TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024174049
公報種別
公開特許公報(A)
公開日
2024-12-13
出願番号
2024166836,2021034911
出願日
2024-09-26,2021-03-05
発明の名称
建設機械の動作制御システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/20 20060101AFI20241206BHJP(水工;基礎;土砂の移送)
要約
【課題】操作対象の建設機械をより確実に指定することができるとともに、正しい操作対象への指令が発行されたか否かをより容易かつより短い時間で確認することができる建設機械の動作制御システムを提供すること。
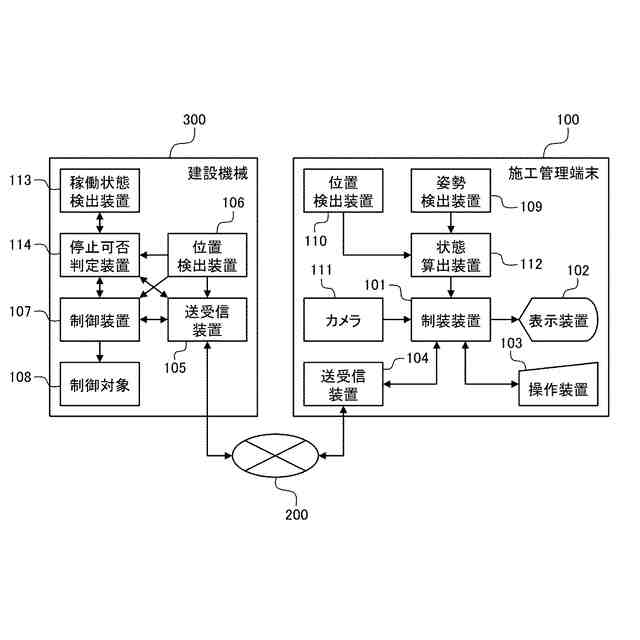
【解決手段】操作者によって操作装置で指定された周囲映像内の所定位置と端末姿勢検出装置により検出された施工管理端末の向きと端末位置検出装置により検出された施工管理端末の位置とに基づいて、施工現場での所定位置に対応する指定領域の位置を算出し、指定領域の位置と機械位置検出装置により検出された建設機械の位置情報とに基づいて、指定領域内に建設機械が存在するかを判定し、指定領域内に建設機械が存在すると判定された場合、制御情報として建設機械を停止させる停止制御情報を作成すると共に、停止制御情報を機械制御装置へ出力する。
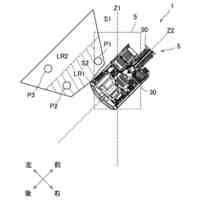
【選択図】 図1
特許請求の範囲
【請求項1】
建設機械を操作するための制御情報を作成する施工管理端末と、前記制御情報に基づいて前記建設機械の動作を制御する機械制御装置と、を備えた建設機械の動作制御システムにおいて、
前記施工管理端末の向きを検出する端末姿勢検出装置と、
前記施工管理端末の位置を検出する端末位置検出装置と、
前記建設機械の位置情報を検出する機械位置検出装置と、をさらに備え、
前記施工管理端末は、施工現場を撮影するカメラと、前記カメラが撮影した前記施工現場を周囲映像として表示する表示装置と、前記表示装置に表示された前記周囲映像内の所定位置を操作者が指定するための操作装置と、前記制御情報を作成する端末制御装置と、を有し、
前記端末制御装置は、
