TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025010551
公報種別
公開特許公報(A)
公開日
2025-01-22
出願番号
2021201164
出願日
2021-12-10
発明の名称
作業機械
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/24 20060101AFI20250115BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータの不注意や走行操作の誤りによる転倒を防止することが可能な作業機械を提供する。
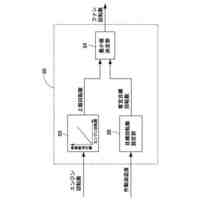
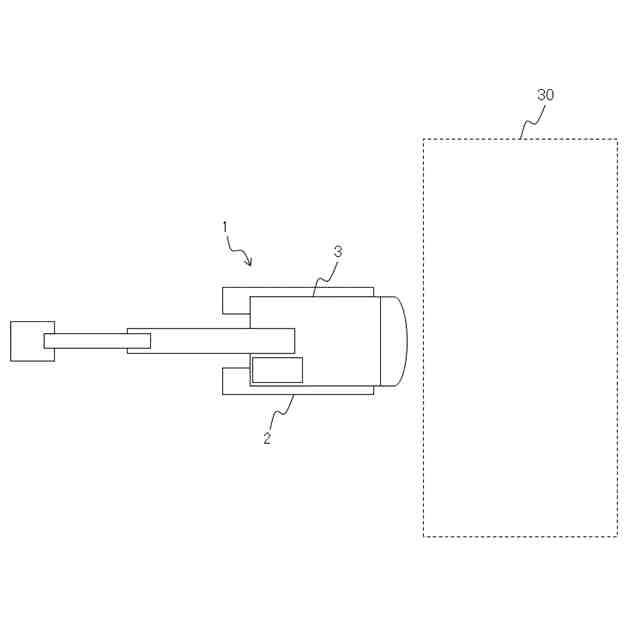
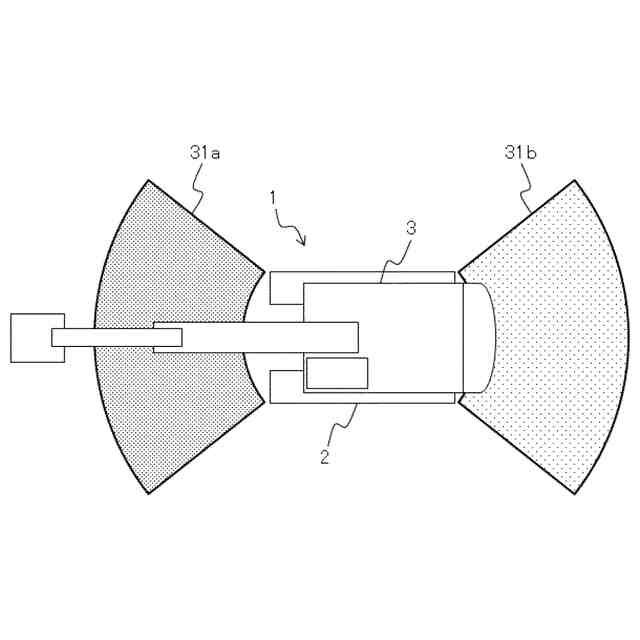
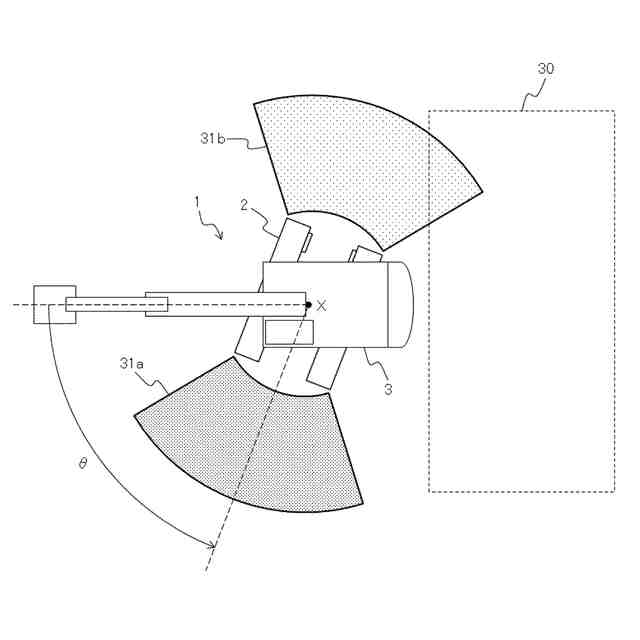
【解決手段】走行制御装置20は、相対角度検出装置10からの相対角度情報に基づいて、下部走行体2が走行する可能性のある領域を走行領域31a,31bとして設定し、環境認識装置17からの周囲環境情報に基づいて、下部走行体2の進入が禁止される領域を進入禁止領域30として設定し、走行領域31a,31bと進入禁止領域30とに重複領域が存在する場合に、走行操作装置9の操作を無効とする。
【選択図】 図3
特許請求の範囲
【請求項1】
下部走行体と、
前記下部走行体上に旋回可能に取り付けられた上部旋回体と、
前記下部走行体の動作を指示する走行操作装置と、
前記走行操作装置の操作に応じて前記下部走行体の動作を制御する走行制御装置とを備えた作業機械において、
前記下部走行体に対する前記上部旋回体の相対角度を検出する相対角度検出装置と、
前記作業機械の周囲の環境を認識する環境認識装置とを備え、
前記走行制御装置は、
前記相対角度検出装置からの相対角度情報に基づいて、前記下部走行体が走行する可能性のある領域を走行領域として設定し、
