TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025030805
公報種別
公開特許公報(A)
公開日
2025-03-07
出願番号
2023136419
出願日
2023-08-24
発明の名称
建設機械
出願人
日立建機株式会社
代理人
弁理士法人相原国際知財事務所
主分類
E02F
9/20 20060101AFI20250228BHJP(水工;基礎;土砂の移送)
要約
【課題】応力を検出するためのセンサを用いることなく、作業装置の負荷を適切な状況で低減可能な建設機械を提供する。
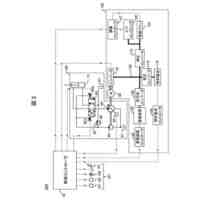
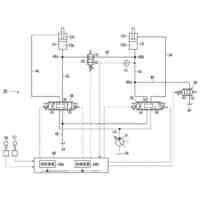
【解決手段】油圧ショベル1Aにおいて、油圧駆動回路30は、ポンプ31と作動油を貯留する貯留タンク32とを接続する経路上に配置され、ポンプ31の吐出圧の上限値としてのリリーフ圧を規定するリリーフバルブ35を有し、制御装置50は、姿勢センサおよび力センサの検出値に基づいて、作業装置が所定の高負荷状態で運用されていることを判定したとき、作業装置20が所定の高負荷状態で運用されていないと判定したときに比べて、リリーフ圧を低い値に設定する。
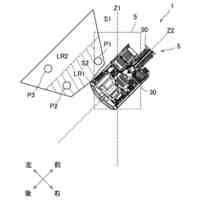
【選択図】図2
特許請求の範囲
【請求項1】
作業機本体と、
前記作業機本体に対して回転可能なブームと、前記ブームに対して回転可能なアームと、前記アームに対して回転可能な作業具とを有する作業装置と、
前記作業装置を駆動する複数の油圧アクチュエータと、前記油圧アクチュエータへ作動油を供給するポンプとを有する油圧駆動回路と、
前記作業装置の姿勢を検出する姿勢センサと、
前記作業装置に作用する力を検出する力センサと、
前記油圧駆動回路を制御する制御装置と
を備えた建設機械において、
前記力センサは、前記油圧アクチュエータに供給される作動油の圧力を検出するセンサであり、
前記油圧駆動回路は、前記ポンプと作動油を貯留する貯留タンクとを接続する経路上に配置され、前記ポンプの吐出圧の上限値としてのリリーフ圧を規定するリリーフバルブを有し、
前記制御装置は、前記姿勢センサおよび前記力センサの検出値に基づいて、前記作業装置が所定の高負荷状態で運用されていることを判定したとき、前記作業装置が前記所定の高負荷状態で運用されていないと判定したときに比べて、前記リリーフ圧を低い値に設定することを特徴とする建設機械。
続きを表示(約 1,100 文字)
【請求項2】
前記姿勢センサは、前記ブームの位置と前記アームの位置とを検出するセンサであり、
前記力センサは、前記アームを駆動する油圧式のアームシリンダに供給される作動油の圧力を検出するセンサであり、
