TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025021562
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023125347
出願日
2023-08-01
発明の名称
作業機械
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
9/20 20060101AFI20250206BHJP(水工;基礎;土砂の移送)
要約
【課題】異常時の対応動作によって自動運転による作業効果が減少するのを抑制することが可能な作業機械を提供する。
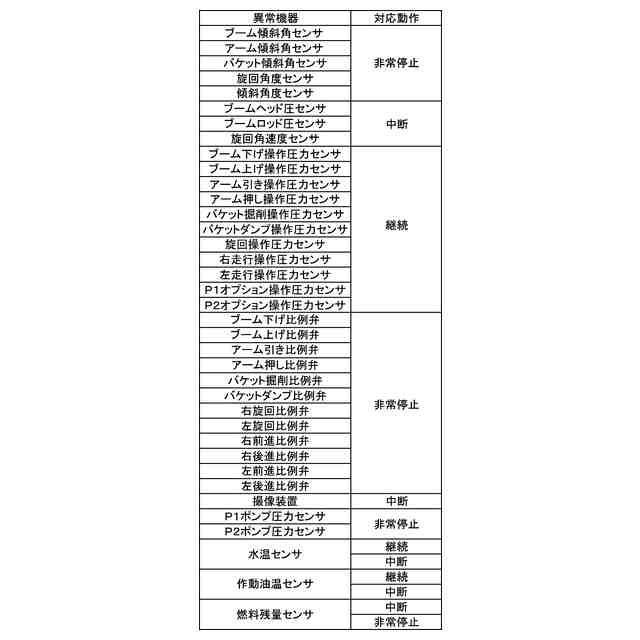
【解決手段】作業機械1の異常状態を検出する検出手段と、検出手段が検出した異常状態のレベルに応じた対応動作を作業機械1に行わせる制御手段と、を有する。対応動作は、自動運転を即時に停止させる非常停止動作と、自動運転を継続させる継続動作と、を含む。
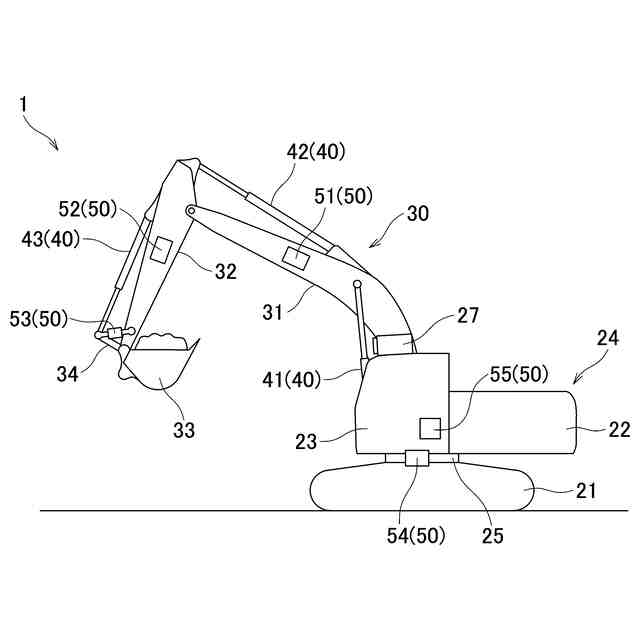
【選択図】図1
特許請求の範囲
【請求項1】
自動運転される作業機械であって、
前記作業機械の異常状態を検出する検出手段と、
前記検出手段が検出した前記異常状態のレベルに応じた対応動作を前記作業機械に行わせる制御手段と、
を有し、
前記対応動作は、
自動運転を即時に停止させる非常停止動作と、
自動運転を継続させる継続動作と、
を含むことを特徴とする作業機械。
続きを表示(約 1,000 文字)
【請求項2】
前記対応動作は、
前記作業機械の姿勢を自動運転の終了時の姿勢である終了姿勢にした後に、自動運転を停止させる中断動作を含むことを特徴とする請求項1に記載の作業機械。
【請求項3】
前記制御手段は、前記中断動作において、前記作業機械に所定の作業を行わせた後に、前記作業機械の姿勢を前記終了姿勢にして、自動運転を停止させることを特徴とする請求項2に記載の作業機械。
【請求項4】