前記環境認識装置からの周囲環境情報に基づいて、前記下部走行体の進入が禁止される領域を進入禁止領域として設定し、
前記走行領域と前記進入禁止領域とに重複領域が存在する場合に、前記走行操作装置による操作を無効とする
ことを特徴とする作業機械。
続きを表示(約 780 文字)
【請求項2】
請求項1に記載の作業機械において、
前記走行制御装置は、前記走行領域として、前記走行操作装置から前記下部走行体の前進側の走行動作が指示された場合に前記下部走行体が進入する可能性のある前進領域と、前記走行操作装置から前記下部走行体の後進側の走行動作が指示された場合に前記下部走行体が進入する可能性のある後進領域とを設定し、
前記前進領域と前記進入禁止領域とに重複領域が存在する場合は、前記走行操作装置による前進側の走行操作を無効とし、
前記後進領域と前記進入禁止領域とに重複領域が存在する場合は、前記走行操作装置による後進側の走行操作を無効とする
ことを特徴とする作業機械。
【請求項3】
請求項1に記載の作業機械において、
前記環境認識装置は、前記作業機械の周囲に存在する物体までの距離を測定する測距センサである
ことを特徴とする作業機械。
【請求項4】
請求項3に記載の作業機械において、
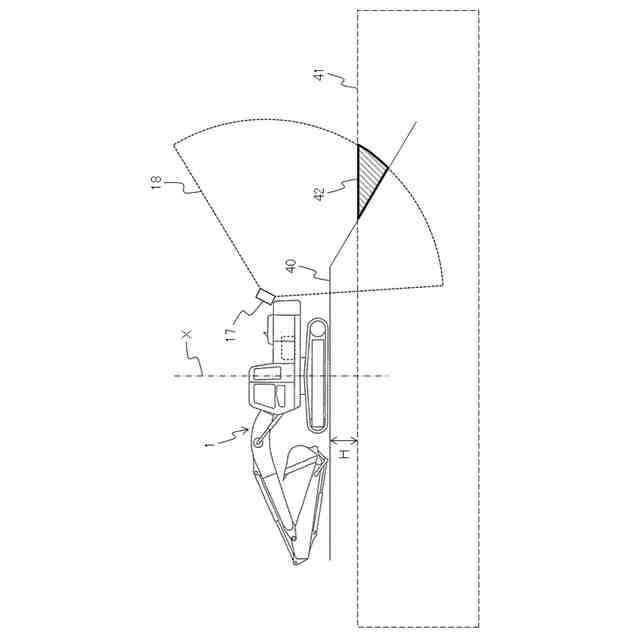
前記測距センサは、前記上部旋回体に、前記下部走行体の接地面側に傾斜して設置されており、
前記走行制御装置は、前記測距センサが距離を測定できなかった領域を前記進入禁止領域として設定する
ことを特徴とする作業機械。
【請求項5】
請求項4に記載の作業機械において、
前記走行制御装置は、
前記下部走行体の接地面よりも低い領域を機体下方空間として設定し、
前記機体下方空間と前記測距センサが距離を測定できなかった空間との重複空間を進入禁止空間として設定し、
前記進入禁止空間を前記上部旋回体の旋回軸に直交する平面に投影して得られる2次元領域を前記進入禁止領域として設定する
ことを特徴とする作業機械。
発明の詳細な説明
【技術分野】
【0001】
本発明は、下部走行体と上部旋回体とを備えた作業機械に関する。
続きを表示(約 1,900 文字)
【背景技術】
【0002】