前記制御装置は、前記ブームの位置と前記アームの位置とに基づいて、前記作業装置を所定の動作範囲内で動作させて、上下方向に延びる面から作業の被対象物を下方へと落とす掻き落とし作業を行っていると判定すると共に、前記アームシリンダに供給される作動油の圧力が所定圧以上であると判定したとき、前記作業装置が前記所定の高負荷状態で運用されていると判定することを特徴とする請求項1に記載の建設機械。
【請求項3】
前記制御装置は、前記姿勢センサにより、
前記ブームの位置が、最上げ状態の第1ブーム位置から、前記アームがグラウンドレベルに対して垂直となる状態で前記作業具の先端が描く軌跡の最下端が前記グラウンドレベルに接する状態の第2ブーム位置までの範囲内であり、
かつ、
前記アームの位置が、アームダンプエンドの第1アーム位置から、前記ブームが前記第2ブーム位置にある状態で前記アームが前記グラウンドレベルに対して垂直となる第2アーム位置までの範囲内であると検出されたときに、
前記作業装置を前記所定の動作範囲内で動作させて前記掻き落とし作業を行っていると判定することを特徴とする請求項2に記載の建設機械。
【請求項4】
前記制御装置は、
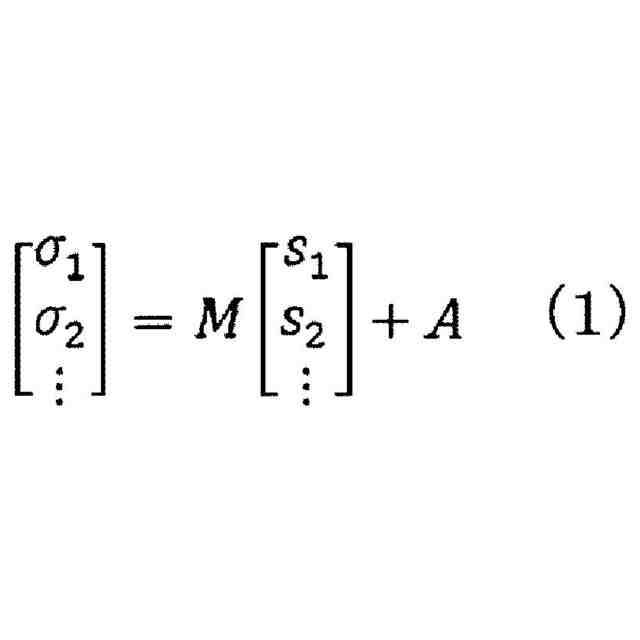
前記姿勢センサおよび前記力センサの検出値に基づいて、前記作業装置の複数の部位に作用する応力を演算し、
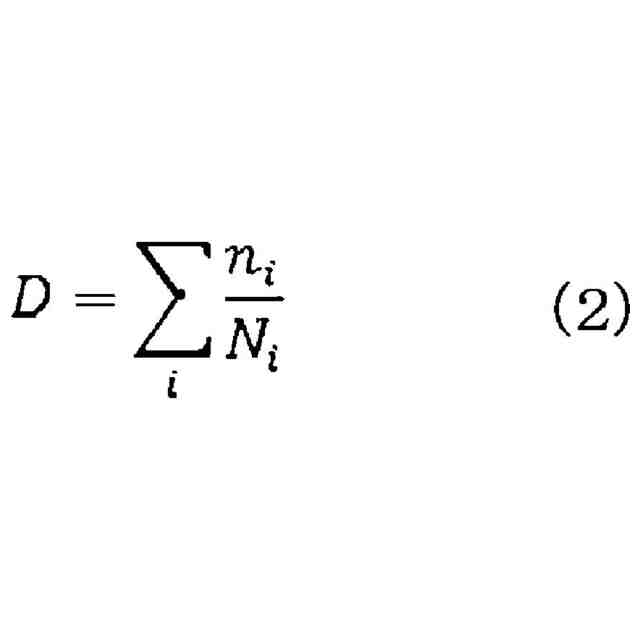
演算した応力に基づいて前記複数の部位の所定期間内における累積損傷度を演算し、
演算した前記所定期間内における前記累積損傷度に基づいて、前記作業装置が前記所定の高負荷状態で運用されているか否かを判定することを特徴とする請求項1に記載の建設機械。
【請求項5】
前記制御装置は、前記所定期間内における前記累積損傷度に、所定条件で前記複数の部位ごとの重み付けがされた疲労インデックス値を演算し、前記疲労インデックス値が第1閾値以上であるとき、前記作業装置が前記所定の高負荷状態で運用されていると判定することを特徴とする請求項4に記載の建設機械。
【請求項6】
前記制御装置は、すべての前記部位の前記疲労インデックス値が前記第1閾値未満であり、かつ、前記疲労インデックス値が前記第1閾値以上であると判定された前記部位について、前記疲労インデックス値が前記第1閾値よりも低い第2閾値未満まで減少したとき、前記作業装置が前記所定の高負荷状態で運用されていないと判定することを特徴とする請求項5に記載の建設機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は建設機械に関し、特に作業装置の高負荷状態での運用を抑制する建設機械に関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
