TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025022238
公報種別
公開特許公報(A)
公開日
2025-02-14
出願番号
2023126650
出願日
2023-08-02
発明の名称
杭打機の制御システム
出願人
日本車輌製造株式会社
代理人
個人
,
個人
主分類
E02D
13/04 20060101AFI20250206BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータの運転操作に配慮した移動量が得られ、杭芯位置への終末誘導を容易に行うことが可能な杭打機の制御システムを提供する。
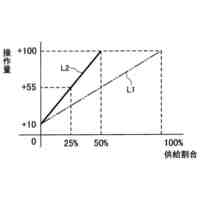
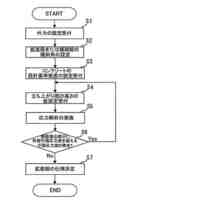
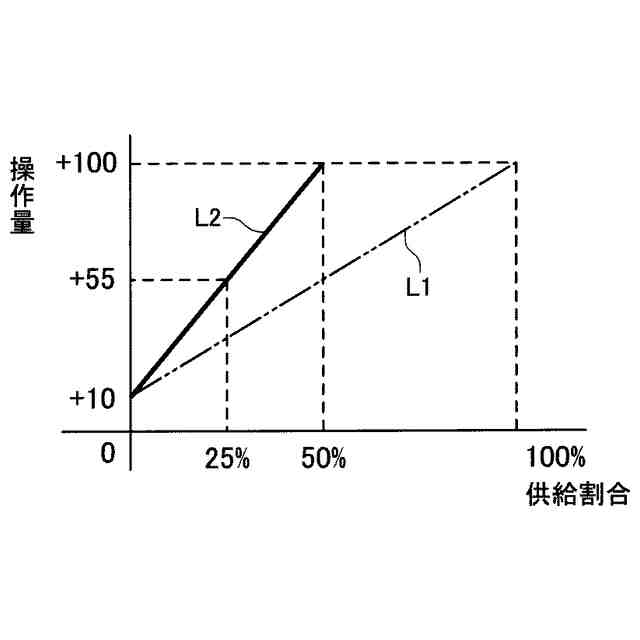
【解決手段】コントローラは、杭の埋設予定位置と、杭打機の位置情報から求まる実杭芯位置との間の距離があらかじめ設定した閾値を下回ったときに、2次元地図上の表示から杭の埋設予定位置及び実杭芯位置を含む周辺領域を拡大した終末誘導表示に切り替えるとともに、油圧ユニットに対して制御指令を与え、所定の流量特性(実線のグラフ線L2で表した流量特性)に基づいて、走行及び旋回に対応する流量制御バルブの作動油流通量を調節することで、下部走行体の走行速度を走行操作レバーの操作量に応じた第1走行速度よりも低速である第2走行速度に制御し、かつ、上部旋回体の旋回速度を旋回操作レバーの操作量に応じた第1旋回速度よりも低速である第2旋回速度に制御する。
【選択図】図7
特許請求の範囲
【請求項1】
下部走行体上に上部旋回体を備えた杭打機の位置情報を取得する受信部と、施工現場における杭の埋設予定位置を設定した施工計画情報を記憶する記憶部と、運転操作レバーの傾動操作に基づいて前記杭打機の移動方向及び移動速度を設定する操作部と、前記杭打機の運転状態を表示する表示部と、前記杭打機の動作を制御するコントローラとを備えた杭打機の制御システムにおいて、
前記コントローラは、前記受信部が取得した位置情報及び前記記憶部が記憶した施工計画情報を使用して前記表示部に杭芯誘導画面を表示させる制御を行うにあたって、前記杭の埋設予定位置と前記杭打機の現在位置とを2次元地図上に表示させ、前記杭の埋設予定位置と、前記杭打機の位置情報から求まる実杭芯位置との間の距離があらかじめ設定した閾値を下回ったときに、前記2次元地図上の表示から前記杭の埋設予定位置及び前記実杭芯位置を含む周辺領域を拡大した終末誘導表示に切り替えるとともに、前記下部走行体の走行速度を走行操作レバーの操作量に応じた第1走行速度よりも低速である第2走行速度に制御し、かつ、前記上部旋回体の旋回速度を旋回操作レバーの操作量に応じた第1旋回速度よりも低速である第2旋回速度に制御することを特徴とする制御システム。
続きを表示(約 78 文字)
【請求項2】