前記制御手段は、前記中断動作において、所定の条件が成立するまで、前記作業機械に前記所定の作業を行わせることを特徴とする請求項3に記載の作業機械。
【請求項5】
前記所定の条件は、自動運転により次回に行われる予定の1回の作業量が、自動運転の目標作業量の残りの作業量よりも大きいことであることを特徴とする請求項4に記載の作業機械。
【請求項6】
前記所定の条件は、自動運転により行われた1回の作業量が一定量以下になったことであることを特徴とする請求項4に記載の作業機械。
【請求項7】
前記制御手段は、
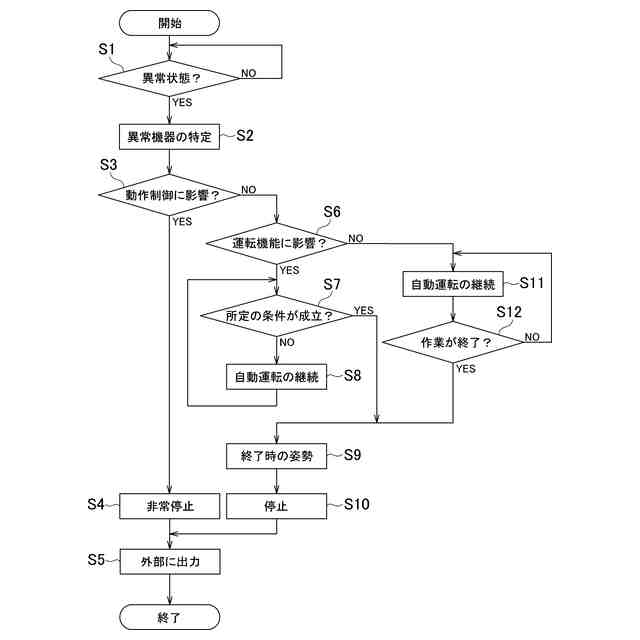
前記異常状態が自動運転の動作制御に影響するレベルである場合に、前記非常停止動作を前記作業機械に行わせ、
前記異常状態が自動運転の動作制御に影響しないレベルであるが、自動運転の運転機能に影響するレベルである場合に、前記中断動作を前記作業機械に行わせ、
前記異常状態が自動運転の動作制御および運転機能に影響しないレベルである場合に、前記継続動作を前記作業機械に行わせることを特徴とする請求項2に記載の作業機械。
【請求項8】
前記制御手段は、前記検出手段が検出した前記異常状態が所定の状態である場合に、所定の条件に応じて、前記継続動作と前記中断動作のどちらかを前記作業機械に行わせることを特徴とする請求項2に記載の作業機械。
【請求項9】
前記制御手段は、前記継続動作を前記作業機械に行わせる場合に、前記作業機械の動作速度を低下させることを特徴とする請求項8に記載の作業機械。
【請求項10】
前記制御手段は、前記検出手段が検出した前記異常状態が所定の状態である場合に、所定の条件に応じて、前記非常停止動作と前記中断動作のどちらかを前記作業機械に行わせることを特徴とする請求項2に記載の作業機械。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転される作業機械に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、自動運転される作業機械が異常状態になった際に、異常時の対応動作を作業機械に行わせることