TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024168945
公報種別
公開特許公報(A)
公開日
2024-12-05
出願番号
2023086023
出願日
2023-05-25
発明の名称
建設機械
出願人
株式会社不二越
代理人
個人
,
個人
主分類
E02F
3/43 20060101AFI20241128BHJP(水工;基礎;土砂の移送)
要約
【課題】作業時間の増大を抑制しつつ、作業装置の制限領域への進入を回避することができる建設機械を提供する。
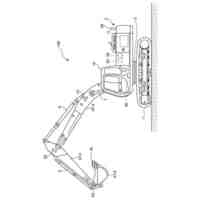
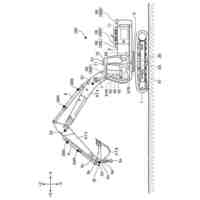
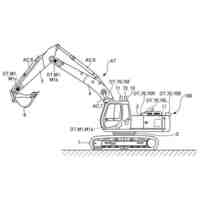
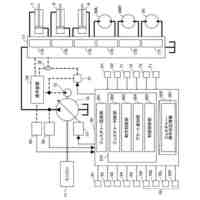
【解決手段】建設機械100は、被駆動部材114、116、118を連結した作業装置104と、被駆動部材を駆動する油圧アクチュエータ120、122、124と、油圧アクチュエータの動作を操作する複数の操作装置112と、被駆動部材の進入を制限する制限領域α、制限領域に隣接する減速領域β、被駆動部材上に設定された進入検知点を記憶する記憶装置128と、油圧アクチュエータの動作を制御する制御装置130とを備え、制御装置は、操作装置が操作されて進入検知点が減速領域内に進入すると、進入検知点の移動速度を、制限領域と減速領域との境界面である制限領域境界面Pの法線方向成分と接線方向成分とに分解し、法線方向成分が制限領域に向かっている場合にのみ、法線方向成分を減速させるように油圧アクチュエータの動作を制御する。
【選択図】図2
特許請求の範囲
【請求項1】
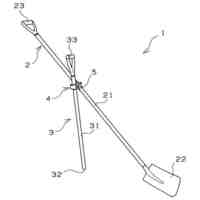
複数の被駆動部材を連結して構成された多関節型の作業装置と、
前記複数の被駆動部材を駆動する複数の油圧アクチュエータと、
前記複数の油圧アクチュエータの動作を操作する複数の操作装置と、
前記被駆動部材の進入を制限する制限領域と、該制限領域に隣接する減速領域と、前記複数の被駆動部材上に設定された進入検知点とを記憶する記憶装置と、
前記複数の油圧アクチュエータの動作を制御する制御装置とを備え、
前記制御装置は、
前記操作装置が操作されて前記進入検知点が前記減速領域内に進入すると、前記進入検知点の移動速度を、前記制限領域と前記減速領域との境界面である制限領域境界面の法線方向成分と接線方向成分とに分解し、
前記法線方向成分が前記制限領域に向かっている場合にのみ、該法線方向成分を減速させるように前記複数の油圧アクチュエータの動作を制御することを特徴とする建設機械。
続きを表示(約 210 文字)
【請求項2】
前記制御装置は、前記複数の油圧アクチュエータのうち、作業員が操作していない油圧アクチュエータの動作を制御することを特徴とする請求項1に記載の建設機械。
【請求項3】
前記制御装置は、前記進入検知点が前記制限領域に進入した場合は、該進入検知点の移動速度の法線方向成分を、前記進入検知点が前記制限領域から出る方向に補正することを特徴とする請求項1または2に記載のアクチュエータ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、多関節型の作業装置を備えた建設機械に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
建設機械である油圧ショベルは、多関節型の作業装置(フロント装置)と操作装置とを備える。フロント装置は、ブームやアームなどの回転運動を行う複数の剛体で構成されている。また操作装置は、フロント装置の各剛体の回転運動に対応した操作レバーなどである。作業員(オペレータ)は、例えば操作レバーを自由に操作することによって、法面整形や整地などの作業を行う。
【0003】
オペレータには、これらの作業を行うための高度な技術が要求される。一例として、市街地などで作業をする場合は、フロント装置が周囲の物体(地中の電線や壁など)に干渉しないように注意しなければならない。そこで建設機械の分野では、フロント装置と周囲の物体との干渉を防止するための種々の提案がなされている。
【0004】
