TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165444
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023081656
出願日
2023-05-17
発明の名称
杭打機の制御装置
出願人
日本車輌製造株式会社
代理人
個人
,
個人
主分類
E02D
7/14 20060101AFI20241121BHJP(水工;基礎;土砂の移送)
要約
【課題】杭打機の運転状態に応じた最適時に転倒警告を発することが可能な制御装置を提供する。
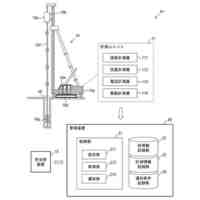
【解決手段】上部旋回体にクローラ式の下部走行体を走行させる操作がなされる運転室が設置され、該運転室に設けられた走行操作装置の操作を受けて下部走行体の走行を制御する杭打機の制御装置41において、杭打機の運動状態及び姿勢変化を計測する慣性計測装置(IMU)43と、杭打機の重心位置を含む設計情報を記憶する記憶部42と、慣性計測装置で取得した計測情報及び前記設計情報に基づいて転倒モーメント、あるいは、クローラの接地反力を算出し、杭打機が転倒するおそれの有無を判定する転倒判定部44と、転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部45とを有している。
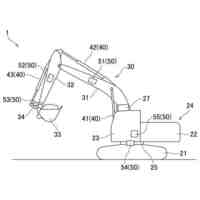
【選択図】図3
特許請求の範囲
【請求項1】
左右一対のクローラを備えた下部走行体及び該下部走行体の上部に旋回可能に設けられた上部旋回体からなるベースマシンと、前記上部旋回体の前部に起伏可能に設けられたリーダと、該リーダを前記上部旋回体の後部から支持する左右一対のバックステーと、前記リーダの前面に沿って昇降可能に設けられたオーガとを備え、
前記上部旋回体に前記下部走行体を走行させる操作がなされる運転室が設置され、該運転室に設けられた走行操作装置の操作を受けて前記下部走行体の走行を制御する杭打機の制御装置において、
前記杭打機の運動状態及び姿勢変化を計測する慣性計測装置と、
前記杭打機の重心位置を含む設計情報を記憶する記憶部と、
前記慣性計測装置で取得した計測情報及び前記設計情報に基づいて転倒モーメントを算出し、前記杭打機が転倒するおそれの有無を判定する転倒判定部と、
前記転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部と、を有していることを特徴とする杭打機の制御装置。
続きを表示(約 660 文字)
【請求項2】
左右一対のクローラを備えた下部走行体及び該下部走行体の上部に旋回可能に設けられた上部旋回体からなるベースマシンと、前記上部旋回体の前部に起伏可能に設けられたリーダと、該リーダを前記上部旋回体の後部から支持する左右一対のバックステーと、前記リーダの前面に沿って昇降可能に設けられたオーガとを備え、