前記第2走行速度及び前記第2旋回速度に制御された状態を報知する報知部を備えていることを特徴とする請求項1記載の制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、杭打機の制御システムに関し、詳しくは、施工の一部の動作を支援する機能を備えた杭打機の制御システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来から、鋼管杭の埋設や地盤改良などが行われる施工現場では、あらかじめ測量によって施工位置となる杭芯(杭の中心軸)位置を決定しておき、施工時に、杭打機などの建設機械がオペレータの運転操作によって杭芯位置へ移動される。この杭芯位置合わせは、一般に、左右のクローラで構成した下部走行体を走行させ、あるいは、下部走行体に対して上部旋回体を旋回させて杭打機の位置及び方向が調整される(例えば、特許文献1参照)。
【0003】
近年では、建設工事現場における施工のIT化が進み、杭芯位置合わせにおいても、専用のシステムが開発され、運用に至っている。建設機械のオペレータは、視覚的に表示された誘導画面に従うことで、現在位置と目標位置との関係をイメージしながら、円滑な運転操作が行えるようになっている(例えば、特許文献2参照)。
【先行技術文献】
【特許文献】
【0004】
特開2011-6880号公報
特開2021-165502号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献2に記載された施工位置誘導システムは、杭の埋設予定位置と杭打機の車体位置情報から求まる実杭芯位置との関係をアイコンやガイドラインの表示によって視覚的に把握することができる。しかしながら、杭芯位置合わせの運転操作は、走行と旋回の複合操作が行われるところ、微少な移動量が求められる終末誘導時には、力みや緊張などから、移動に必要なレバー操作の操作量に対して実際の操作量が過大になりやすく、終末誘導を難しいものにしていた。
【0006】
そこで本発明は、オペレータの運転操作に配慮した移動量が得られ、杭芯位置への終末誘導を容易に行うことが可能な杭打機の制御システムを提供することを目的としている。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明の杭打機の制御システムは、下部走行体上に上部旋回体を備えた杭打機の位置情報を取得する受信部と、施工現場における杭の埋設予定位置を設定した施工計画情報を記憶する記憶部と、運転操作レバーの傾動操作に基づいて前記杭打機の移動方向及び移動速度を設定する操作部と、前記杭打機の運転状態を表示する表示部と、前記杭打機の動作を制御するコントローラとを備えた杭打機の制御システムにおいて、前記コントローラは、前記受信部が取得した位置情報及び前記記憶部が記憶した施工計画情報を使用して前記表示部に杭芯誘導画面を表示させる制御を行うにあたって、前記杭の埋設予定位置と前記杭打機の現在位置とを2次元地図上に表示させ、前記杭の埋設予定位置と、前記杭打機の位置情報から求まる実杭芯位置との間の距離があらかじめ設定した閾値を下回ったときに、前記2次元地図上の表示から前記杭の埋設予定位置及び前記実杭芯位置を含む周辺領域を拡大した終末誘導表示に切り替えるとともに、前記下部走行体の走行速度を走行操作レバーの操作量に応じた第1走行速度よりも低速である第2走行速度に制御し、かつ、前記上部旋回体の旋回速度を旋回操作レバーの操作量に応じた第1旋回速度よりも低速である第2旋回速度に制御することを特徴としている。
