TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025044053
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023151740
出願日
2023-09-19
発明の名称
作業機械の報知システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
E02F
9/26 20060101AFI20250325BHJP(水工;基礎;土砂の移送)
要約
【課題】作業機械の移動に合わせて、作業機械の作業範囲を作業機械の周囲に適切に報知することが可能な作業機械の報知システムを提供する。
【解決手段】作業機械の報知システムは、無人飛行体を制御して、無人飛行体により作業機械の作業範囲を作業機械の周囲に報知させるコントローラを備える。作業機械は、走行装置を有する車体と、車体に取り付けられる作業装置と、を備え、コントローラは、作業機械の作業範囲の外側かつ作業範囲の境界から所定の距離以内の飛行エリア内において、作業機械の移動に応じて無人飛行体を移動させるとともに、無人飛行体により作業機械の作業範囲を作業機械の周囲に報知させる。
【選択図】図1
特許請求の範囲
【請求項1】
無人飛行体を制御して、前記無人飛行体により作業機械の作業範囲を前記作業機械の周囲に報知させるコントローラを備える作業機械の報知システムにおいて、
前記作業機械は、走行装置を有する車体と、前記車体に取り付けられる作業装置と、を備え、
前記コントローラは、前記作業機械の作業範囲の外側かつ前記作業範囲の境界から所定の距離以内の飛行エリア内において、前記作業機械の移動に応じて前記無人飛行体を移動させるとともに、前記無人飛行体により前記作業機械の作業範囲を前記作業機械の周囲に報知させる、
ことを特徴とする作業機械の報知システム。
続きを表示(約 890 文字)
【請求項2】
請求項1に記載の作業機械の報知システムにおいて、
前記コントローラは、前記無人飛行体の飛行軌道上に障害物が存在する場合には、前記飛行軌道を、前記飛行エリア内で前記障害物との干渉を回避可能な飛行軌道に修正する、
ことを特徴とする作業機械の報知システム。
【請求項3】
請求項1に記載の作業機械の報知システムにおいて、
前記コントローラは、
前記作業機械の移動方向における前記作業機械の作業半径に基づいて、最小飛行半径及び最大飛行半径を設定し、
前記最小飛行半径及び前記最大飛行半径と、入力装置により入力される任意の高さとによって、前記無人飛行体の飛行軌道を設定する、
ことを特徴とする作業機械の報知システム。
【請求項4】
請求項1に記載の作業機械の報知システムにおいて、
前記作業範囲は、前記作業機械の移動方向における前記作業機械の作業半径と、前記移動方向に直交する垂直方向における前記作業機械の作業半径とによって規定され、
前記コントローラは、前記作業機械から前記垂直方向に離れるほど、前記飛行エリアを規定する最小飛行半径及び最大飛行半径を小さくする
ことを特徴とする作業機械の報知システム。
【請求項5】
請求項1に記載の作業機械の報知システムにおいて、
前記コントローラには、前記作業機械の複数の操作状態と、複数の飛行パターンとが対応付けられて記憶され、
前記コントローラは、
前記作業機械の操作状態を監視し、
前記作業機械の操作状態に応じた前記飛行パターンに基づいて、前記無人飛行体を飛行させる、
ことを特徴とする作業機械の報知システム。
【請求項6】
