TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030806
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136420
出願日
2023-08-24
発明の名称
建設機械
出願人
日立建機株式会社
代理人
弁理士法人相原国際知財事務所
主分類
E02F
9/24 20060101AFI20250228BHJP(水工;基礎;土砂の移送)
要約
【課題】機体周辺に障害物が存在する作業現場において、安全性を確保しつつ作業効率の向上を図る建設機械を提供する。
【解決手段】油圧ショベル1は、機体5と、機体5の可動範囲を設定する可動範囲設定装置と、障害物と機体との間の距離を検知する障害物検知センサと、可動範囲設定装置によって設定された可動範囲から機体5が逸脱すると判断したとき及び障害物検知センサによって障害物が検知されたときに、機体5の動作を制限する動作制限制御を行うコントローラと、を備え、コントローラは、可動範囲に応じて決定される非可動範囲S1に障害物があるときには動作制限制御を行わない。
【選択図】図7
特許請求の範囲
【請求項1】
走行動作が可能な下部走行体、前記下部走行体の上部に取付けられ、旋回動作が可能な上部旋回体及び前記上部旋回体に取付けられ、回動動作が可能な作業装置を含む機体と、
前記機体の可動範囲を設定する可動範囲設定装置と、
前記機体の周囲の障害物を検知する障害物検知装置と、
前記可動範囲設定装置によって設定された前記可動範囲から前記機体が逸脱すると判断したとき及び前記障害物検知装置によって障害物が検知されたときに、前記機体の動作を制限する動作制限制御を行うコントローラと、
を備える建設機械において、
前記コントローラは、前記可動範囲に応じて決定される非可動範囲に前記障害物があるときには前記動作制限制御を行わないことを特徴とする建設機械。
続きを表示(約 840 文字)
【請求項2】
前記コントローラは、前記障害物検知装置によって前記非可動範囲に前記障害物が検知された場合には、前記障害物を、前記動作制限制御を行なう対象ではないとみなし、前記動作制限制御を行わないことを特徴とする請求項1に記載の建設機械。
【請求項3】
前記コントローラは、