操作者によって前記操作装置で指定された前記周囲映像内の前記所定位置と前記端末姿勢検出装置により検出された前記施工管理端末の向きと前記端末位置検出装置により検出された前記施工管理端末の位置とに基づいて、前記施工現場での前記所定位置に対応する指定領域の位置を算出し、
前記指定領域の位置と前記機械位置検出装置により検出された前記建設機械の位置情報とに基づいて、前記指定領域内に前記建設機械が存在するかを判定し、
前記指定領域内に前記建設機械が存在すると判定された場合、前記制御情報として前記建設機械を停止させる停止制御情報を作成すると共に、前記停止制御情報を前記機械制御装置へ出力することを特徴とする建設機械の動作制御システム。
続きを表示(約 2,100 文字)
【請求項2】
請求項1記載の建設機械の動作制御システムにおいて、
前記建設機械の姿勢、および前記建設機械を操作するための前記制御情報からなる機械稼働情報を検出する機械稼働状態検出装置と、
をさらに備え、
前記機械制御装置と、前記機械位置検出装置と、前記機械稼働状態検出装置と、は前記建設機械に取り付けられており、
前記端末制御装置は、
前記機械稼働状態検出装置により検出された前記機械稼働情報から、前記建設機械の外郭形状を算出し、
前記指定領域の位置、前記建設機械の位置情報、および前記外郭形状に基づき、前記外郭形状が前記指定領域内に存在するかを判定し、
前記外郭形状が前記指定領域内に存在する場合、前記指定領域内に前記建設機械が存在すると判定することを特徴とする建設機械の動作制御システム。
【請求項3】
請求項1記載の建設機械の動作制御システムにおいて、
前記建設機械の姿勢、および前記建設機械を操作するための前記制御情報からなる機械稼働情報を検出する機械稼働状態検出装置と、
前記機械稼働状態検出装置により検出された前記機械稼働情報に基づいて前記建設機械を安定して停止可能かどうかを判定する停止可否判定装置と、
をさらに備え、
前記機械制御装置と、前記機械位置検出装置と、前記機械稼働状態検出装置と、前記停止可否判定装置と、は前記建設機械に取り付けられており、
前記停止可否判定装置は、
前記機械制御装置が前記停止制御情報を受信した場合、前記建設機械を安定して停止可能かどうかを判定し、
前記建設機械を安定して停止可能であると判定した場合は前記機械制御装置に前記建設機械を停止させ、
前記建設機械を安定して停止不可であると判定した場合は停止不可な状態であることを示す停止不可情報を前記施工管理端末に送信することを特徴とする建設機械の動作制御システム。
【請求項4】
請求項1記載の建設機械の動作制御システムにおいて、