前記上部旋回体に前記下部走行体を走行させる操作がなされる運転室が設置され、該運転室に設けられた走行操作装置の操作を受けて前記下部走行体の走行を制御する杭打機の制御装置において、
前記杭打機の運動状態及び姿勢変化を計測する慣性計測装置と、
前記杭打機の重心位置を含む設計情報を記憶する記憶部と、
前記慣性計測装置で取得した計測情報及び前記設計情報に基づいて前記クローラの接地反力を算出し、前記杭打機が転倒するおそれの有無を判定する転倒判定部と、
前記転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部と、を有していることを特徴とする杭打機の制御装置。
【請求項3】
前記慣性計測装置は、前記下部走行体に設けられていることを特徴とする請求項1又は2記載の杭打機の制御装置。
【請求項4】
前記転倒判定部により転倒のおそれ有りと判定された場合に前記左右一対のクローラを異なる向きあるいは異なる速度で駆動して旋回走行させる走行制御部を有していることを特徴とする請求項1又は2記載の杭打機の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、杭打機の制御装置に関し、詳しくは、大型杭打機の転倒防止対策として、転倒判定に基づいて警告を発する杭打機の制御装置に関する。
続きを表示(約 2,600 文字)
【背景技術】
【0002】
杭打機は、安定度を5度以上確保することが法令で定められているが、転倒角度を実測して確認するのが困難であるから、計算で求めた安定度の使用が認められている。転倒角度は、杭打機全体の重心と走行体の接地端で作られる転倒支点との位置関係から求められ、通常は、杭打機の前方への転倒角度が最も小さな角度となる。したがって、設計上、前方への転倒角度が5度未満である場合には、安定度が不足しているものと判断できる(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2010-185204号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上述のような安定度計算は、走行や振動を何ら考慮しない静的状態でなされる計算方法である。しかし、実際は、杭打機に作用する加速度(並進加速度、遠心加速度、上下振動加速度など)によって慣性力の影響が現れ、特に、重心位置が高く、重量がある大型杭打機では、たとえ安定度を満足する傾斜姿勢でも、運転動作の停止状態や発進状態から傾斜が進行して転倒に至るおそれがある。
【0005】