前記機体から第1距離以内の第1領域に前記障害物が検知された場合、前記動作制限制御を行い、前記機体から前記第1距離よりも長い第2距離から前記第1距離の間の第2領域に前記障害物が検知された場合、警報を報知する警報制御を行い、
前記障害物検知装置によって前記第1領域と前記非可動範囲との重複領域に前記障害物が検知された場合、前記障害物を、前記動作制限制御を行なう対象ではないとみなし、前記動作制限制御を行わないことを特徴とする請求項2に記載の建設機械。
【請求項4】
前記コントローラは、前記非可動範囲を前記障害物検知装置の検知範囲から除外することを特徴とする請求項1に記載の建設機械。
【請求項5】
前記コントローラは、
前記機体から第1距離以内の第1領域に前記障害物が検知された場合、前記動作制限制御を行い、前記機体から前記第1距離よりも長い第2距離から前記第1距離の間の第2領域に前記障害物が検知されたときに警報を報知する警報制御を行い、
前記第1領域と前記非可動範囲との重複領域を前記障害物検知装置の検知範囲から除外することを特徴とする請求項4に記載の建設機械。
【請求項6】
前記コントローラは、前記上部旋回体の旋回動作により前記機体が存在する範囲を前記可動範囲として設定することを特徴とする請求項1に記載の建設機械。
【請求項7】
前記コントローラは、前記下部走行体の走行動作により前記機体が存在する範囲を前記可動範囲として設定することを特徴とする請求項1に記載の建設機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は建設機械に関し、特に周囲の障害物を検知する障害物検知装置を有する建設機械に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
油圧ショベル等の建設機械には、作業現場における作業員の安全を確保する目的で、安全装置を備えて構成されるものがある(例えば特許文献1)。
【0003】
特許文献1に記載の建設機械は、複数に分割された領域内における障害物の存否を検知する複数のセンサを備え、当該センサで障害物の存在が検知されたとき、障害物の存在する監視領域に応じて構造体の運動速度の上限を低下させるように構成されている。具体的には、当該建設機械に比較的近い監視領域を担当しているセンサが障害物を検知した場合には操作油圧の上限がゼロに設定され、建設機械と障害物との距離が遠ざかるにつれて操作油圧の上限が徐々に大きくなるように設定される。これにより、最も危険な作業領域に障害物が存在する場合には操作手段の操作に関わりなく構造体の運動は停止し、遠ざかるにつれて構造体がより高い運動速度で動くように調整される。
