TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025016267
公報種別
公開特許公報(A)
公開日
2025-01-31
出願番号
2023119423
出願日
2023-07-21
発明の名称
大深度掘削機の作業支援システム
出願人
株式会社宮本組
代理人
個人
,
個人
主分類
E02F
9/26 20060101AFI20250124BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータが適切に作業状況を把握できしかも利便性の高い大深度掘削機の作業支援システムを提供する。
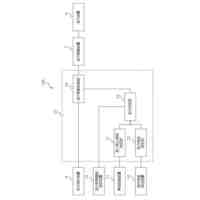
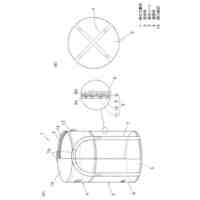
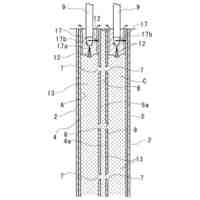
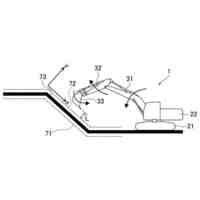
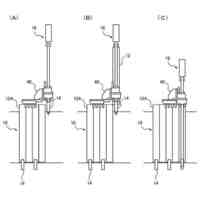
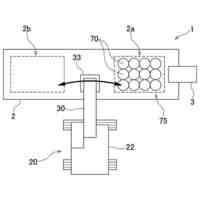
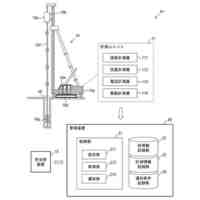
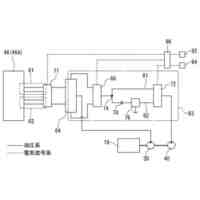
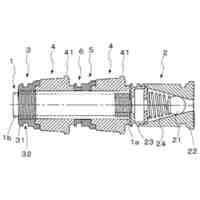
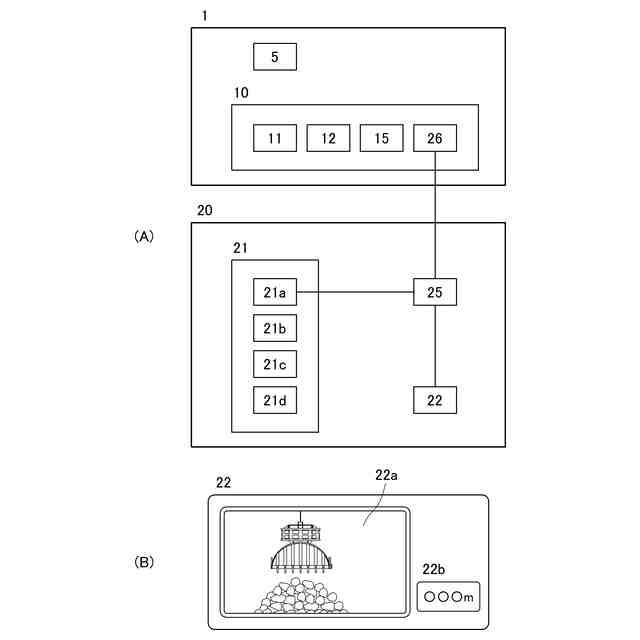
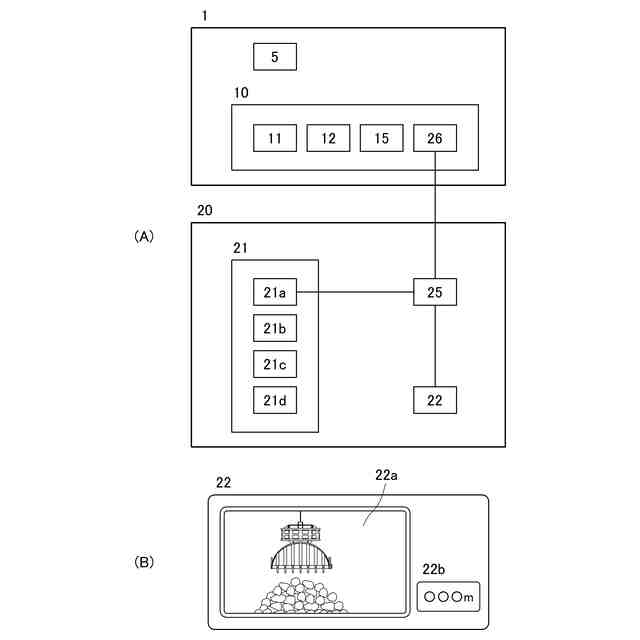
【解決手段】バケット10を備えた掘削機1により大深度の竪穴内を掘削する作業を支援するシステム20であって、竪穴D内に設置される撮影装置21と、撮影装置21が撮影した画像を表示する画像表示部22と、撮影装置21から撮影した画像の情報が供給され、画像表示部22に対して画像表示部22に表示する画像に関する情報を供給する制御部25と、を備えており、撮影装置21は、竪穴D内においてバケット10によって掘削される位置を撮影するように配置されている。バケット10によって掘削される位置を撮影装置21によって撮影すれば、オペレータが掘削状況を視認できるので、掘削機1による掘削作業を適切に行うためのサポートをすることができる。
【選択図】図1
特許請求の範囲
【請求項1】
バケットを備えた掘削機により大深度の竪穴内を掘削する作業を支援するシステムであって、
前記竪穴内に設置される撮影装置と、
該撮影装置が撮影した画像を表示する画像表示部と、
