文献】
【特許文献】
【0003】
特開2016-523354号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、アタッチメントの姿勢だけでは、仕上げ作業であるのか否か判断できない可能性がある。仕上がりの目標である最終的な目標施工地形を越えてしまうような作業が行われてしまうことを抑制することが望まれる。
【0005】
そこで、本発明は、最終的な目標施工地形を越えてしまうような作業が行われてしまうことを抑制することが可能な、作業支援システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
作業支援システムは、作業機械の機械本体と、アタッチメントと、操作レバーと、コントローラと、を備える。アタッチメントは、前記機械本体に対して作動可能に取り付けられ、作業を行うものである。操作レバーは、前記アタッチメントを操作するためのものである。前記コントローラは、前記操作レバーに対するレバー操作量に応じて、オフセット量を決定する。オフセット量は、仕上がりの目標となる目標施工地形から前記作業機械の作業の目標となる作業目標地形までの距離である。
【発明の効果】
【0007】
上記の作業支援システムにより、最終的な目標施工地形を越えてしまうような作業が行われてしまうことを抑制することができる。
【図面の簡単な説明】
【0008】
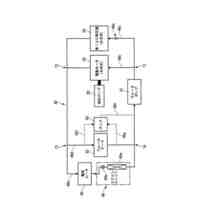
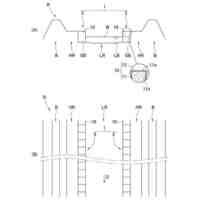
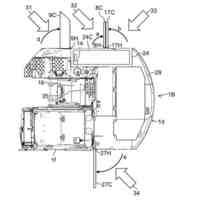
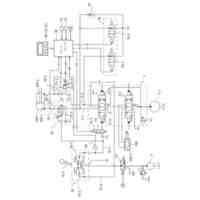