下部走行体と上部旋回体を有する作業機械においては、下部走行体と上部旋回体の相対角度によって上部旋回体における前方と、下部走行体における前方とが一致しない。そのため、オペレータが前進と後進を誤って走行操作を行ってしまうケースが起こり得る。また、作業を行う場所は必ずしも平坦ではなく、傾斜地や高所にて作業が行われる際に、走行操作の誤操作によって機械が転倒する可能性がある。特許文献1では、下部走行体に対する上部旋回体の相対角度(旋回角度)をオペレータの見やすい位置に表示することで誤操作を防止する方法が提案されている。一方、特許文献2では、機械に取り付けたステレオカメラを使用して機械の周囲にある斜面や崖の情報を抽出してオペレータに通知する方法が提案されている。
【先行技術文献】
【特許文献】
【0003】
特開2001-73414号公報
特許第6386213号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1,2によれば、下部走行体と上部旋回体の相対角度または周囲の斜面や崖の情報を表示装置等に表示することによりオペレータが容易に認識することが可能となる。しかし、オペレータは常に表示装置を見ているわけではなく、作業機の動作に集中していることが多い。そのため、オペレータへの表示だけでは走行操作の誤りによる転倒を防止することはできない。また、周囲に斜面や崖があった場合に全ての走行操作を禁止してしまうと、リスクの低い方向へ走行することもできなくなり、安全性が低下するといった課題が生じる。
【0005】
本発明は、上記課題に鑑みてなされたものであり、その目的は、オペレータの不注意や走行操作の誤りによる転倒を防止することが可能な作業機械を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本発明は、下部走行体と、前記下部走行体上に旋回可能に取り付けられた上部旋回体と、前記下部走行体の動作を指示する走行操作装置と、前記走行操作装置の操作に応じて前記下部走行体の動作を制御する走行制御装置とを備えた作業機械において、前記下部走行体に対する前記上部旋回体の相対角度を検出する相対角度検出装置と、前記