前記撮影装置から撮影した画像の情報が供給され、前記画像表示部に対して該画像表示部に表示する画像に関する情報を供給する制御部と、を備えており、
前記撮影装置は、
前記バケットによって掘削される位置を撮影するように竪穴内に配置されている
ことを特徴とする大深度掘削機の作業支援システム。
続きを表示(約 490 文字)
【請求項2】
前記撮影装置は、
前記竪穴内に一つ設けられており、該竪穴内において移動可能に設けられている
ことを特徴とする請求項1記載の大深度掘削機の作業支援システム。
【請求項3】
前記制御部は、
前記バケットに設けられた、該バケットより下方の距離を測定する距離測定装置を備えており、
該距離測定装置が測定した距離を、前記画像表示部または前記掘削機を操作する際に使用する操作画面に表示する機能を有している
ことを特徴とする請求項1記載の大深度掘削機の作業支援システム。
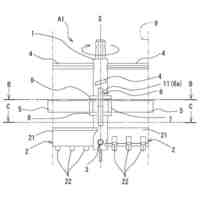
【請求項4】
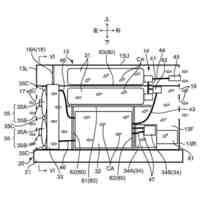
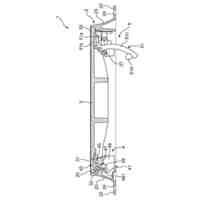
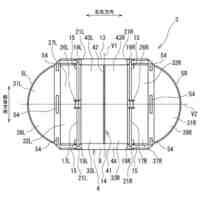
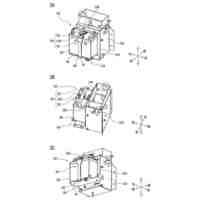
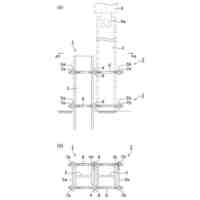
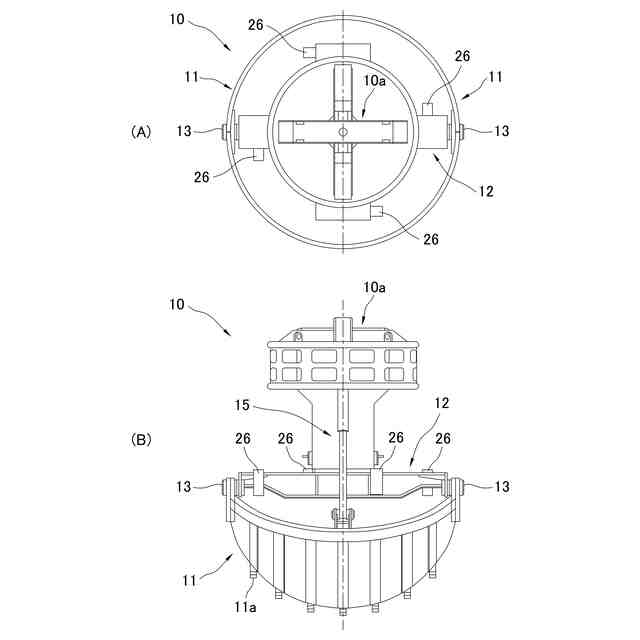
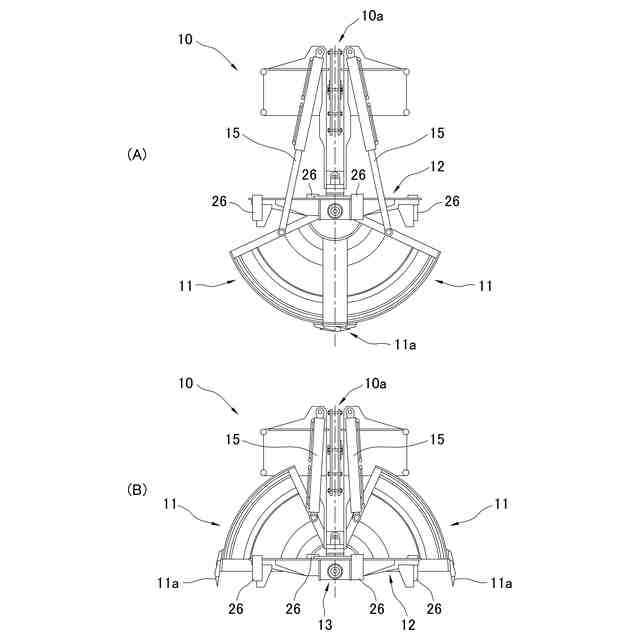
前記バケットは、
開閉する一対のシェルと、
該一対のシェルが揺動可能に設けられるフレームと、を備えており、
前記距離測定装置は、
前記フレームにおいて、前記一対のシェルが閉じている状態における該一対のシェルの上方に位置し、該一対のシェルが開くと該距離測定装置の下方から前記一対のシェルが退避する位置に設置されている
ことを特徴とする請求項3記載の大深度掘削機の作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、大深度掘削機の作業支援システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
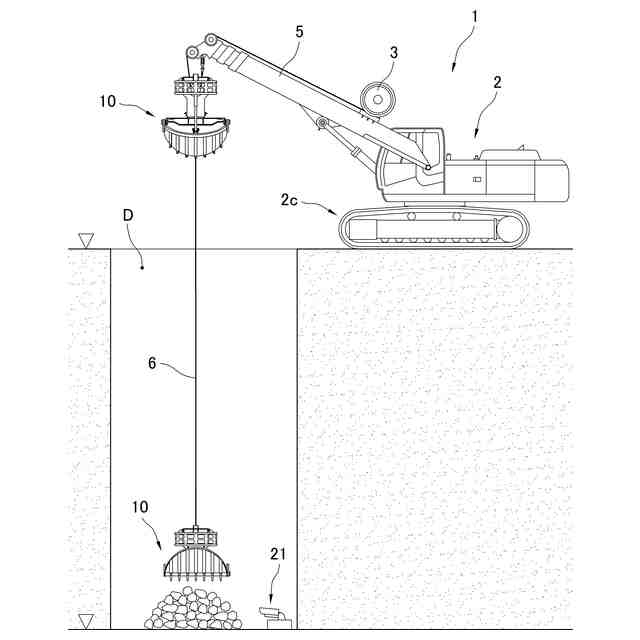