【先行技術文献】
【特許文献】
【0004】
実開平5-64254号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、建設機械が使用される作業現場によっては、機体周辺に常に障害物が存在するような状況で、当該障害物に接触しないように注意を払いつつ機体を操作することも想定される。このような状況で作業する場合、特許文献1に記載の建設機械では常に障害物を検知し続けるおそれがある。この結果、当該建設機械に取付けられた構造体の運動速度の上限が常に制限されることになり、作業効率が低下するおそれがあった。
【0006】
本発明はこのような課題に鑑みてなされたものであり、その目的とするところは、機体周辺に障害物が存在する作業現場において、安全性を確保しつつ作業効率の向上を図る建設機械を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の建設機械は、走行動作が可能な下部走行体、前記下部走行体の上部に取付けられ、旋回動作が可能な上部旋回体、及び、前記上部旋回体に取付けられ、回動動作が可能な作業装置を含む機体と、前記機体の可動範囲を設定する可動範囲設定装置と、前記機体の周囲の障害物を検知する障害物検知装置と、前記可動範囲設定装置によって設定された前記可動範囲から前記機体が逸脱すると判断したとき及び前記障害物検知装置によって障害物が検知されたときに、前記機体の動作を制限する動作制限制御を行うコントローラと、を備える建設機械において、前記コントローラは、前記可動範囲に応じて決定される非可動範囲に前記障害物があるときには前記動作制限制御を行わないことを特徴とする。
【発明の効果】
【0008】
本発明の建設機械によれば、コントローラは、可動範囲設定装置によって設定された機体の可動範囲に応じて決定される機体の非可動範囲に障害物があっても、機体の動作制御制御を行わない。したがって、機体周辺の非可動範囲に常に障害物が存在する状況で作業する場合であっても、この障害物によって機体の動作が制限されないため、安全性を確保しつつ建設機械による作業効率の向上を図ることができる。
【図面の簡単な説明】
【0009】
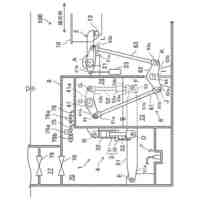