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2000-186349号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、異常時の対応動作として、作業機械の自動運転を即座に停止させた場合、停止した作業機械の姿勢を復旧させる作業を行う必要がある。また、作業が中断されることで、所定の作業量を稼ぐことができなくなる。このような場合、自動運転による作業効果が減少する。
【0005】
本発明の目的は、異常時の対応動作によって自動運転による作業効果が減少するのを抑制することが可能な作業機械を提供することである。
【課題を解決するための手段】
【0006】
本発明は、自動運転される作業機械であって、前記作業機械の異常状態を検出する検出手段と、前記検出手段が検出した前記異常状態のレベルに応じた対応動作を前記作業機械に行わせる制御手段と、を有し、前記対応動作は、自動運転を即時に停止させる非常停止動作と、自動運転を継続させる継続動作と、を含むことを特徴とする。
【発明の効果】
【0007】
本発明によると、検出手段が検出した異常状態のレベルに応じた対応動作が作業機械において行われる。この対応動作は、自動運転を即時に停止させる非常停止動作と、自動運転を継続させる継続動作と、を含む。異常状態が検出されても、その対応動作として継続動作が行われた場合、自動運転が継続される。これにより、自動運転による作業効果の減少を最小限に留めることができる。よって、異常時の対応動作によって自動運転による作業効果が減少するのを抑制することができる。
【図面の簡単な説明】
【0008】
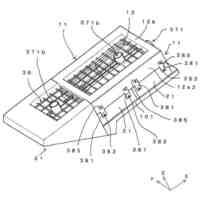
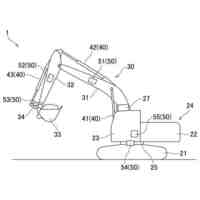
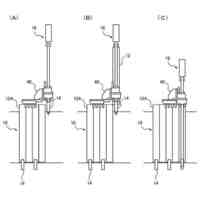
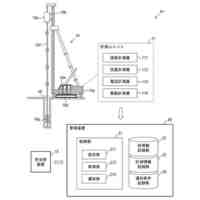
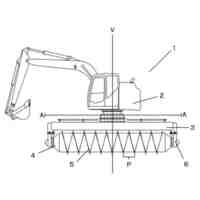