作業機械の周囲の環境を認識する環境認識装置とを備え、前記走行制御装置は、前記相対角度検出装置からの相対角度情報に基づいて、前記下部走行体が走行する可能性のある領域を走行領域として設定し、前記環境認識装置からの周囲環境情報に基づいて、前記下部走行体の進入が禁止される領域を進入禁止領域として設定し、前記走行領域と前記進入禁止領域とに重複領域が存在する場合に、前記走行操作装置の操作を無効とするものとする。
【0007】
以上のように構成した本発明によれば、オペレータが進入禁止領域の存在に気づいていない場合や、オペレータが進入禁止領域の存在を認識しつつも誤った走行操作を行った場合に、下部走行体が進入禁止領域に進入してしまうことを防止できる。これにより、オペレータの不注意や走行操作の誤りによる転倒を防止することが可能となる。
【発明の効果】
【0008】
本発明に係る作業機械によれば、オペレータの不注意や走行操作の誤りによる転倒を防止することが可能となる。
【図面の簡単な説明】
【0009】
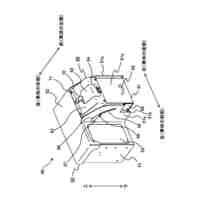
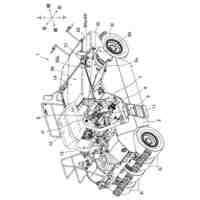
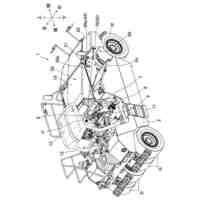
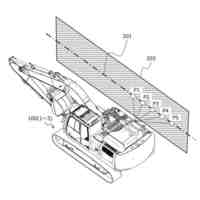
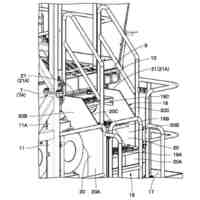
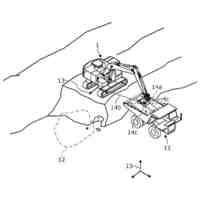
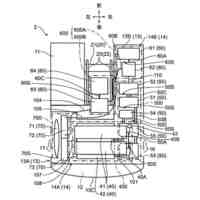
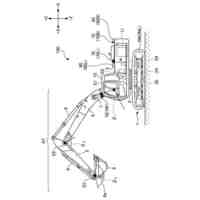
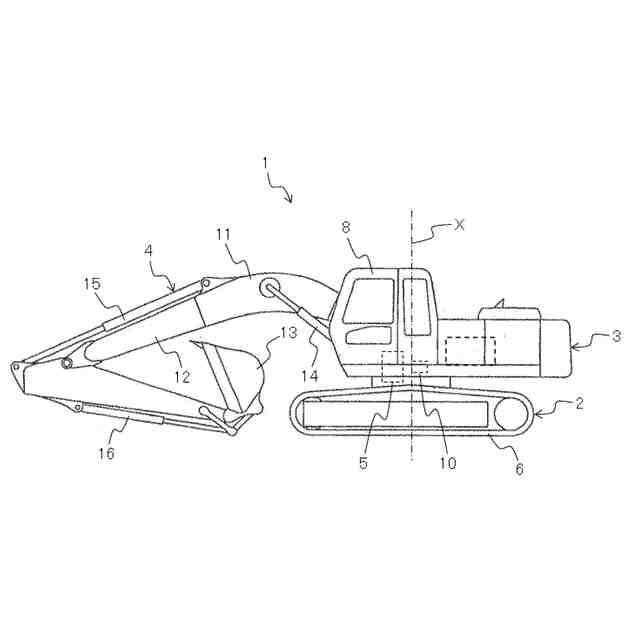
本発明の第1の実施例に係る油圧ショベルの側面図である。
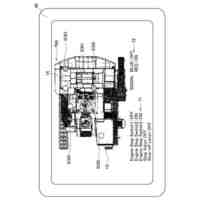
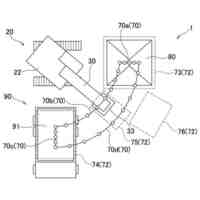
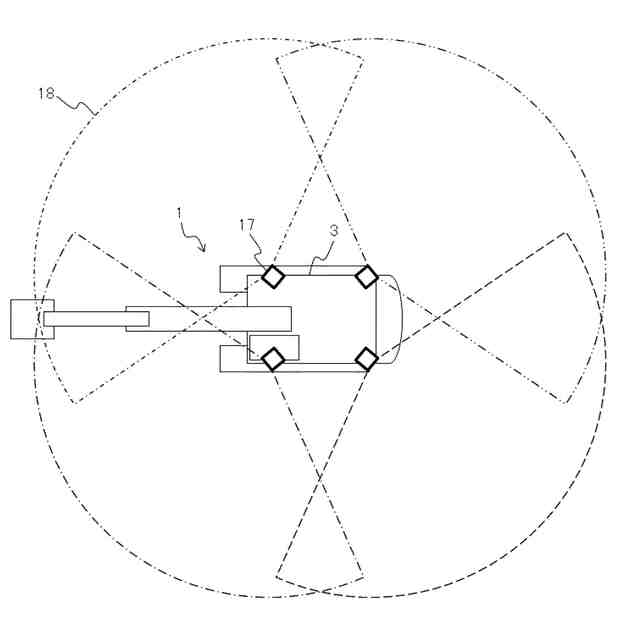