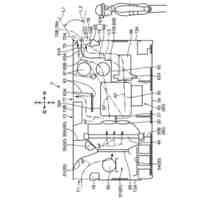
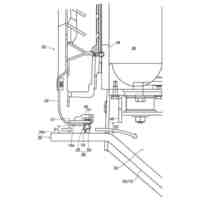
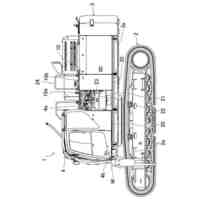
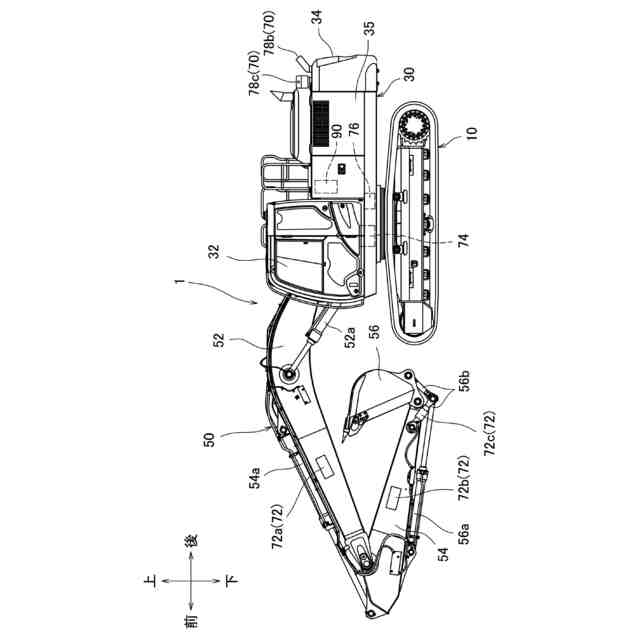
本発明の第1実施形態に係る油圧ショベルの全体構成を概略的に示す側面図である。
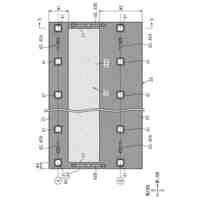
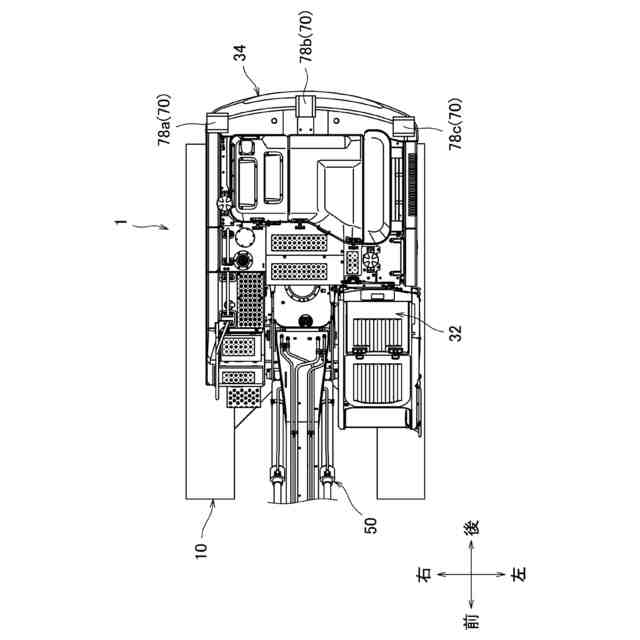
図1に示す油圧ショベルの一部分を概略的に示す平面図である。
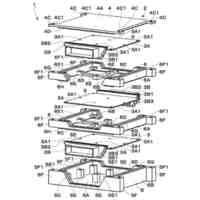
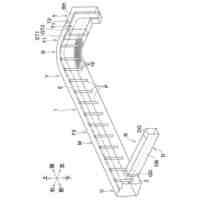
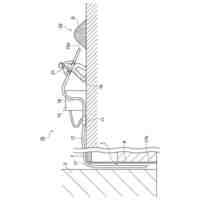
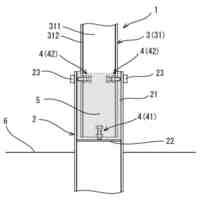
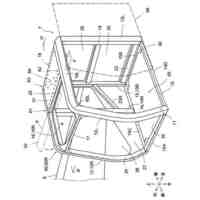
図1に示す油圧ショベルに搭載されたキャブを概略的に示す斜視図であり、その一部を破断して示すものである。
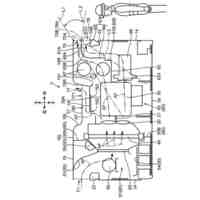
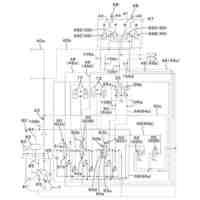
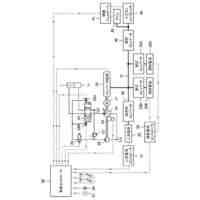
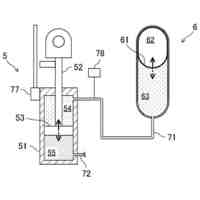
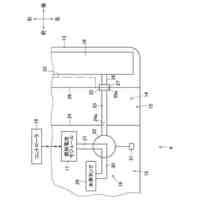
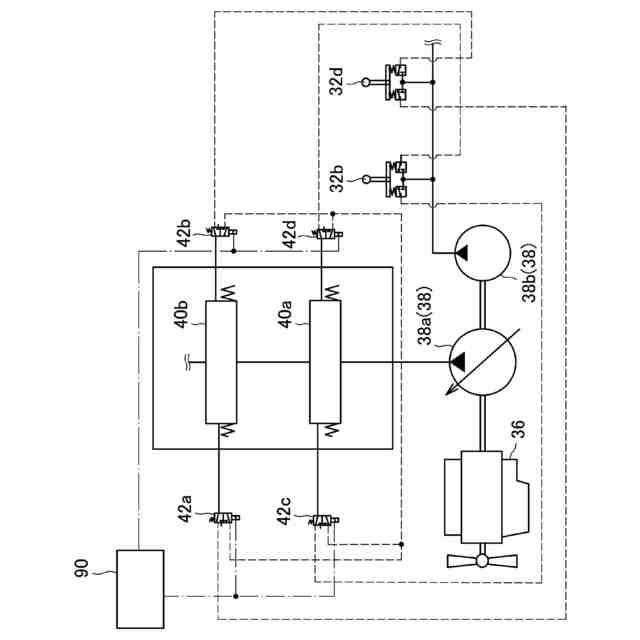
図1に示す油圧ショベルの機体の動作制御を行うための油圧回路を概略的に示す油圧回路図である。
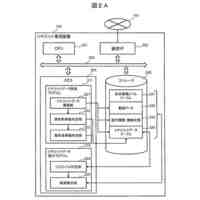
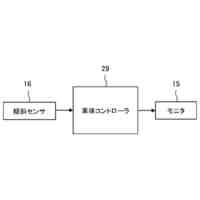
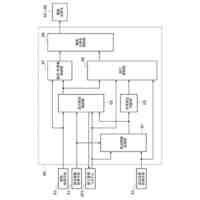
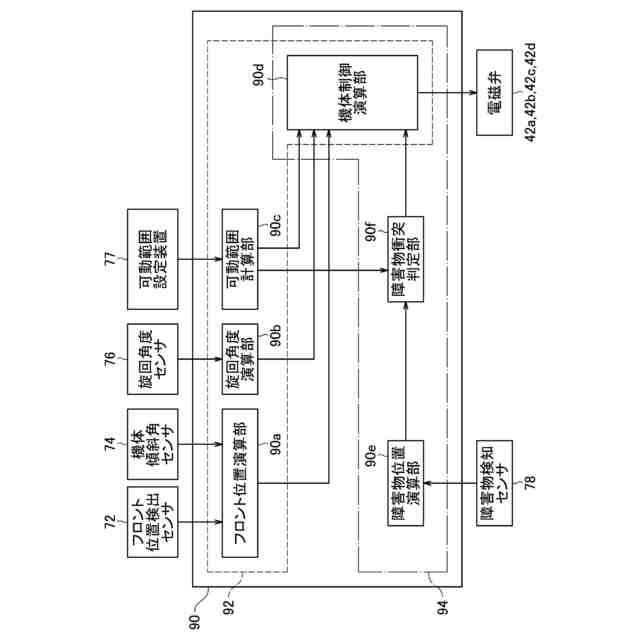