各種の土木・建設工事において、竪穴の掘削にはバケットを備えたクローラクレーン等の掘削機が使用される(特許文献1参照)。かかる掘削機による掘削では、竪穴に降下させたバケットにより掘削が行われるが、竪穴が深い場合には、掘削機のオペレータがバケットによる掘削状況を直接視認することができない。このため、オペレータはバケットを吊り下げるワイヤーの弛みやバケットの着地による衝撃等を体感することによりバケットの状況を把握している。つまり、オペレータの勘や経験に頼って掘削状況などを把握しており、掘削機の操作に熟練を要している。また、オペレータが掘削機の操作に熟練したとしても、オペレータは掘削状況を直接視認できないため、掘削を正確に行うことは困難である。
【0003】
オペレータが掘削状況を直接視認できない状況でも掘削を正確に行うために、特許文献2には、掘削機に取り付けた複数の各種センサからの信号により掘削状況を検出し、検出した掘削状況の情報をオペレータ室のディスプレイに視覚的に表示するようにした技術が開示されている。しかし、特許文献2では、クラブバケットの高さや掘削状態はセンサからの信号に基づいてオペレータが推定しているにすぎず、クラブバケットの高さや掘削状態をオペレータは正確に把握することはできない。
【0004】
一方、クレーン等のブームやフックにカメラを設けて、カメラで撮影した画像によってクレーン等のフックや吊荷の状態を確認し、作業状況や作業者に危険がないかなどを把握できるようにした技術が開示されている(特許文献3~5参照)。この技術のようにカメラで撮影した画像でクレーン等のフックや吊荷の状態等をオペレータが確認できれば、センサからの信号だけに基づく作業状況などの把握に比べて、オペレータが作業状況などを適切に把握できる。しかし、この技術でも、クレーン等のフックや吊荷を上方から撮影した画像しか得られないので、フックや吊荷等の地面等からの高さや地面等との関係性を適切に把握することは難しい。
【0005】
特許文献6には、クレーンのブームやフック以外の場所に設けられたカメラによって作業状況を撮影し、オペレータの操作画面にカメラで撮影した画像を提供する技術が開示されている。この技術では、据付カメラや、人が身に着けるウェアラブル端末に搭載されたカメラ、ドローン等に搭載されたカメラ等の複数のカメラによって作業状況を撮影することが開示されている。そして、クレーンの状態に応じて制御装置がオペレータの操作画面に表示する画像を切り換えて表示することや、クレーンの状態に応じて複数の画像を操作画面に表示する技術が開示されている。
【先行技術文献】
【特許文献】
【0006】
特開平7‐127371号公報
特開2001‐64993号公報
特開2022‐16497号公報
特開2022‐82974号公報
特開2022‐143224号公報
実用新案登録第3226637号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、特許文献6のように、クレーンの状態に応じて制御装置が複数の画像を切り換えて表示する場合、必ずしもオペレータが確認したい画像が制御装置によって選択されて操作画面に表示されるとは限られない。