前記端末制御装置は、
前記指定領域内に前記建設機械が複数存在すると判定される場合、前記端末位置検出装置にて検出された前記施工管理端末の位置と、前記機械位置検出装置にて検出された複数の前記建設機械の位置情報に基づき、複数の前記建設機械のうち、前記施工管理端末に最も近い位置に存在する前記建設機械を停止させる停止制御情報を出力することを特徴とする建設機械の動作制御システム。
【請求項5】
請求項1記載の建設機械の動作制御システムにおいて、
前記端末制御装置は、
前記指定領域内に前記建設機械が複数存在すると判定される場合、前記指定領域内に存在すると判定された全ての前記建設機械を停止させる停止制御情報を出力することを特徴とする建設機械の動作制御システム。
【請求項6】
請求項1記載の建設機械の動作制御システムにおいて、
前記端末制御装置は、
前記指定領域内に前記建設機械が複数存在すると判定される場合、前記指定領域内に存在すると判定された全ての前記建設機械の情報を前記表示装置に出力し、前記建設機械の情報を一覧表示させ、
複数の前記建設機械のうち前記操作者が前記操作装置によって前記一覧表示から選択した前記建設機械を停止させる停止制御情報を出力することを特徴とする建設機械の動作制御システム。
【請求項7】
建設機械を操作するための制御情報を作成する制御装置と、前記制御情報に基づいて前記建設機械の動作を制御する機械制御装置と、を備えた建設機械の動作制御システムにおいて、
施工現場を撮影するカメラと、
前記カメラの向きを検出するカメラ姿勢検出装置と、
前記カメラの位置を検出するカメラ位置検出装置と、
前記建設機械の位置情報を検出する機械位置検出装置と、
前記カメラが撮影した前記施工現場を周囲映像として表示する表示装置と、
前記表示装置に表示された前記周囲映像内の所定位置を操作者が指定するための操作装置と、をさらに備え、
前記制御装置は、
操作者によって前記操作装置で指定された前記周囲映像内の前記所定位置と前記カメラ姿勢検出装置により検出された前記カメラの向きと前記カメラ位置検出装置により検出された前記カメラの位置とに基づいて、前記施工現場での前記所定位置に対応する指定領域の位置を算出し、
前記指定領域の位置と前記機械位置検出装置により検出された前記建設機械の位置情報とに基づいて、前記指定領域内に前記建設機械が存在するかを判定し、