そこで本発明は、杭打機の運転状態に応じた最適時に転倒警告を発することが可能な制御装置を提供することを目的としている。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の杭打機の制御装置は、左右一対のクローラを備えた下部走行体及び該下部走行体の上部に旋回可能に設けられた上部旋回体からなるベースマシンと、前記上部旋回体の前部に起伏可能に設けられたリーダと、該リーダを前記上部旋回体の後部から支持する左右一対のバックステーと、前記リーダの前面に沿って昇降可能に設けられたオーガとを備え、前記上部旋回体に前記下部走行体を走行させる操作がなされる運転室が設置され、該運転室に設けられた走行操作装置の操作を受けて前記下部走行体の走行を制御する杭打機の制御装置において、前記杭打機の運動状態及び姿勢変化を計測する慣性計測装置と、前記杭打機の重心位置を含む設計情報を記憶する記憶部と、前記慣性計測装置で取得した計測情報及び前記設計情報に基づいて転倒モーメントを算出し、前記杭打機が転倒するおそれの有無を判定する転倒判定部と、前記転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部と、を有していることを特徴としている。
【0007】
また、左右一対のクローラを備えた下部走行体及び該下部走行体の上部に旋回可能に設けられた上部旋回体からなるベースマシンと、前記上部旋回体の前部に起伏可能に設けられたリーダと、該リーダを前記上部旋回体の後部から支持する左右一対のバックステーと、前記リーダの前面に沿って昇降可能に設けられたオーガとを備え、前記上部旋回体に前記下部走行体を走行させる操作がなされる運転室が設置され、該運転室に設けられた走行操作装置の操作を受けて前記下部走行体の走行を制御する杭打機の制御装置において、前記杭打機の運動状態及び姿勢変化を計測する慣性計測装置と、前記杭打機の重心位置を含む設計情報を記憶する記憶部と、前記慣性計測装置で取得した計測情報及び前記設計情報に基づいて前記クローラの接地反力を算出し、前記杭打機が転倒するおそれの有無を判定する転倒判定部と、前記転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部と、を有していることを特徴としている。
【0008】
さらに、前記慣性計測装置は、前記下部走行体に設けられていることを特徴としている。加えて、前記転倒判定部により転倒のおそれ有りと判定された場合に前記左右一対のクローラを異なる向きあるいは異なる速度で駆動して旋回走行させる走行制御部を有していることを特徴としている。
【発明の効果】
【0009】
本発明の杭打機の制御装置によれば、慣性計測装置で取得した計測情報を転倒判定のための条件として用いる転倒判定部と、該転倒判定部により転倒のおそれ有りと判定された場合に転倒警告を発生させる警告発生部とを有しているので、下部走行体の急加速あるいは急減速などに起因した慣性力の影響を考慮して転倒判定を精度よく行うことができる。すなわち、杭打機の運転状態に応じた最適時に転倒警告を発することが可能となり、特に、重心位置が高く、重量がある大型杭打機の安全な運用に資するものとなる。また、転倒するおそれがある場面とそうでない場面との切り分けを明確にして転倒判定を行えることから、従来では抑えていた走行系の能力を最大限発揮した状態で、目的地へと杭打機を迅速かつ安全に移動させることができる。