また、操作画面に複数の画像が同時に表示されれば、その中にオペレータが見たい画像が含まれている可能性はあるが、オペレータは画像以外にも様々な計器やインジケータを確認しなければならず、複数の画像が表示されることは必ずしもオペレータの作業状況把握に役立つとは限らず、複数の画像が表示されることによってオペレータが誤った認識をする可能性もある。とくに、画像が多くなればなるほど、オペレータが誤った認識をする可能性は高くなる。
つまり、特許文献6の技術は、オペレータによるクレーンの作業状況把握を必ずしも十分にサポートするものとはいえず、クレーン等の作業において、オペレータが適切に作業状況を把握できしかも利便性の高い作業支援システムが求められている。
【0008】
本発明は上記事情に鑑み、オペレータが適切に作業状況を把握できしかも利便性の高い大深度掘削機の作業支援システムを提供することを目的とする。
【課題を解決するための手段】
【0009】
第1発明の大深度掘削機の作業支援システムは、バケットを備えた掘削機により大深度の竪穴内を掘削する作業を支援するシステムであって、前記竪穴内に設置される撮影装置と、該撮影装置が撮影した画像を表示する画像表示部と、前記撮影装置から撮影した画像の情報が供給され、前記画像表示部に対して該画像表示部に表示する画像に関する情報を供給する制御部と、を備えており、前記撮影装置は、前記バケットによって掘削される位置を撮影するように竪穴内に配置されていることを特徴とする。
第2発明の大深度掘削機の作業支援システムは、第1発明において、前記撮影装置は、前記竪穴内に一つ設けられており、該竪穴内において移動可能に設けられていることを特徴とする。
第3発明の大深度掘削機の作業支援システムは、第1発明において、前記制御部は、前記バケットに設けられた、該バケットより下方の距離を測定する距離測定装置を備えており、該距離測定装置が測定した距離を、前記画像表示部または前記掘削機を操作する際に使用する操作画面に表示する機能を有していることを特徴とする。
第4発明の大深度掘削機の作業支援システムは、第3発明において、前記バケットは、開閉する一対のシェルと、該一対のシェルが揺動可能に設けられるフレームと、を備えており、前記距離測定装置は、前記フレームにおいて、前記一対のシェルが閉じている状態における該一対のシェルの上方に位置し、該一対のシェルが開くと該距離測定装置の下方から前記一対のシェルが退避する位置に設置されていることを特徴とする。
【発明の効果】
【0010】
第1発明によれば、バケットによって掘削される位置を撮影装置によって撮影すれば、オペレータが掘削位置の掘削状況を視認できるので、掘削機による掘削作業を適切に行うためのサポートをすることができる。