従来、建設機械の作業装置(フロント構造物)について、高負荷状態での運用を抑制するための技術が知られている。例えば特許文献1には、ブームおよびアームにひずみゲージを設け、ひずみゲージにより検出される負荷信号が基準を超えたときに、ブームシリンダやアームシリンダの油圧操作式コントロール弁のパイロット弁(比例電磁弁)の操作信号を制限する油圧ショベルの操作システムが記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2012-72636号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、建設機械の作業装置の負荷を精度良く検出するためには、ひずみゲージといった作業装置に作用するひずみを検出するためのセンサ、言い換えると、応力を検出するためのセンサが多数必要となる。そのため、リード線の配策やセンサ取り付け部のグラインダーによる表面塗装の除去、センサ取り付け後の防錆処理、防水処理など、大きな工数を要する作業を伴い、作業負担が大きい。また、リード線の断線といった異常が生じた場合、修理交換作業が必要となる。さらに、センサの寿命上、長期的な使用に適さない。
【0005】
一方で、応力を検出するためのセンサがなければ、作業装置が高負荷状態で運用されているか否かを適切に判定することが難しい。そのため、適切な判定がなされない状態で、上記特許文献1に記載の油圧ショベルのように、ブームシリンダやアームシリンダへの作動油量が制限されると作業量の低下を招く可能性がある。したがって、作業装置の負荷を低減させるべき状況を適切に判定することが求められる。
【0006】
本発明はこのような課題に鑑みてなされたものであり、その目的とするところは、応力を検出するためのセンサを用いることなく、作業装置の負荷を適切な状況で低減可能な建設機械を提供することにある。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の建設機械は、作業機本体と、前記作業機本体に対して回転可能なブームと、前記ブームに対して回転可能なアームと、前記アームに対して回転可能な作業具とを有する作業装置と、前記作業装置を駆動する複数の油圧アクチュエータと、前記油圧アクチュエータへ作動油を供給するポンプとを有する油圧駆動回路と、前記作業装置の姿勢を検出する姿勢センサと、前記作業装置に作用する力を検出する力センサと、前記油圧駆動回路を制御する制御装置とを備えた建設機械において、前記力センサは、前記油圧アクチュエータに供給される作動油の圧力を検出するセンサであり、前記油圧駆動回路は、前記ポンプと作動油を貯留する貯留タンクとを接続する経路上に配置され、前記ポンプの吐出圧の上限値としてのリリーフ圧を規定するリリーフバルブを有し、前記制御装置は、前記姿勢センサおよび前記力センサの検出値に基づいて、前記作業装置が所定の高負荷状態で運用されていることを判定したとき、前記作業装置が前記所定の高負荷状態で運用されていないと判定したときに比べて、前記リリーフ圧を低い値に設定することを特徴とする。
【発明の効果】
【0008】
本発明の建設機械によれば、応力を検出するためのセンサを用いることなく、作業装置の負荷を適切な状況で低減可能となる。
【図面の簡単な説明】
【0009】