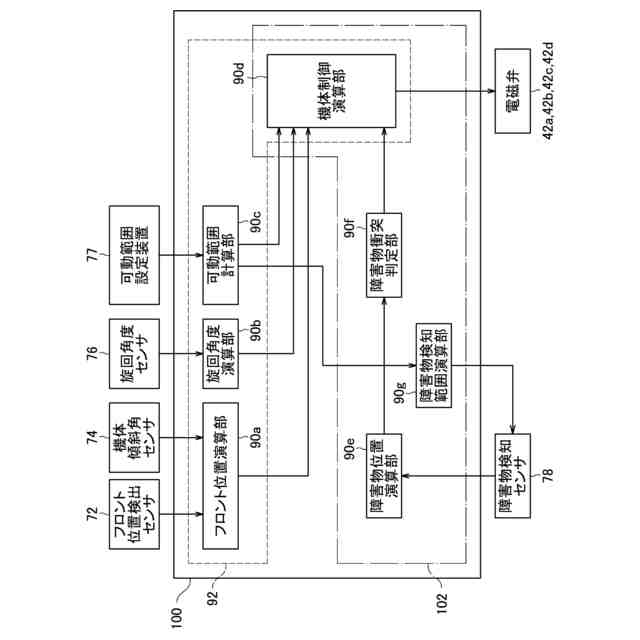
図1に示す油圧ショベルの機体の動作制御を行うため機能ブロック図を概略的に示すものであり、コントローラを中心とした入出力経路を示すものである。
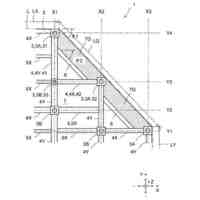
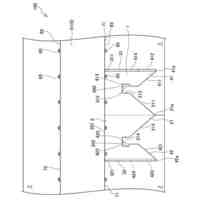
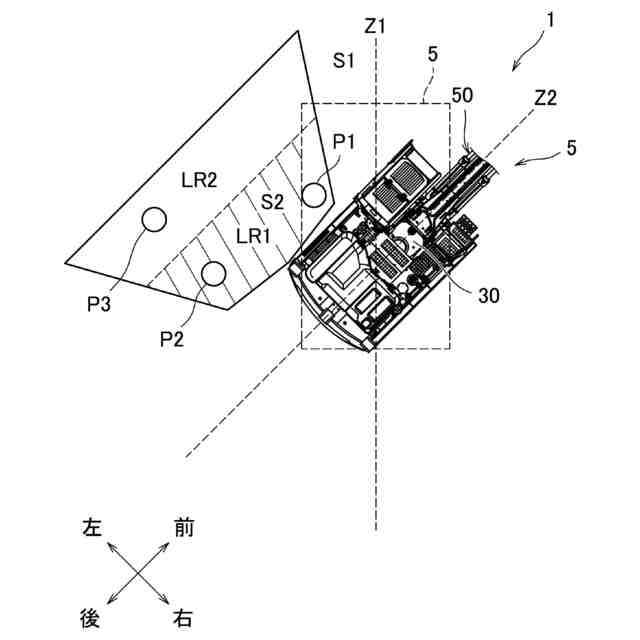
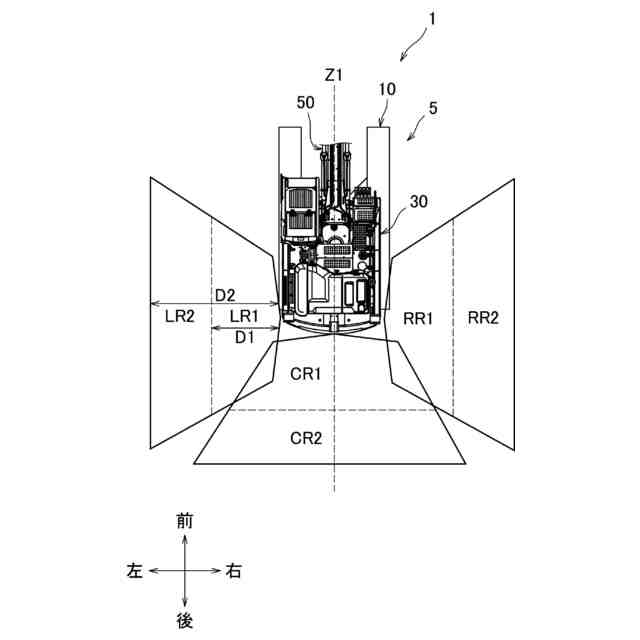
図1に示す油圧ショベルの上部旋回体を旋回動作させる前の状態での、障害物検知センサの検知範囲の一例を示す図である。
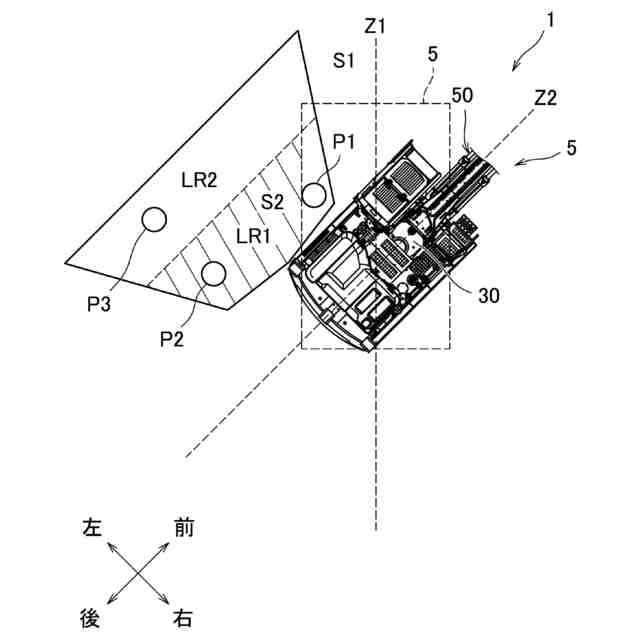
図1に示す油圧ショベルの上部旋回体を設定された可動範囲で旋回動作させた場合の、障害物検知センサの検知範囲と障害物との位置関係の一例を示す図である。
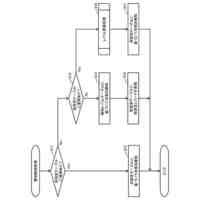
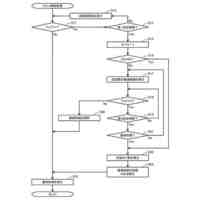
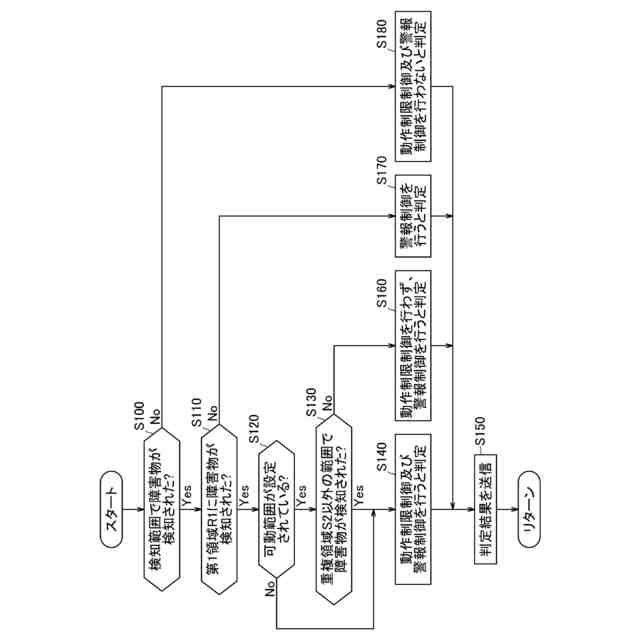
図1に示す油圧ショベルに搭載されるコントローラで実行される機体の動作制御及び警報制御に関する制御フローの一例を示すものである。
本発明の第2実施形態に係る油圧ショベルの機体の動作制御を行うため機能ブロック図を概略的に示すものであり、コントローラを中心とした入出力経路を示すものである。
本発明の第2実施形態に係る油圧ショベルの上部旋回体を設定された可動範囲で旋回動作させた場合の、障害物検知センサの検知範囲と障害物との位置関係の一例を示す図である。
本発明の第2実施形態に係る油圧ショベルに搭載されるコントローラで実行される機体の動作制御及び警報制御に関する制御フローの一例を示すものである。
本発明の第3実施形態に係る油圧ショベルの全体構成を概略的に示す側面図である。
図12に示す油圧ショベルの機体の動作制御を行うため機能ブロック図を概略的に示すものであり、コントローラを中心とした入出力経路を示すものである。
図12に示す油圧ショベルの下部走行体を設定された可動範囲で走行動作させた場合の、障害物検知センサの検知範囲と障害物との位置関係の一例を示す図である。