第2発明によれば、撮影装置によって得られる画像が一つであるので、オペレータが掘削状況の状況を容易に把握できる。
第3、第4発明によれば、距離測定装置が測定した距離によってオペレータがバケットの位置を把握できる。すると、オペレータは必要なときだけ画像を確認すればよいので、オペレータの掘削機の操作や掘削状況確認が容易になる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社宮本組
大深度掘削機の作業支援システム
7日前
株式会社クボタ
作業機
14日前
鹿島建設株式会社
漂流物の捕捉構造
14日前
日立建機株式会社
作業機械
16日前
コベルコ建機株式会社
作業機械
18日前
ジーネットワーク株式会社
二重管CFT合成杭
1日前
日本車輌製造株式会社
アースドリル
8日前
日本植生株式会社
緑化土嚢袋
14日前
有限会社 櫂設計事務所
掘削・撹拌具
14日前
五洋建設株式会社
鋼管矢板の接合方法
今日
日之出水道機器株式会社
地下構造物用蓋
14日前
コベルコ建機株式会社
作業機械
15日前
株式会社技研製作所
杭の定着方法
1日前
株式会社大林組
ベントナイト砕石の締固め管理方法
1日前
個人
ローラー転圧装置を備えた油圧ショベル
8日前
コベルコ建機株式会社
作業システム
14日前
井関農機株式会社
作業車両
15日前
株式会社宮本組
大深度掘削機の作業支援システム
7日前
コベルコ建機株式会社
建設機械
17日前
株式会社竹中土木
堤体補強構造
1日前
株式会社大林組
施工支援システム及び施工支援方法
1日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
18日前
前田工繊株式会社
洗掘防止ユニットの撤去方法
1日前
スエヒロシステム株式会社
小型アンカ一体型ライナー
1日前
株式会社高知丸高
水陸両用浚渫機
8日前
株式会社SAICON
設備機器設置台及び設備機器設置構造
7日前
コベルコ建機株式会社
作業機械走行システム
今日
東洋建設株式会社
捨石投入装置
14日前
株式会社竹内製作所
作業用車両
2日前
株式会社竹内製作所
作業用車両
2日前
ジェコス株式会社
鋼材立付け用治具および鋼材の打設方法
18日前
東京電力ホールディングス株式会社
水中沈殿物回収システム
14日前
コベルコ建機株式会社
制御装置、建設機械、及びプログラム
今日
西武ポリマ化成株式会社
ハイブリッドケーソンの底版部構造
今日
東京応化工業株式会社
構造体、及び海洋生物の付着防止方法
14日前
弘和産業株式会社
ケーシング用パッカー
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