特許文献1には、掘削作業機の作業領域制御装置が記載さされている。この作業領域制御装置では、制限領域の手前に減速領域を設定し、フロント装置を構成するフロント部品(例えばバケット)が減速領域に進入すると、操作レバーの操作信号に減衰係数を乗じることでフロント装置を減速し、バケットが禁止領域の境界に達すると停止するようにしている。
【0005】
特許文献1の作業領域制御装置によれば、各フロント部品の任意の位置に制限領域への進入を判定する点を設けることによって、全てのフロント部品の制限領域への進入を監視することができる。
【0006】
特許文献2には、建設機械の領域制限掘削制御装置が記載されている。この領域制限掘削制御装置では、掘削可能領域を設定し、フロント装置の一部(例えばバケット)が掘削可能領域の境界に近づくと、バケットの当該境界に向かう方向の動きを減速し、バケットが掘削可能領域の境界に達すると、バケットは掘削可能領域の外には出ないが、掘削可能領域の境界に沿って動けるようにしている。
【0007】
さらに建設機械の分野に限らず、ロボットの分野においても、ロボットアームがほかの物体と衝突することを防止する技術の開発が活発に行われている(例えば特許文献3)。特許文献3には、減衰領域と制限領域を設け、ロボットが減衰領域に進入すると減速させて、制限領域内に進入する危険性を低下させるロボット制御装置が記載されている。
【先行技術文献】
【特許文献】
【0008】
特開平4-136324号公報
国際公開公報第95/30059号
特開2022-131424号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかし特許文献1の作業領域制御装置および特許文献3のロボット制御装置では、減衰領域内で領域を離れる方向に移動させる場合においても、減衰が適応されるため、余計な作業時間が増えてしまう。特許文献2は、バケット先端を基準とした制限領域への進入を制限することについて記載しているに過ぎず、他のフロント部品が制限領域に進入した際の動作について対策が講じられていない。
【0010】
また油圧ショベルの作業において、バケットシリンダやアームシリンダを最長または最短になるように操作し、バケットとアームの姿勢を設定する動作を行う場合がある。この場合、特許文献1、2の技術を用いて、狭い作業空間で上記の動作を行うと、フロント部品が制限領域境界面に接触し、停止動作を繰り返して、操作性を大きく損なうことが有り得る。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
情報処理装置及びプログラム
2日前
株式会社不二越
合金鋼およびそれを用いた機械部品
2日前
個人
耐震原子炉設備
9日前
FKS株式会社
擁壁
14日前
株式会社forch
土採取装置
15日前
鹿島建設株式会社
基礎構造
8日前
株式会社竹中工務店
建築方法
6日前
株式会社クボタ
作業車
今日
株式会社竹中工務店
杭基礎構造
22日前
株式会社富田製作所
継手部構造
8日前
住友建機株式会社
ショベル
21日前
住友建機株式会社
ショベル
今日
住友建機株式会社
ショベル
今日
住友建機株式会社
ショベル
13日前
住友建機株式会社
作業機械
1日前
住友建機株式会社
ショベル
7日前
住友建機株式会社
ショベル
13日前
住友建機株式会社
ショベル
今日
住友建機株式会社
ショベル
13日前
住友建機株式会社
電動ショベル
20日前
日立建機株式会社
作業機械
20日前
株式会社クボタ
作業機
8日前
株式会社テノックス九州
地盤改良方法
20日前
株式会社クボタ
作業車両
6日前
日立建機株式会社
建設機械
8日前
住友重機械工業株式会社
ショベル
14日前
住友重機械工業株式会社
ショベル
2日前
大仲建設株式会社
スコップ
6日前
ナブテスコ株式会社
ショベルカー
20日前
エバタ株式会社
下水道施設の再構築方法
13日前
住友重機械工業株式会社
ショベル
今日
大成建設株式会社
杭基礎構造
14日前
戸田建設株式会社
杭頭空間形成装置
2日前
住友重機械工業株式会社
作業機械の制御装置
6日前
ヤンマーホールディングス株式会社
作業機械
7日前
株式会社マキタ
打撃工具
今日
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