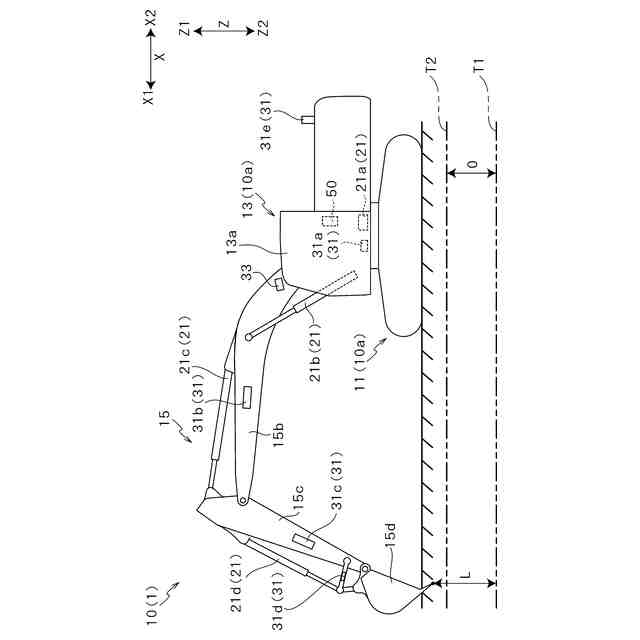
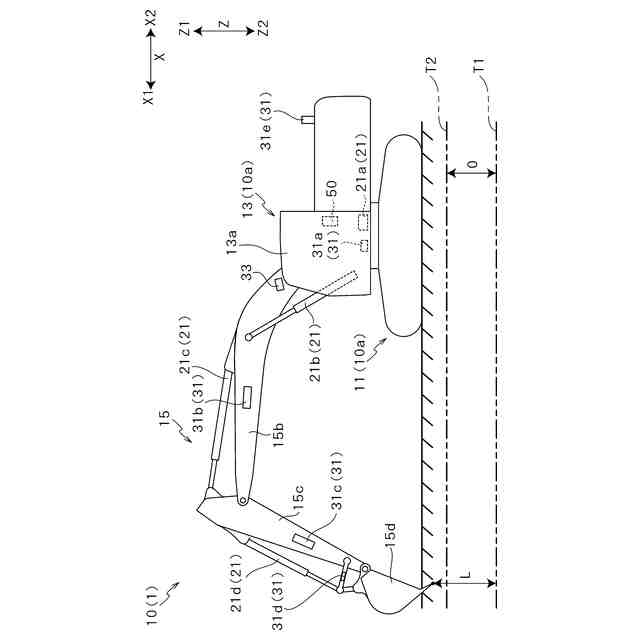
作業支援システム1の作業機械10などを横から見た図である。
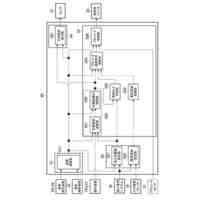
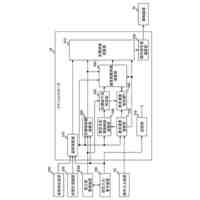
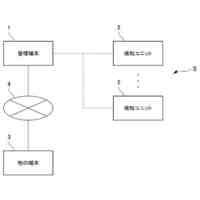
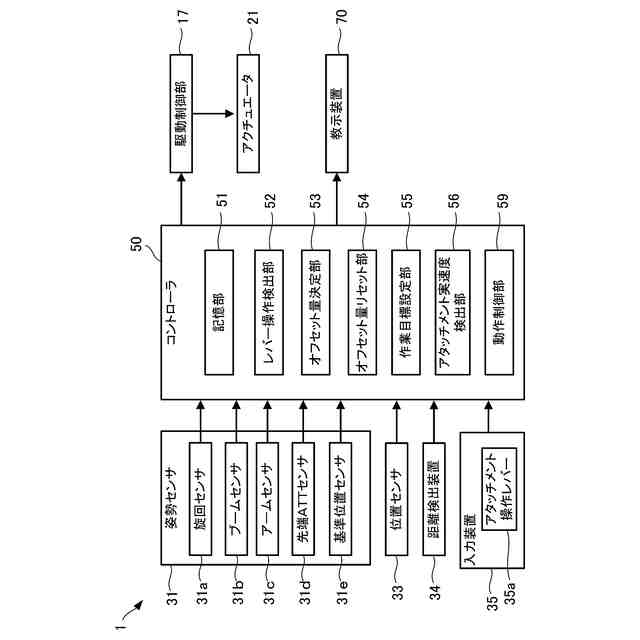
図1に示す作業支援システム1のブロック図である。
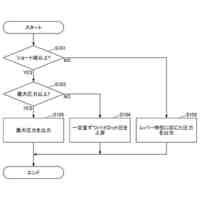
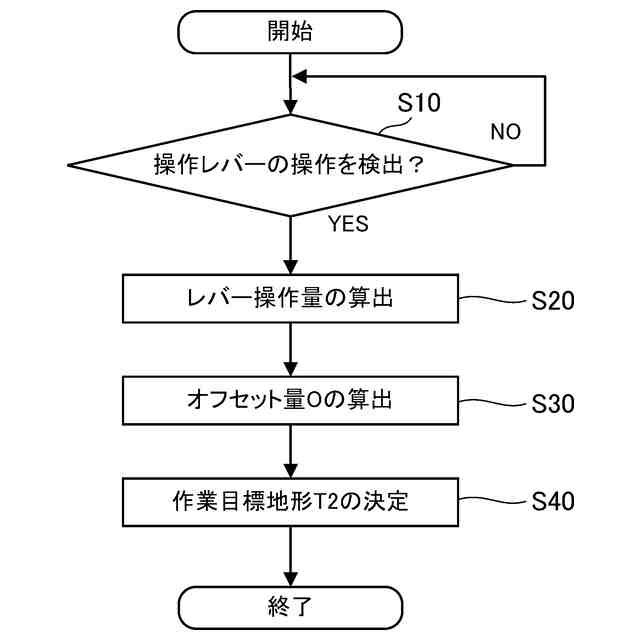
図2に示すコントローラ50による、レバー操作量に基づいてオフセット量Oを決定する作動のフローチャートである。
図2に示すコントローラ50による、レバー操作量およびアタッチメント15の実速度に基づいてオフセット量Oを決定する作動のフローチャートである。
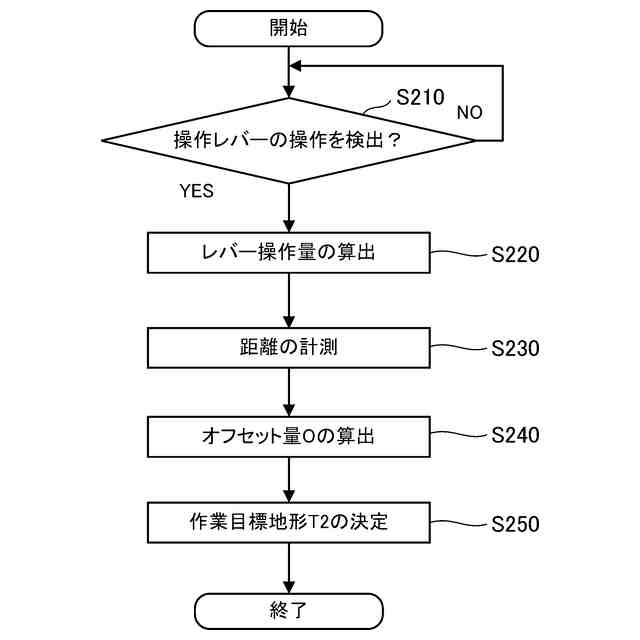
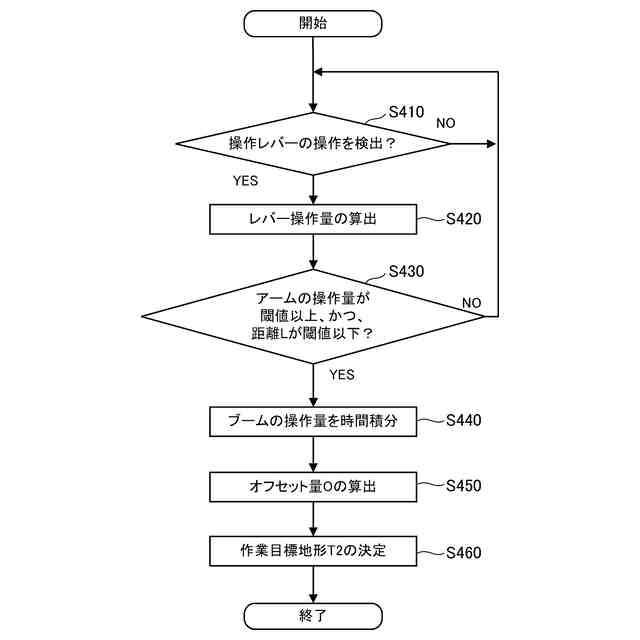
図2に示すコントローラ50による、レバー操作量および目標施工地形T1から先端アタッチメント15dまでの距離に基づいてオフセット量Oを決定する作動のフローチャートである。
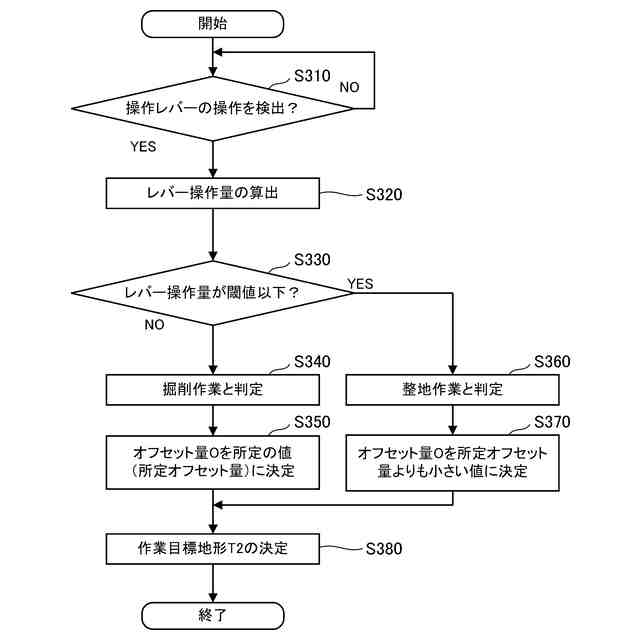
図2に示すコントローラ50による、レバー操作量を閾値で判定してオフセット量Oを決定する作動のフローチャートである。