油圧ショベルを上方から見た図である。
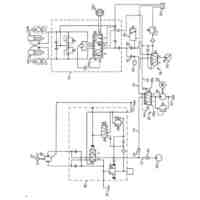
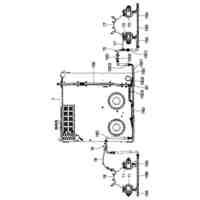
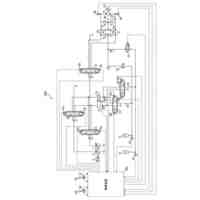
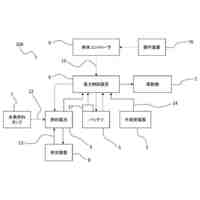
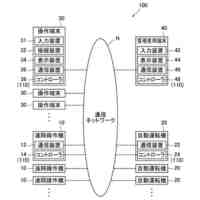
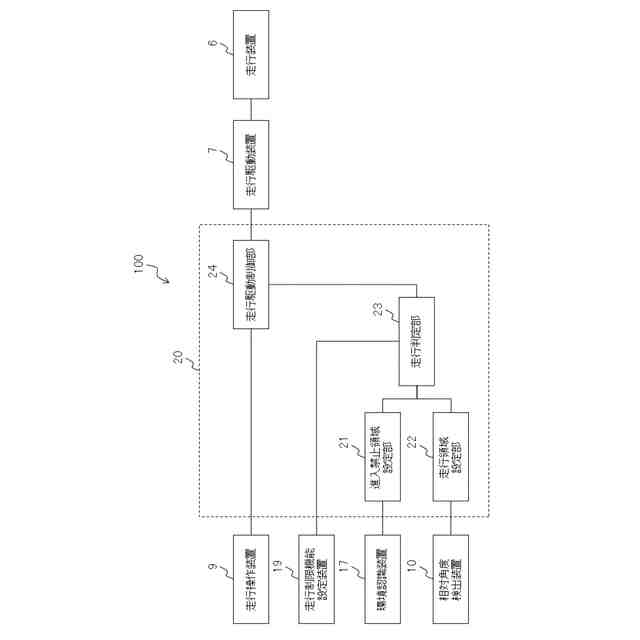
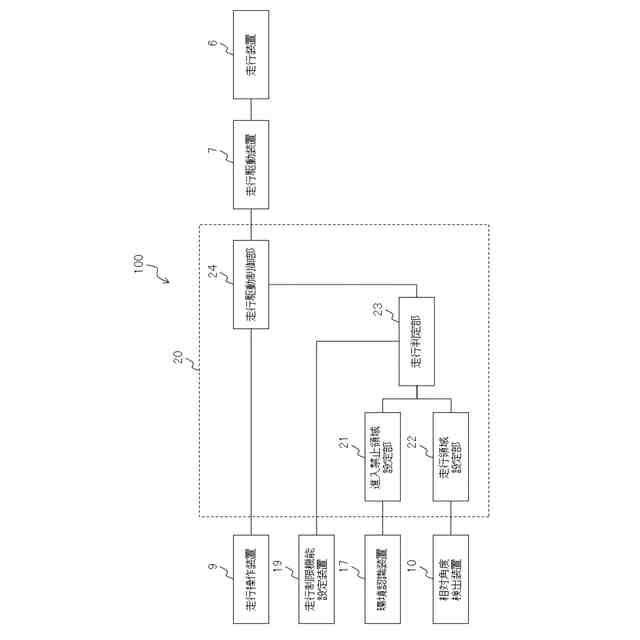
油圧ショベルに搭載された走行制御システムの構成を示す図である。
進入禁止領域設定部により設定された進入禁止領域の一例を示す図である。
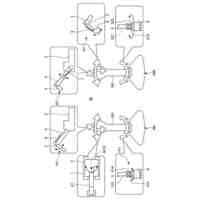
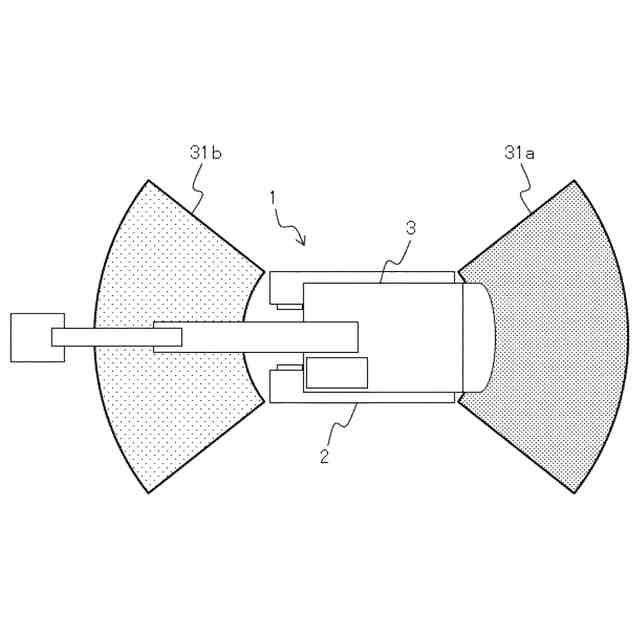
上部旋回体の下部走行体に対する相対角度が0度の場合の走行領域の一例を示す図である。
上部旋回体の下部走行体に対する相対角度が180度の場合の走行領域の一例を示す図である。
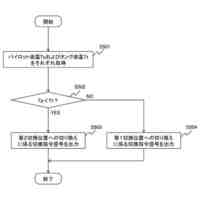
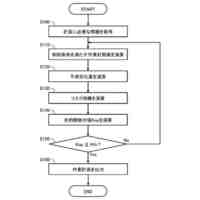
走行判定部の処理を示すフローチャートである。
走行領域と進入禁止領域とに重複領域が存在するか否かの判定方法を示す図である。
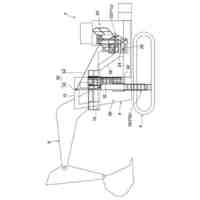
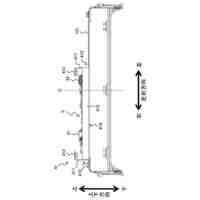
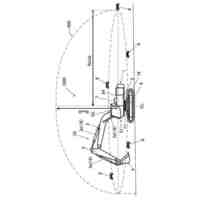
本発明の第2の実施例における進入禁止領域の設定方法を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態に係る作業機械として油圧ショベルを例に挙げ、図面を参照して説明する。なお、各図中、同等の部材には同一の符号を付し、重複した説明は適宜省略する。