【0008】
また、前記第2走行速度及び前記第2旋回速度に制御された状態を報知する報知部を備えていることを特徴としている。
【発明の効果】
【0009】
本発明の杭打機の制御システムによれば、杭芯誘導画面を表示させる制御を行うにあたって、杭の埋設予定位置と実杭芯位置との間の距離が閾値を下回ったときに、2次元地図上の表示から終末誘導表示に切り替えるとともに、下部走行体の走行速度を走行操作レバーの操作量に応じた第1走行速度よりも低速である第2走行速度に制御し、かつ、上部旋回体の旋回速度を旋回操作レバーの操作量に応じた第1旋回速度よりも低速である第2旋回速度に制御するので、終末誘導時に求められる杭打機の微少な移動量が容易に得られ、杭芯位置合わせにおいて、運転操作性の向上に大きく寄与するものとなる。
【図面の簡単な説明】
【0010】
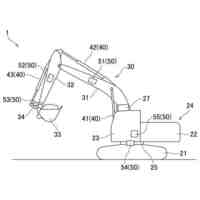
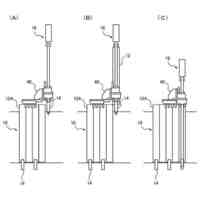
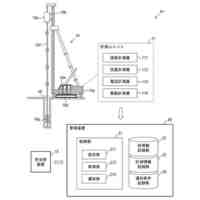
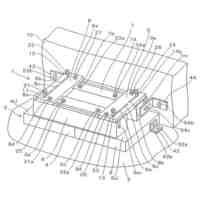
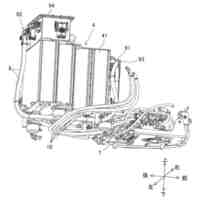
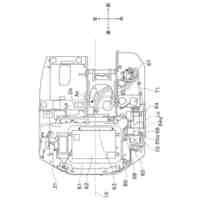
本発明の一形態例を示す制御システムが適用される杭打機の側面図である。
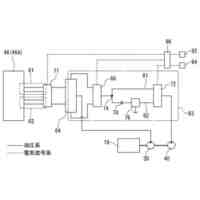
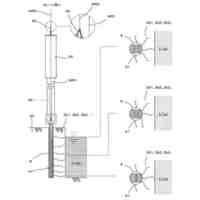
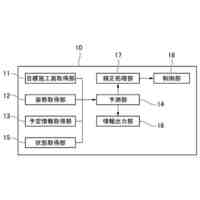
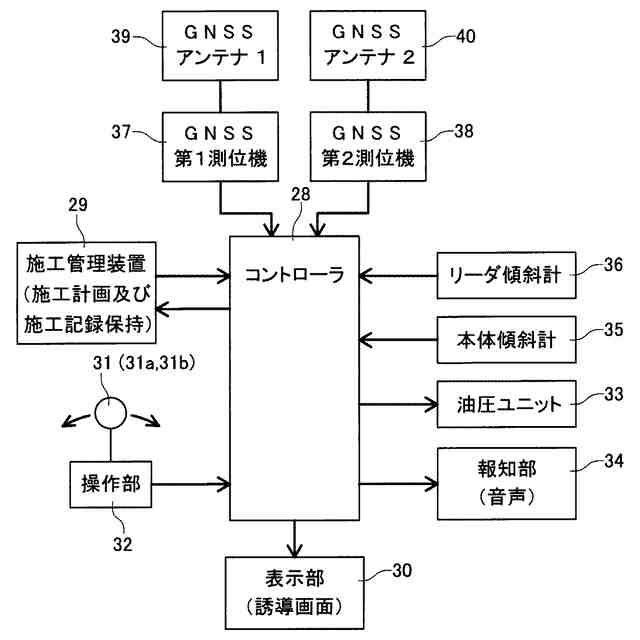
同じく制御システムの構成図である。
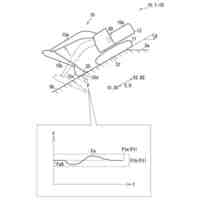
同じくレバー操作量と作動油供給割合との関係を示すグラフである。
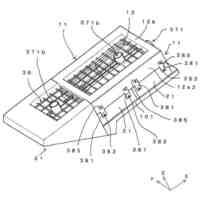
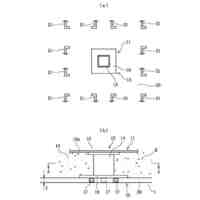
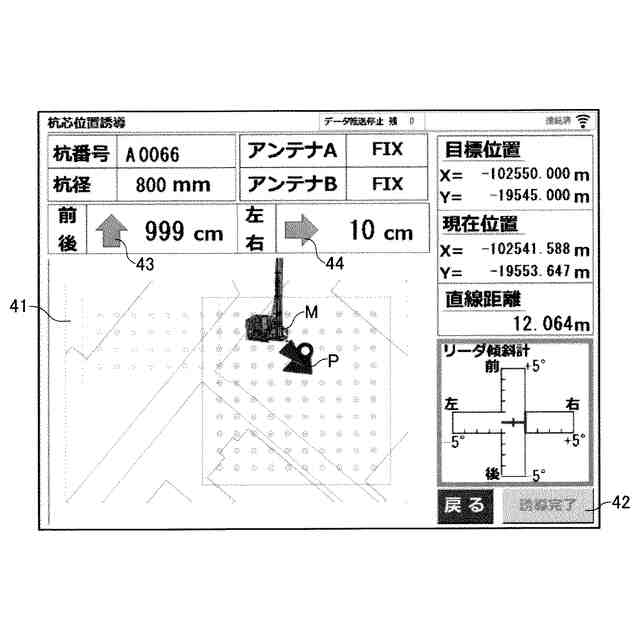
同じく杭芯誘導画面の一例として杭の埋設予定位置と杭打機の現在位置とを2次元地図上に表示した状態を示す図である。
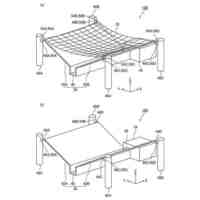
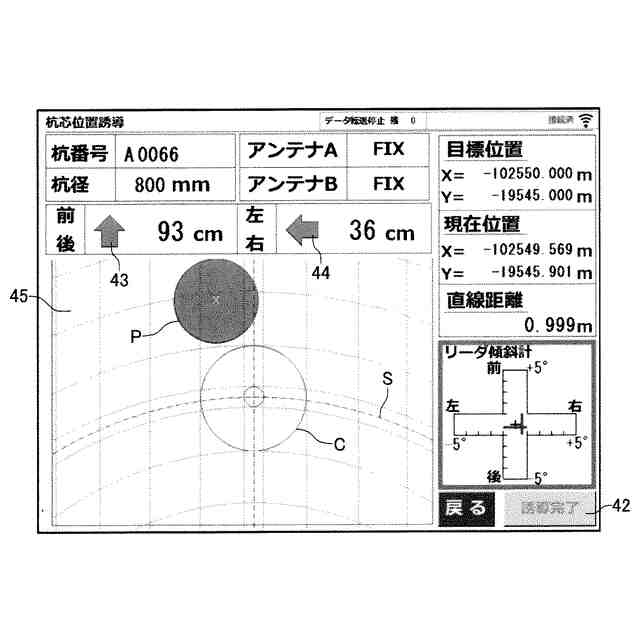