前記指定領域内に前記建設機械が存在すると判定された場合、前記制御情報として前記建設機械を停止させる停止制御情報を作成すると共に、前記停止制御情報を前記機械制御装置へ出力することを特徴とする建設機械の動作制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、油圧ショベル等の建設機械に適用される建設機械の動作制御システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
施工現場において異なる作業を行う複数の建設機械を自動運転で動作させる技術として、例えば、特許文献1には、異なる作業を行う複数の建設機械が自動運転機能を有し、施工管理部により前記複数の建設機械を管理する建設機械の施工方法であって、前記建設機械毎に施工位置情報を前記施工管理部が前記建設機械に送信する施工情報送信工程と、前記建設機械毎に前記施工情報送信工程で送信された前記施工位置情報を前記建設機械が受信する施工情報受信工程と、前記建設機械毎に前記施工情報受信工程で受信した前記施工位置情報を用いて前記建設機械が自動運転で作業を行う自動運転作業工程と、を備える、建設機械の施工方法が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-132912号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術においては、施工管理部から施工現場の複数の建設機械それぞれに対して施工位置情報を送信する。施工現場の複数の建設機械は、それぞれが受信した施工位置情報に基づいて自動運転による作業を実行する。これにより、施工管理部による管理下において、複数の建設機械を自動運転で動作させることができる。
【0005】
また、施工システムを取り扱うオペレータは、建設機械が作業を実施している範囲を目視している際中に、通常と異なる状況が発生したと認識した場合、状況に合わせて建設機械に作業を停止させる指令、すなわち作業停止指令を発行する。作業停止指令は、施工管理部から送受信装置を介して各建設機械に送信され、建設機械による作業を停止させる。これにより、建設機械による作業において、通常と異なる状況の発生に伴う施工効率の低下を回避することを可能としている。
【0006】