図2に示すコントローラ50による、レバー操作量を時間積分してオフセット量Oを決定する作動のフローチャートである。
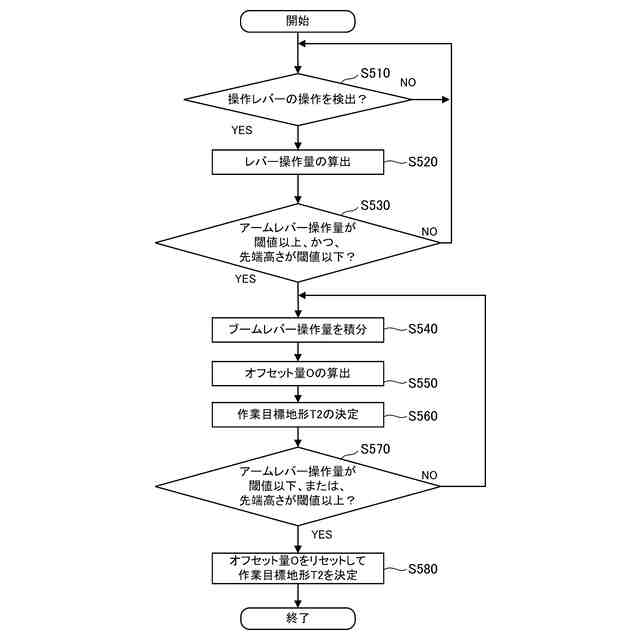
図2に示すコントローラ50による、レバー操作量を時間積分してオフセット量Oを決定するとともに、オフセット量Oをリセットする作動のフローチャートである。
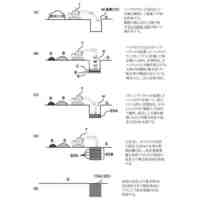
図8に示すフローチャートにおける、レバー操作量およびオフセット量O等の関係を示す図である。
作業支援システム1のオフセット量Oおよび目標施工地形T1などの変形例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面を参照して、作業支援システム1について説明する。
【0010】
作業支援システム1は、作業機械10による作業の目標とする地形(作業目標地形T2)を設定するシステムである。作業支援システム1は、目標施工地形T1と作業目標地形T2とのオフセット量Oを決定する。作業支援システム1は、レバー操作量に応じて、オフセット量Oを決定する。図1に示すように、作業支援システム1は、作業機械10と、姿勢センサ31と、距離検出装置34(距離検出部)(図2参照)と、入力装置35(図2参照)と、コントローラ50(コンピュータ)と、教示装置70(図2参照)と、を備える。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
大都市防災設備
12日前
個人
簡易免震構造
1か月前
日立建機株式会社
作業機械
18日前
大成建設株式会社
新設構造物
17日前
住友建機株式会社
ショベル
1か月前
個人
水底地盤の天地返し工法と専用作業船
14日前