同じく終末誘導表示において杭の埋設予定位置に実杭芯位置を近づけていく途中の状態を示す説明図である。
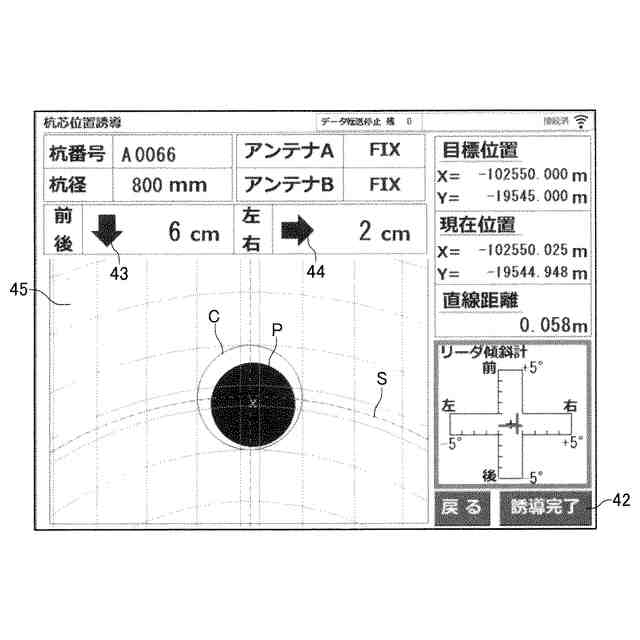
同じく終末誘導表示において杭の埋設予定位置と実杭芯位置との距離が管理基準以内になったときの状態を示す説明図である。
同じく終末誘導時のレバー操作量と作動油供給割合との関係を示すグラフである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
大和クレス株式会社
斜樋管保護部材
6日前
ジーネットワーク株式会社
二重管CFT合成杭
13日前
五洋建設株式会社
鋼管矢板の接合方法
12日前
日本国土開発株式会社
堆積物移動装置
5日前
コベルコ建機株式会社
作業機械
5日前
株式会社技研製作所
杭の定着方法
13日前
株式会社大林組
ベントナイト砕石の締固め管理方法
13日前
株式会社小松製作所
作業機械
5日前
日本車輌製造株式会社
杭打機の制御システム
5日前
株式会社宮本組
大深度掘削機の作業支援システム
19日前
株式会社鴻池組
地盤締固め工法
6日前
株式会社竹中土木
堤体補強構造
13日前
株式会社大林組
施工支援システム及び施工支援方法
13日前
コベルコ建機株式会社
作業機械走行システム
12日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
13日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
13日前
株式会社大林組
構真柱の構築方法
5日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
19日前
株式会社サン・エンジニア
地盤改良機
6日前
株式会社竹内製作所
作業用車両
14日前
株式会社竹内製作所
作業用車両
14日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
12日前
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
12日前
弘和産業株式会社
ケーシング用パッカー
19日前
ヤンマーホールディングス株式会社
作業機械
5日前
ヤンマーホールディングス株式会社
作業機械
5日前
株式会社小松製作所
電動式作業機械
20日前
株式会社小松製作所
電動式作業機械
20日前
株式会社神島組
割岩装置および当該割岩装置への潤滑剤供給方法
12日前
中国海洋大学
海底横方向探査導入装置及び導入方法
20日前
東亜建設工業株式会社
水上の上部工の構築方法
13日前
株式会社安藤・間
プレキャストコンクリート基礎梁構造
5日前
株式会社くりんか
法面保全工法及び法面保全工法用プログラム
5日前
個人
計算方法、計算装置及び計算プログラム
6日前
鹿島建設株式会社
設計方法、設計装置およびプログラム
13日前
コベルコ建機株式会社
情報処理装置、作業支援システム、及びプログラム
12日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