しかしながら、上記従来技術においては、システム上での指令の発行対象と、指令を適用する実際の建設機械との対応付けが明示されていない。特に、同種の建設機械が複数台存在し並行して作業を行っている場合は、指令を発行する対象を特定するのに時間を要し、施工効率を低下させる可能性がある。また、オペレータの目視結果にもとづいて指令の発行対象を定めているため、発行対象を見誤り、異なる建設機械に指令を発行することで意図しない結果を発生させる可能性がある。さらに、確実に正しい対象に対して指令を発行できたかどうかを確認するには、実際に対象となる建設機械が指令通りの動作を開始するまで待たなければならず、施工効率を低下させる可能性がある。
【0007】
本発明は上記に鑑みてなされたものであり、操作対象の建設機械をより確実に指定することができるとともに、正しい操作対象への指令が発行されたか否かをより容易かつより短い時間で確認することができる建設機械の動作制御システムを提供することを目的とする。
【課題を解決するための手段】
【0008】
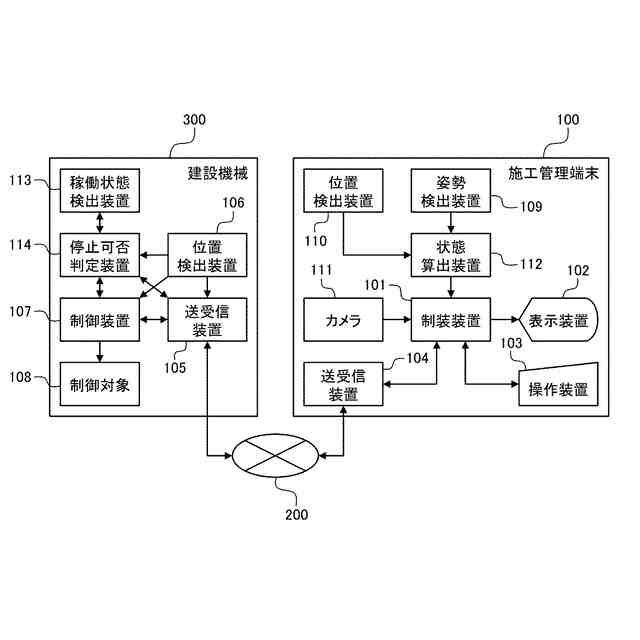
本願は上記課題を解決する手段を複数含んでいるが、その一例を挙げるならば、建設機械を操作するための制御情報を作成する施工管理端末と、前記制御情報に基づいて前記建設機械の動作を制御する機械制御装置と、を備えた建設機械の動作制御システムにおいて、前記施工管理端末の向きを検出する端末姿勢検出装置と、前記施工管理端末の位置を検出する端末位置検出装置と、前記建設機械の位置情報を検出する機械位置検出装置と、をさらに備え、前記施工管理端末は、施工現場を撮影するカメラと、前記カメラが撮影した前記施工現場を周囲映像として表示する表示装置と、前記表示装置に表示された前記周囲映像内の所定位置を操作者が指定するための操作装置と、前記制御情報を作成する端末制御装置と、を有し、前記端末制御装置は、操作者によって前記操作装置で指定された前記周囲映像内の前記所定位置と前記端末姿勢検出装置により検出された前記施工管理端末の向きと前記端末位置検出装置により検出された前記施工管理端末の位置とに基づいて、前記施工現場での前記所定位置に対応する指定領域の位置を算出し、前記指定領域の位置と前記機械位置検出装置により検出された前記建設機械の位置情報とに基づいて、前記指定領域内に前記建設機械が存在するかを判定し、前記指定領域内に前記建設機械が存在すると判定された場合、前記制御情報として前記建設機械を停止させる停止制御情報を作成すると共に、前記停止制御情報を前記機械制御装置へ出力するものとする。
【発明の効果】
【0009】
本発明によれば、操作対象の建設機械をより確実に指定することができるとともに、正しい操作対象への指令が発行されたか否かをより容易かつより短い時間で確認することができる。