株式会社クボタ
作業機
24日前
日立建機株式会社
建設機械
19日前
ヤンマーホールディングス株式会社
作業機械
7日前
日本車輌製造株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
株式会社本久
改良地盤構築方法
25日前
株式会社久保製作所
河川構造物
1か月前
株式会社クボタ
作業車両
1か月前
株式会社大林組
基礎構造
14日前
ヤンマーホールディングス株式会社
作業機械
17日前
住友金属鉱山株式会社
タンク設置用基礎
7日前
株式会社地盤改良堀田
基礎杭の設置方法
11日前
有限会社冨永総業
キャンプ用ペグ抜きハンマー
10日前
株式会社山幸総建
シートパイルの土砂除去具
12日前
株式会社大林組
改良土の品質管理方法
19日前
株式会社フジタ
建築物とその施工方法
24日前
日立建機株式会社
電動式建設機械
1か月前
前田工繊株式会社
繊維製布団篭
28日前
日本精機株式会社
施工管理システム及び施工管理方法
28日前
ナブテスコ株式会社
建設機械の関節機構
1か月前
株式会社日立建機ティエラ
建設機械
11日前
日本車輌製造株式会社
建設機械の組立方法
7日前
アロン化成株式会社
排水管通気設備
12日前
アクアインテック株式会社
メーターボックスの蓋
17日前
個人
日本列島都市防災設備又は日本列島大都市防災設備
6日前
株式会社丸和
連結金具セット、及び連結方法
1か月前
株式会社小松製作所
作業機械
1か月前
株式会社 CUP商会
仮補強リングの使用方法
26日前
株式会社竹中工務店
基礎梁
1か月前
西松建設株式会社
護岸ブロック及び護岸構造物
25日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