【図面の簡単な説明】
【0010】
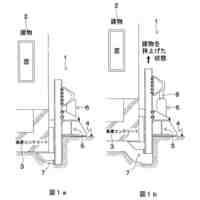
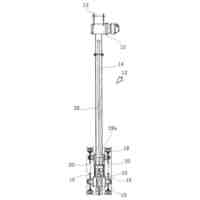
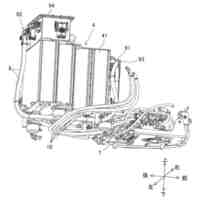
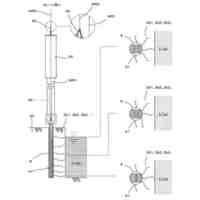
本発明の杭打機の制御装置を適用した一形態例を示す杭打機の側面図である。
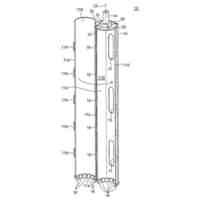
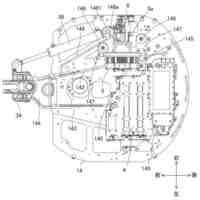
同じく杭打機の要部側面図である。
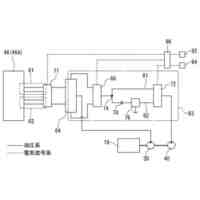
同じく杭打機の制御装置の構成図である。
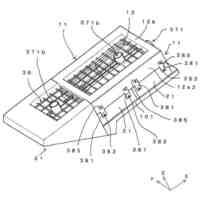
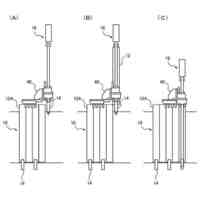
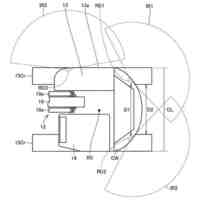
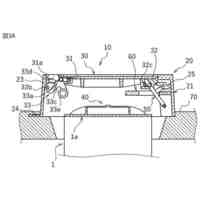
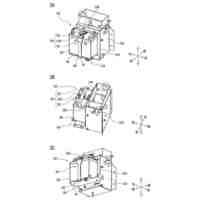
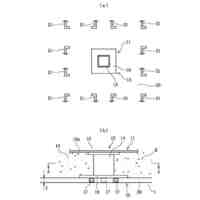
同じく慣性計測装置の設置構造を示す図である。
同じく慣性計測装置の設置構造の変形例を示す図である。
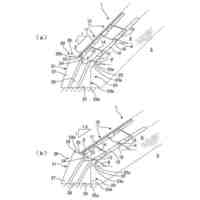
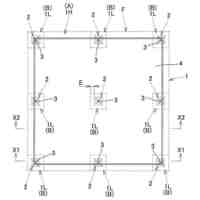
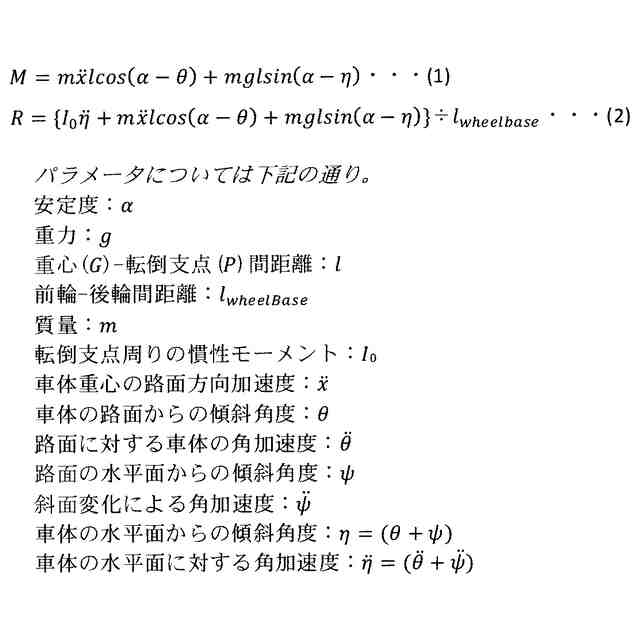
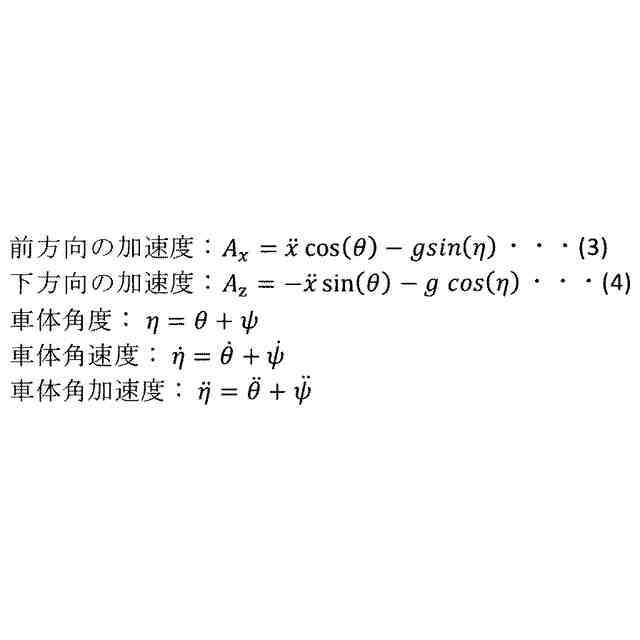
同じく転倒モーメント及びクローラの接地反力を算出するための計算モデルを示す図である。
同じく慣性計測装置を転倒支点に設置した場合における転倒モーメント及びクローラの接地反力を算出するための計算モデルを示す図である。
同じく計算モデルの要部拡大図である。
同じく慣性計測装置の設置位置の変更に応じて転倒モーメント及びクローラの接地反力を算出するための計算モデルを示す図である。
同じく転倒判定方法(モーメント判定処理)のフローチャートである。
同じく転倒判定方法(反力判定処理)のフローチャートである。
同じく警告表示の表示画面を示す図である。
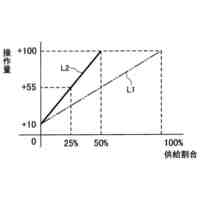
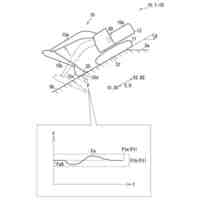
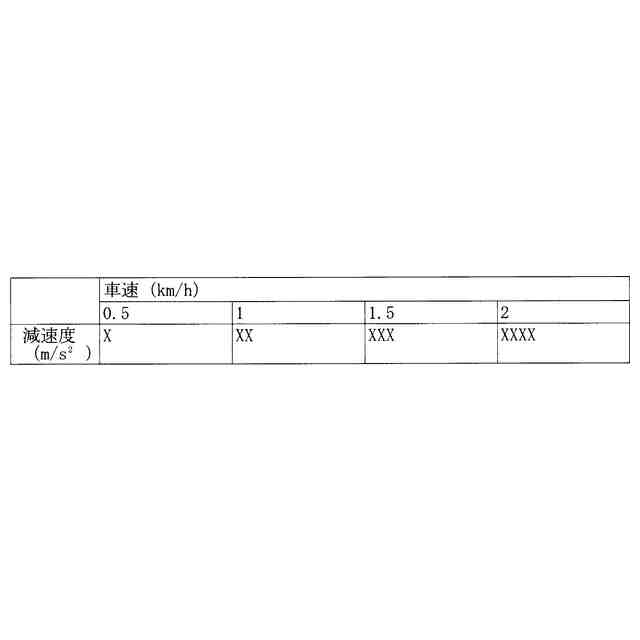
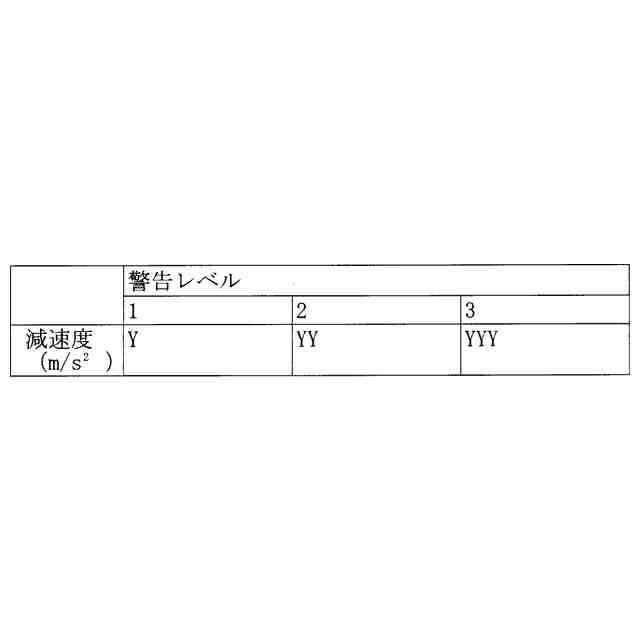