【実施例】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
今日
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
建設機械
13日前
日立建機株式会社
作業機械
10日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
転圧機械
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
油圧駆動装置
1日前
日立建機株式会社
角度検出装置
10日前
日立建機株式会社
電動式建設機械
16日前
日立建機株式会社
ダンプトラック
17日前
日立建機株式会社
ホイールローダ
今日
日立建機株式会社
ダンプトラック
1日前
日立建機株式会社
ダンプトラック
1日前
日立建機株式会社
作業支援システム
2日前
日立建機株式会社
エンジン診断装置
13日前
日立建機株式会社
地形情報管理システム
6日前
日立建機株式会社
点検計画作成支援装置
13日前
日立建機株式会社
作業機械の報知システム
2日前
日立建機株式会社
作業機械の遠隔操作装置
今日
日立建機株式会社
作業機械及び遠隔制御装置
7日前
日立建機株式会社
遠隔操作制御装置および遠隔操作方法
2日前
個人
既設杭引抜装置
13日前
日立建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
松井金網工業株式会社
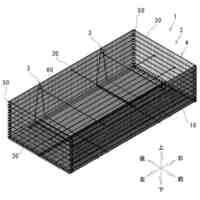
ふとん籠
9日前
住友重機械工業株式会社
作業機械
7日前
合同会社ハイドロパワー
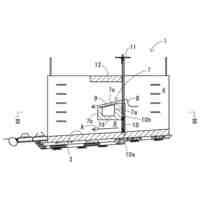
取水装置
今日
住友重機械工業株式会社
作業機械
今日
日立建機株式会社
建設機械
13日前
コベルコ建機株式会社
作業システム
15日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