【図面の簡単な説明】
【0010】
第1の実施の形態に係る建設機械の動作制御システムの構成を概略的に示す機能ブロック図である。
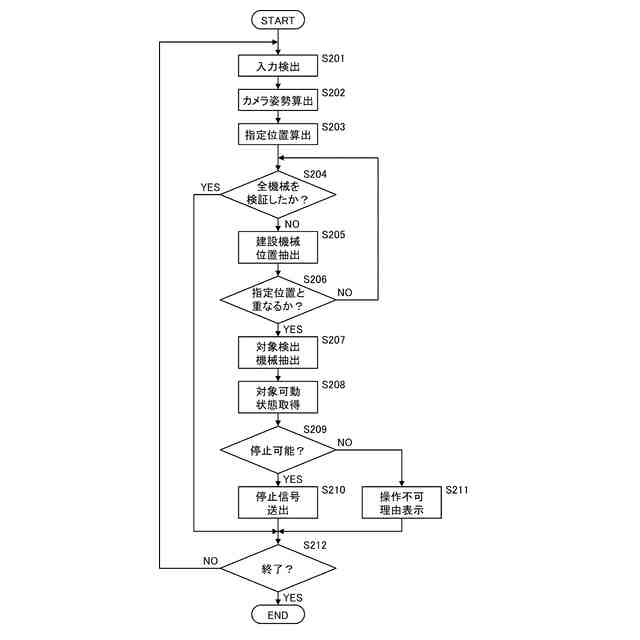
第1の実施の形態に係る建設機械の動作制御システムの処理を示すフローチャートである。
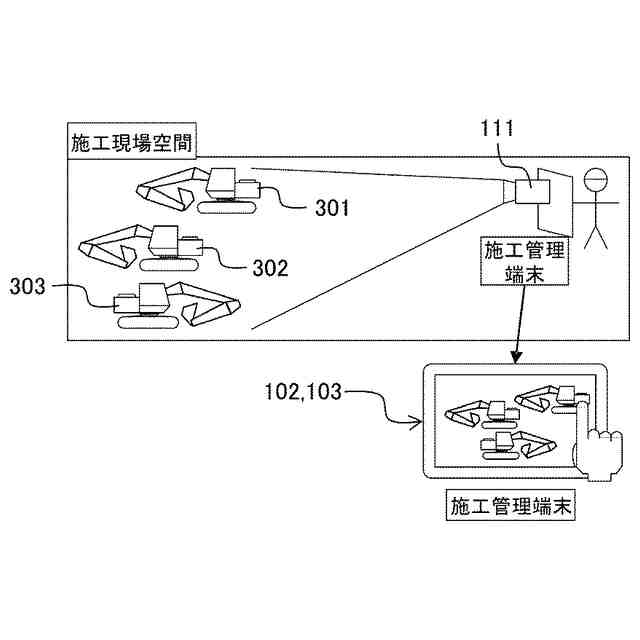
施工現場で建設機械が稼働している様子を例示する図である。
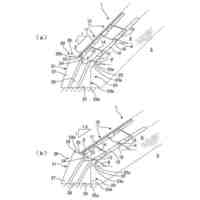
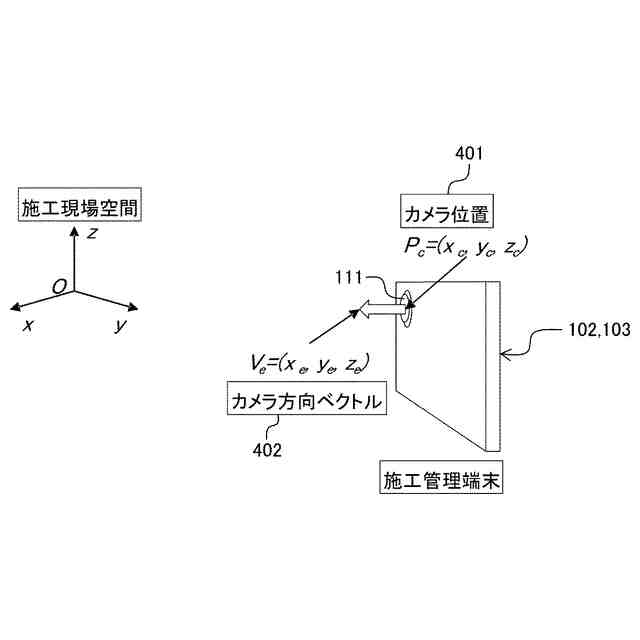
カメラの姿勢検出の基本原理を説明する図である。
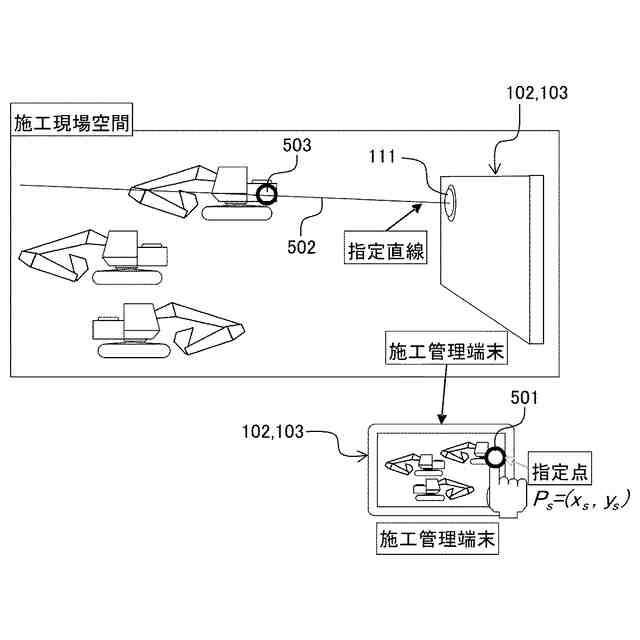
第1の実施の形態に係る操作装置による建設機械の指定の様子を示す図である。
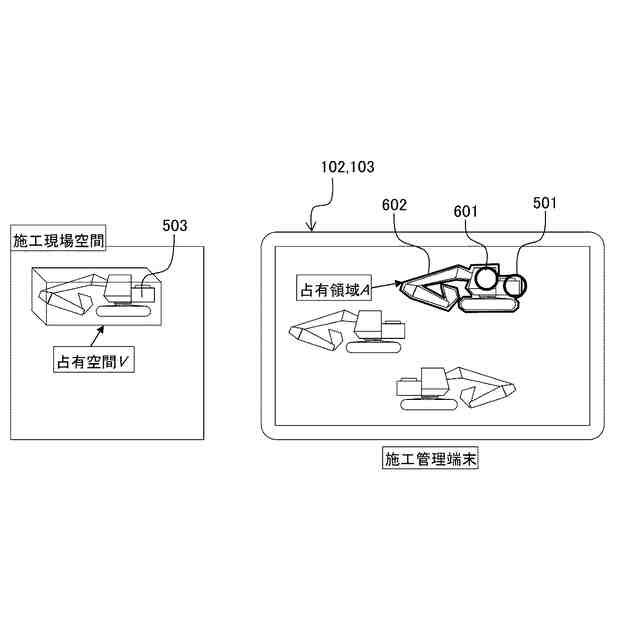
建設機械が施工管理端末の表示装置に表示される様子を示す図である。
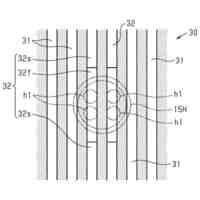
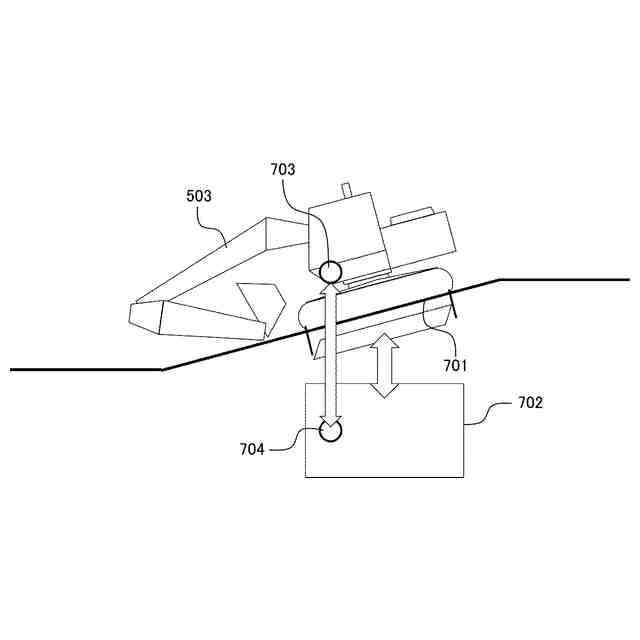
建設機械の停止可否の判定の原理を説明する図であって、ゼロモーメントポイントが指示多角形の内部にある場合を例示する図である。
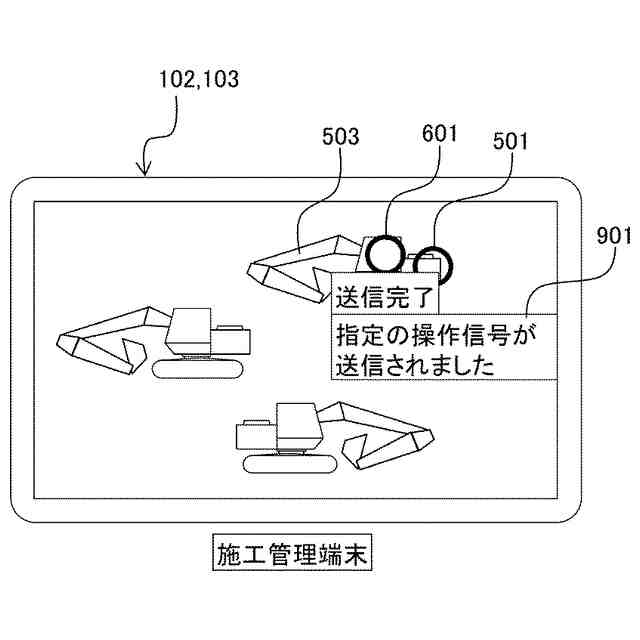
施工管理端末の表示装置に表示される情報の一例を示す図である。
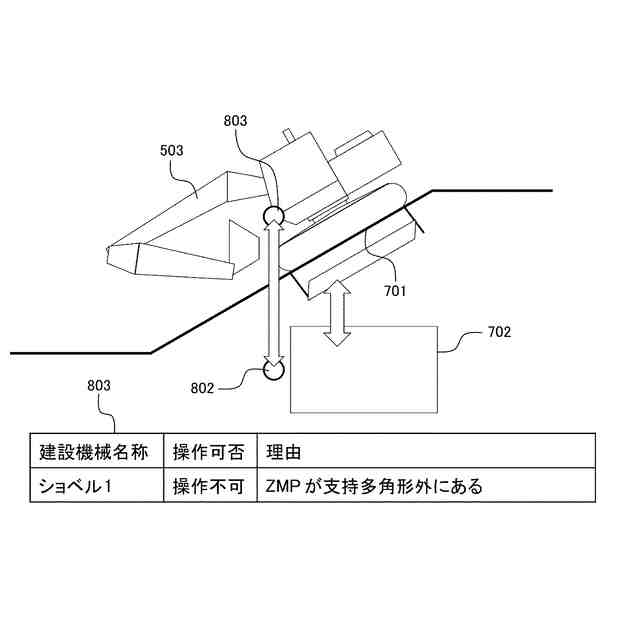
建設機械の停止可否の判定の原理を説明する図であって、ゼロモーメントポイントが指示多角形の外部にある場合を例示する図である。
施工管理端末の表示装置に表示される情報の一例を示す図である。
第2の実施の形態に係る操作装置による建設機械の指定の様子を示す図である。
第2の実施の形態に係る建設機械の動作制御システムの処理を示すフローチャートである。
第3の実施の形態に係る操作装置による建設機械の指定の様子を示す図である。
第3の実施の形態に係る建設機械の動作制御システムの処理を示すフローチャートである。
第4の実施の形態に係る操作装置による建設機械の指定の様子を示す図である。
第4の実施の形態に係る建設機械の動作制御システムの処理を示すフローチャートである。