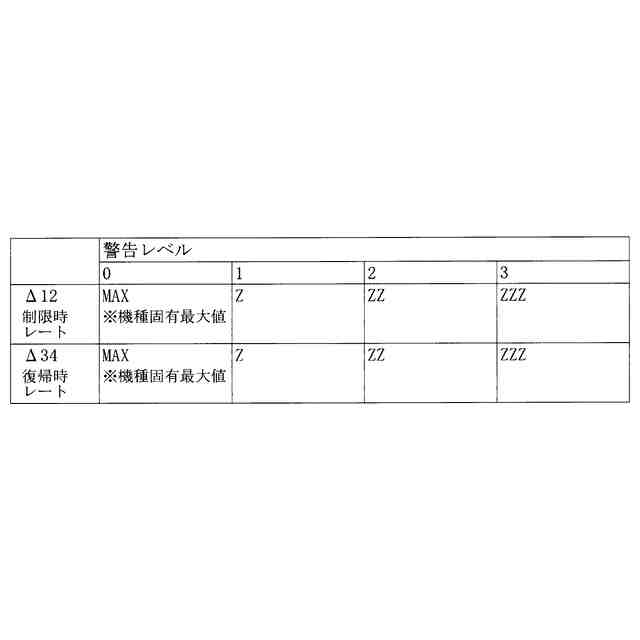
同じくトラクションコントロール機能(走行駆動制御)における制御値と時間との関係を示すグラフである。
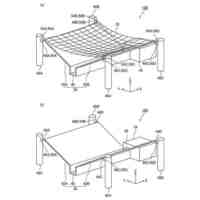
同じく転倒回避機能(旋回走行駆動制御)の説明図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社高橋監理
不同沈下修正機
5日前
個人
潜水式土運船と土砂降ろし方法
5日前
カナデビア株式会社
サクション基礎
5日前
大和クレス株式会社
斜樋管保護部材
13日前
ジーネットワーク株式会社
二重管CFT合成杭
20日前
株式会社オーイケ
擁壁および基礎ブロック
5日前
日本国土開発株式会社
堆積物移動装置
12日前
五洋建設株式会社
鋼管矢板の接合方法
19日前
株式会社技研製作所
杭の定着方法
20日前
コベルコ建機株式会社
作業機械
12日前
株式会社小松製作所
作業機械
12日前
日本車輌製造株式会社
杭打機の制御システム
12日前
株式会社大林組
ベントナイト砕石の締固め管理方法
20日前
アロン化成株式会社
排水設備用蓋
5日前
株式会社宮本組
大深度掘削機の作業支援システム
26日前
株式会社大林組
施工支援システム及び施工支援方法
20日前
株式会社鴻池組
地盤締固め工法
13日前
株式会社竹中土木
堤体補強構造
20日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
20日前
株式会社大林組
構真柱の構築方法
12日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
26日前
コベルコ建機株式会社
作業機械走行システム
19日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
20日前
株式会社サン・エンジニア
地盤改良機
13日前
株式会社竹内製作所
作業用車両
21日前
株式会社竹内製作所
作業用車両
21日前
大和ハウス工業株式会社
杭引き抜き治具
5日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
19日前
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
19日前
ヤンマーホールディングス株式会社
作業機械
12日前
ヤンマーホールディングス株式会社
作業機械
12日前
JFEシビル株式会社
柱と杭との接合構造
5日前
弘和産業株式会社
ケーシング用パッカー
26日前
株式会社神島組
割岩装置および当該割岩装置への潤滑剤供給方法
19日前
株式会社タケウチ建設
建築物の基礎補強構造
6日前
中国海洋大学
海底横方向探査導入装置及び導入方法
27日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