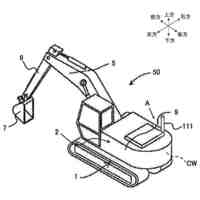
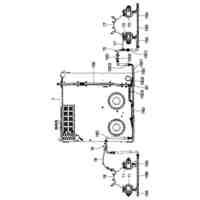
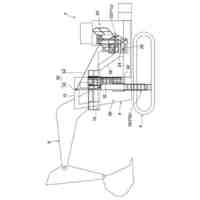
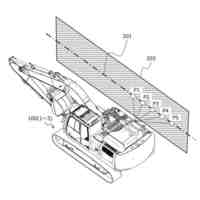
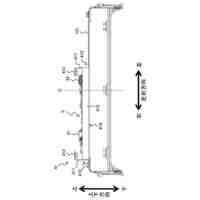
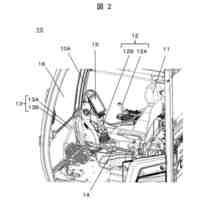
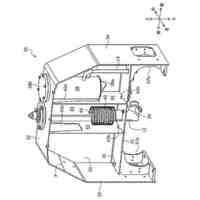
建設機械としての油圧ショベルを示す概略構成図である。
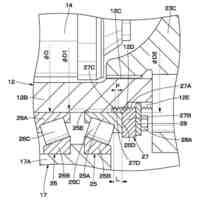
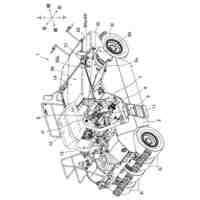
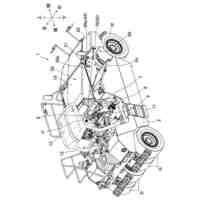
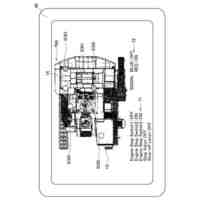
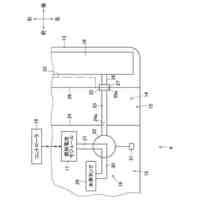
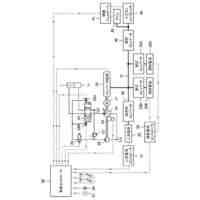
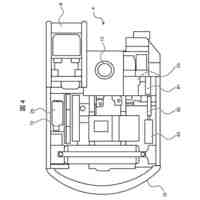
油圧駆動回路を示す概略構成図である。
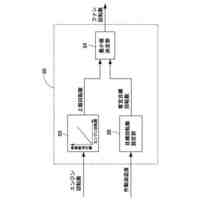
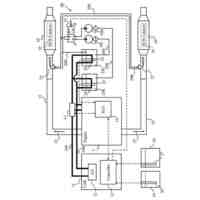
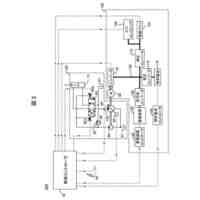
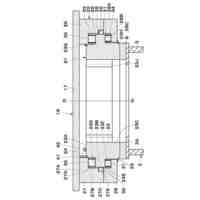
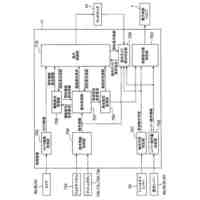
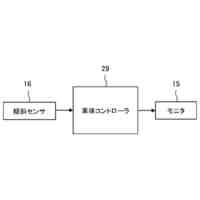
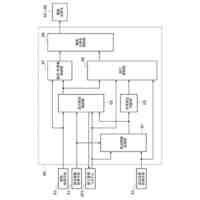
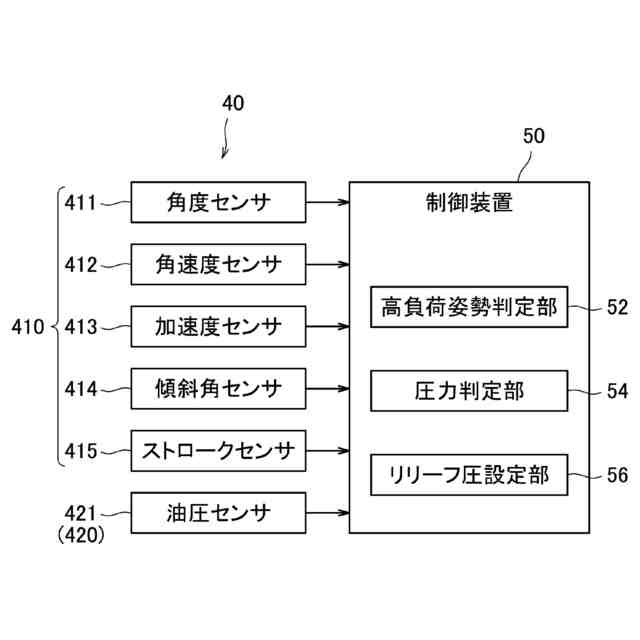
複数のセンサおよび制御装置を示す概略構成図である。
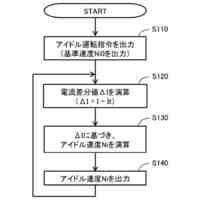
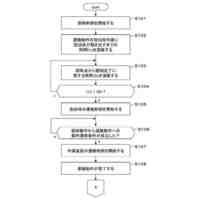
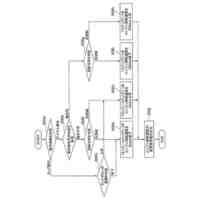
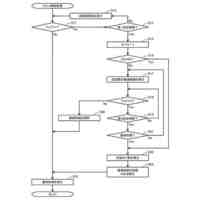
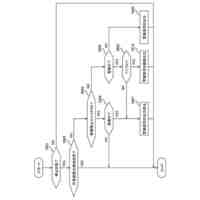
第1実施形態において制御装置により実行される負荷低減制御の処理の一例を示すフローチャートである。
作業装置が高負荷姿勢で動作している状態を模式的に示す説明図である。
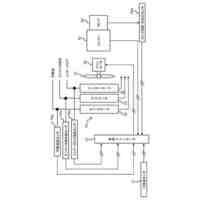