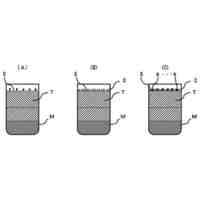
第5の実施の形態に係る表示装置における推定鉛直誤差の表示の一例を示す図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋監理
不同沈下修正機
19日前
株式会社エスイー
防災構造物
今日
個人
潜水式土運船と土砂降ろし方法
19日前
カナデビア株式会社
サクション基礎
19日前
株式会社大林組
建築物の基礎構造及び方法
5日前
株式会社オーイケ
擁壁および基礎ブロック
19日前
埼玉八栄工業株式会社
地盤撹拌装置
12日前
株式会社竹内製作所
作業用車両
9日前
株式会社竹内製作所
作業用車両
9日前
株式会社竹内製作所
作業用車両
5日前
株式会社加藤建設
固化材の吐出方法
今日
株式会社CSPホールディングス
杭抜き方法
5日前
株式会社本久
砂防ソイルセメント材の品質管理方法
9日前
ジャパンパイル株式会社
中空既製杭の吊り下げ装置
今日
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
建設機械
5日前
日立建機株式会社
作業機械
5日前
アロン化成株式会社
排水設備用蓋
19日前
株式会社みどり工学研究所
上下動抑制埋設支柱及び埋設工法
5日前
清水建設株式会社
山留め工法及び山留め構造
5日前
株式会社ササキコーポレーション
除去作業機
6日前
株式会社ササキコーポレーション
除去作業機
6日前
株式会社大林組
地中連続壁の構築方法及び地中連続壁
13日前
株式会社ヤマックス
擁壁構造体と重力式擁壁構造体の築造方法
13日前
大和ハウス工業株式会社
振動低減地盤構造およびその構築方法
今日
個人
ミサイル阻止・破壊が有っても、短期に修復できる階段ダム装置
5日前
株式会社マキタ
回転工具用アクセサリ
5日前
上海勘測設計研究院有限公司
洋上風力発電の単杭基礎及び施工方法
5日前
大和ハウス工業株式会社
杭引き抜き治具
19日前
JFEシビル株式会社
柱と杭との接合構造
19日前
株式会社竹内製作所
リモコンユニット、及び、作業用車両
12日前
株式会社竹内製作所
リモコンユニット、及び、作業用車両
12日前
筑豊金網工業株式会社
じゃかご
9日前
大和ハウス工業株式会社
増設構造体の脚部固定構造と脚部固定方法
今日
日立建機株式会社
建設機械のバケット用ツース
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