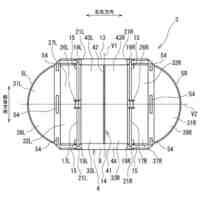
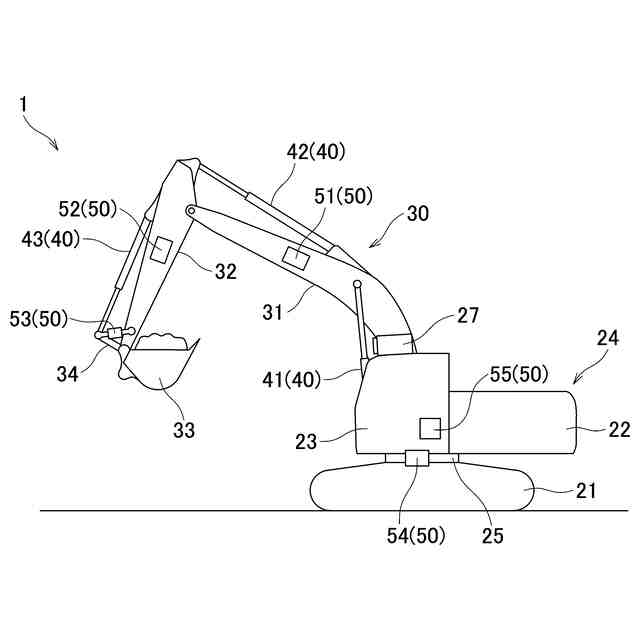
作業機械の側面図である。
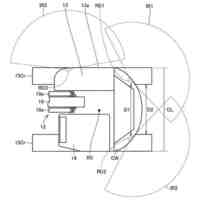
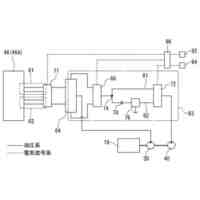
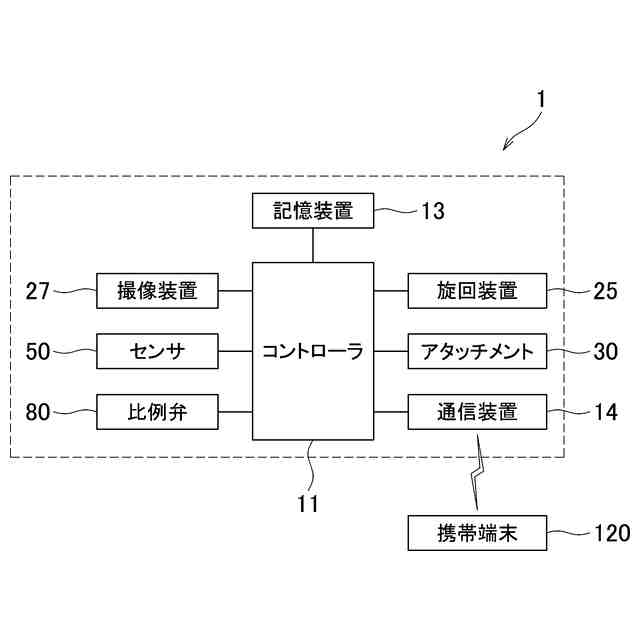
作業機械の回路構成を示す図である。
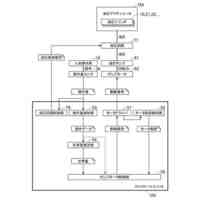
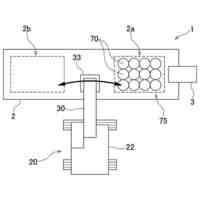
作業機械の機能構成図である。
異常対応処理のフローチャートである。
ペイロード機能異常対応処理のフローチャートである。
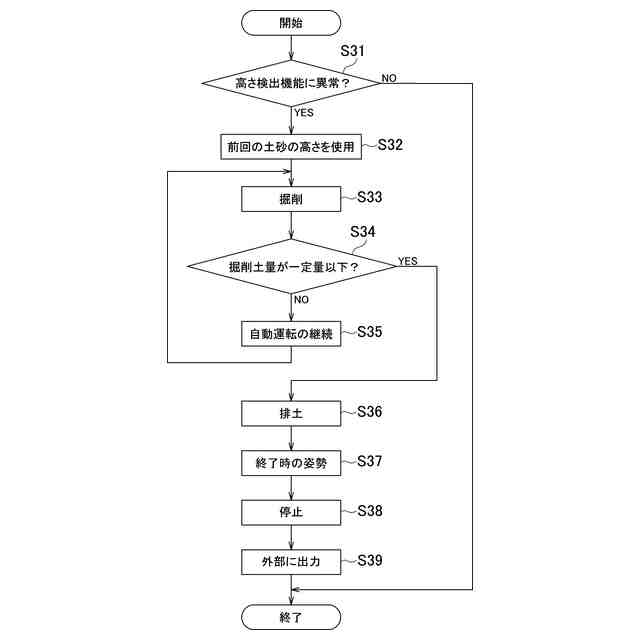
高さ検出機能異常対応処理のフローチャートである。
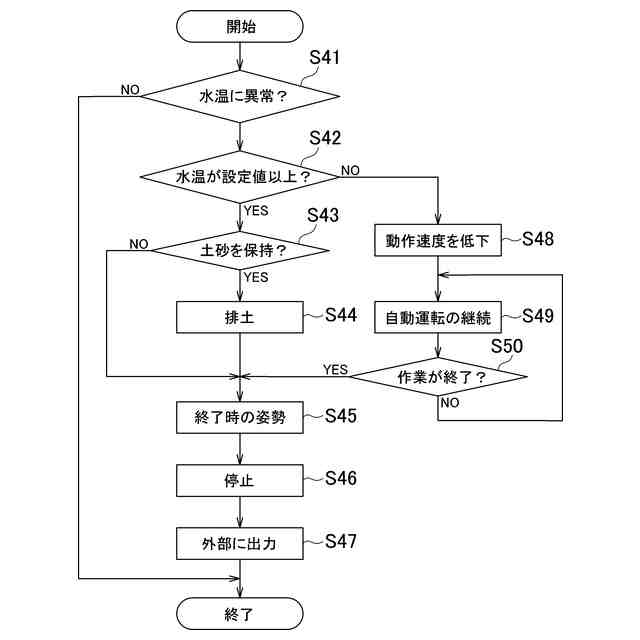
水温異常の異常対応処理のフローチャートである。
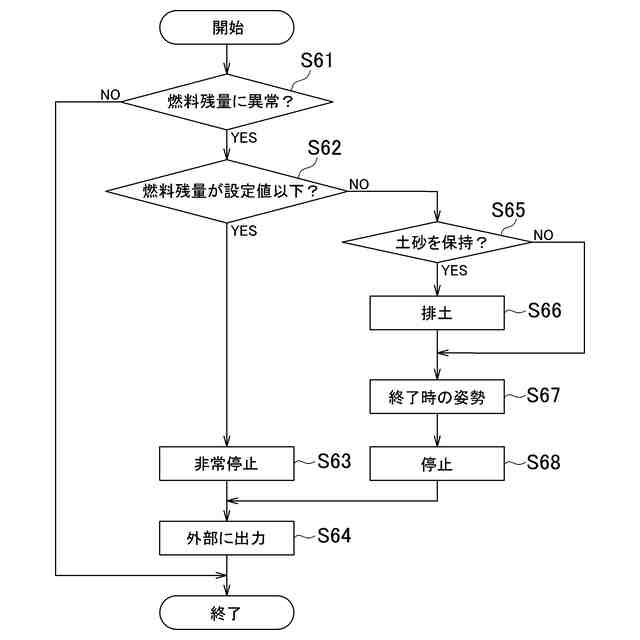
燃料残量異常の異常対応処理のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
(作業機械の構成)
本実施形態による作業機械は、自動運転される。作業機械1の側面図である図1に示すように、作業機械1は、アタッチメント30で作業を行う機械であり、例えば油圧ショベルである。作業機械1は、下部走行体21と上部旋回体22とを備えた機械本体24と、アタッチメント30と、シリンダ40と、を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大和クレス株式会社
斜樋管保護部材
6日前
株式会社クボタ
作業機
26日前
鹿島建設株式会社
漂流物の捕捉構造
26日前
ジーネットワーク株式会社
二重管CFT合成杭
13日前