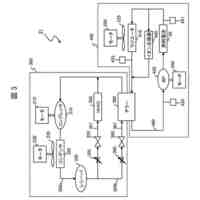
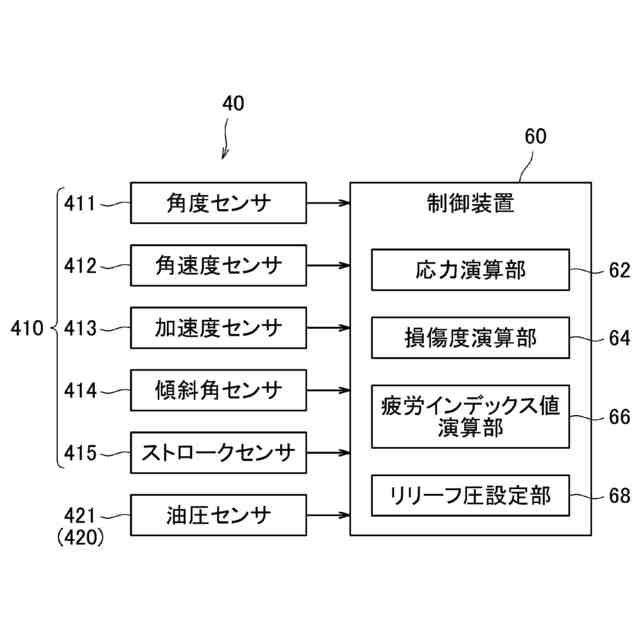
第2実施形態にかかる油圧ショベルが備える制御装置および複数のセンサを示す概略構成図である。
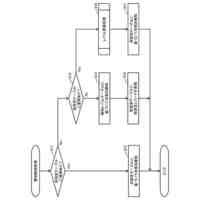
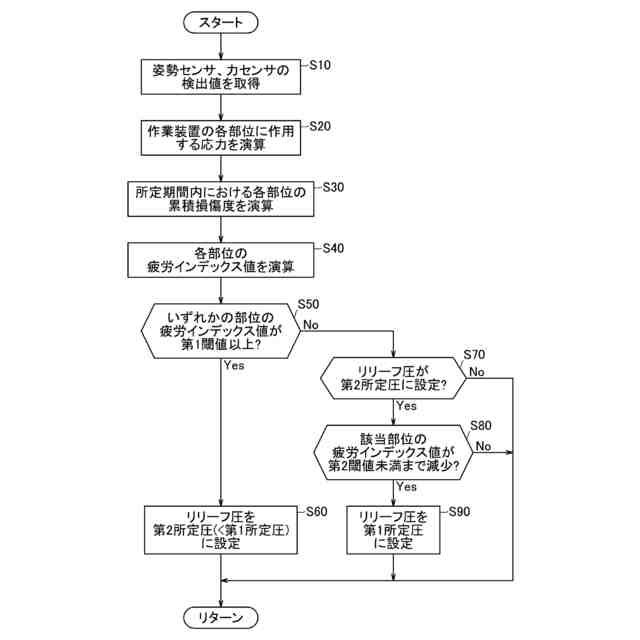
第2実施形態において制御装置により実行される負荷低減制御の処理の一例を示すフローチャートである。
応力を演算する対象となる作業装置の各部位を模式的に示す説明図である。
累積損傷度と疲労インデックス値との関係を規定したマップの一例を示す説明図である。
累積損傷度と疲労インデックス値との関係を規定したマップの他の例を示す説明図である。
累積損傷度と疲労インデックス値との関係を規定したマップのさらに他の例を示す説明図である。
【発明を実施するための形態】
【0010】
以下、図面に基づき本発明の実施形態について説明する。以下の説明においては、建設機械に搭乗した運転者を主体として、建設機械の前後方向、左右方向および上下方向を表現する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
21日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
作業車両
6日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
運搬車両
6日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
建設機械
24日前
日立建機株式会社
走行装置
7日前
日立建機株式会社
作業機械
13日前
日立建機株式会社
作業機械
6日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
転圧機械
13日前
日立建機株式会社
転圧機械
13日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
建設機械
12日前
日立建機株式会社
建設機械
6日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
建設機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
建設機械
4日前
日立建機株式会社
建設機械
1か月前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
1か月前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
5日前
日立建機株式会社
作業機械
28日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