図12に示す油圧ショベルの下部走行体を設定された可動範囲で走行動作させた場合の、障害物検知センサの検知範囲と障害物との位置関係の他の例を示す図である。
【発明を実施するための形態】
【0010】
<第1実施形態>
以下、図面に基づき本発明の第1実施形態について説明する。第1実施形態では、建設機械としてクローラ式の油圧ショベル1(以下、「油圧ショベル1」という。)を例に挙げて説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
コントローラの筐体
2日前
日立建機株式会社
情報処理装置および情報処理方法
18日前
個人
長尺平板パネル
23日前
個人
透過型堰堤
10日前
個人
構造物の検査方法
24日前
鹿島建設株式会社
鉄筋かご
8日前
株式会社東部
多翼型鋼管杭
26日前
個人
津波防御三段壁浮上システム。
16日前
カナデビア株式会社
起伏ゲート
24日前
株式会社大林組
基礎構造
1か月前
中部電力株式会社
沈砂池
8日前
日本車輌製造株式会社
杭打機
26日前
コベルコ建機株式会社
作業機械
8日前
コベルコ建機株式会社
作業機械
8日前
株式会社クボタ
作業機
1か月前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
株式会社奥村組
建物の基礎構造
2日前
中部美化企業株式会社
水門装置
2日前
カナデビア株式会社
浮体構造体
16日前
コベルコ建機株式会社
作業機械
8日前
鹿島建設株式会社
埋戻し方法
16日前
東陽商事株式会社
スイベルの共回り防止装置
10日前
構法開発株式会社
埋込継手構造
23日前
プレス工業株式会社
建設機械のキャビン
8日前
カナデビア株式会社
係留装置及びその制御方法
24日前
株式会社クボタ
フロントローダ及び作業車両
23日前
株式会社SEELS
フェンダー用カバー部材
17日前
株式会社竹内製作所
土砂侵入防止構造
2日前
株式会社エンバイン
連結具及び盛土構造
16日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
1か月前
マックストン株式会社
シート敷設用アンカーブロック
9日前
日立建機株式会社
作業機械
1か月前
コベルコ建機株式会社
作業機械
12日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