日本車輌製造株式会社
アースドリル
20日前
日本植生株式会社
緑化土嚢袋
26日前
五洋建設株式会社
鋼管矢板の接合方法
12日前
有限会社 櫂設計事務所
掘削・撹拌具
26日前
日本国土開発株式会社
堆積物移動装置
5日前
日之出水道機器株式会社
地下構造物用蓋
26日前
コベルコ建機株式会社
作業機械
5日前
株式会社技研製作所
杭の定着方法
13日前
日本車輌製造株式会社
杭打機の制御システム
5日前
コベルコ建機株式会社
作業システム
26日前
株式会社小松製作所
作業機械
5日前
個人
ローラー転圧装置を備えた油圧ショベル
20日前
株式会社大林組
ベントナイト砕石の締固め管理方法
13日前
井関農機株式会社
作業車両
27日前
株式会社宮本組
大深度掘削機の作業支援システム
19日前
株式会社竹中土木
堤体補強構造
13日前
株式会社鴻池組
地盤締固め工法
6日前
株式会社大林組
施工支援システム及び施工支援方法
13日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
13日前
株式会社大林組
構真柱の構築方法
5日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
19日前
コベルコ建機株式会社
作業機械走行システム
12日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
13日前
株式会社高知丸高
水陸両用浚渫機
20日前
株式会社サン・エンジニア
地盤改良機
6日前
東洋建設株式会社
捨石投入装置
26日前
株式会社竹内製作所
作業用車両
14日前
株式会社竹内製作所
作業用車両
14日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
12日前
東京電力ホールディングス株式会社
水中沈殿物回収システム
26日前
東京応化工業株式会社
構造体、及び海洋生物の付着防止方法
26日前
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