請求項5に記載の作業機械の報知システムにおいて、
前記コントローラは、入力装置からの入力情報に基づいて、前記操作状態に対応付けられた前記飛行パターンを変更する、
ことを特徴とする作業機械の報知システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械の報知システムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
油圧ショベルなどの作業機械が作業を行う作業現場において、ドローンなどの無人飛行体を利用して作業機械の作業を支援する技術が知られている。特許文献1には、複数のドローンにより作業現場の測量や掘削状況の確認などを行う技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
WO2022/074863
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業現場には、作業機械の周囲で作業を行う作業員等がいる。作業機械の作業範囲に作業員が立ち入ることを防止するために、作業現場には、誘導灯を持った誘導員が配置される。しかしながら、作業機械が移動して作業機械の位置が変化すると、作業範囲の位置も変化する。このため、誘導員は、作業員に対して、作業機械の作業範囲の境界を誘導灯で適切に知らせることが難しい。
【0005】
本発明は、作業機械の移動に合わせて、作業機械の作業範囲を作業機械の周囲に適切に報知することが可能な作業機械の報知システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による作業機械の報知システムは、無人飛行体を制御して、前記無人飛行体により作業機械の作業範囲を前記作業機械の周囲に報知させるコントローラを備える。前記作業機械は、走行装置を有する車体と、前記車体に取り付けられる作業装置と、を備え、前記コントローラは、前記作業機械の作業範囲の外側かつ前記作業範囲の境界から所定の距離以内の飛行エリア内において、前記作業機械の移動に応じて前記無人飛行体を移動させるとともに、前記無人飛行体により前記作業機械の作業範囲を前記作業機械の周囲に報知させる。
【発明の効果】
【0007】
本発明によれば、作業機械の移動に合わせて、作業機械の作業範囲を作業機械の周囲に適切に報知することが可能な作業機械の報知システムを提供することができる。
【図面の簡単な説明】
【0008】
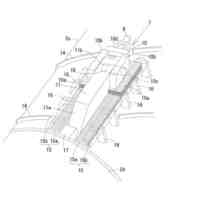
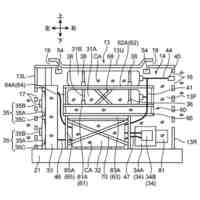
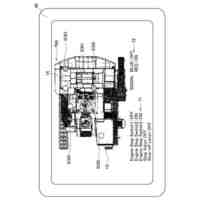
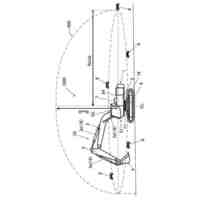
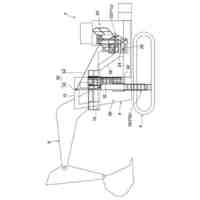
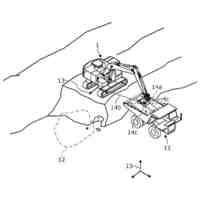
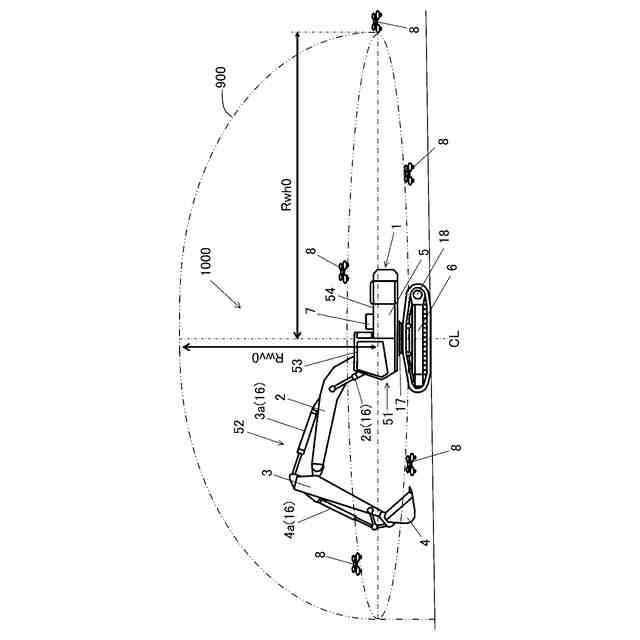
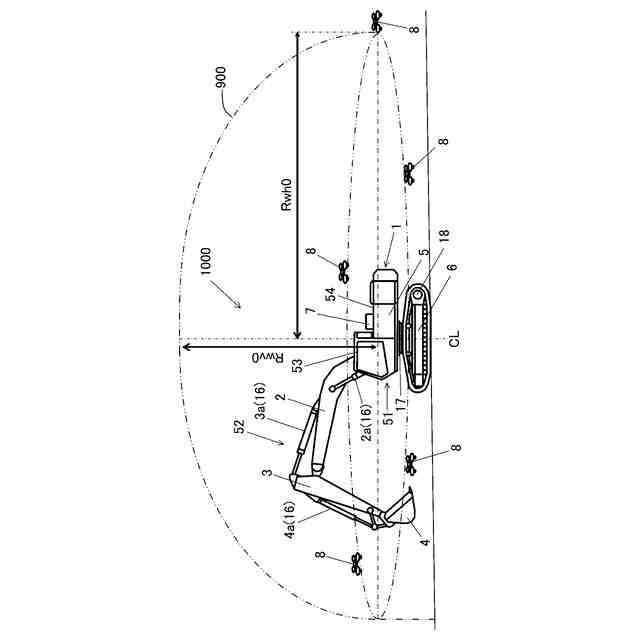
図1は、油圧ショベル1と、油圧ショベル1の周囲を飛行するドローン8を示す図である。
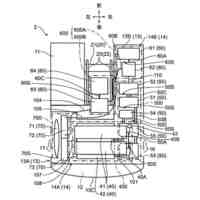
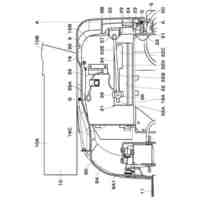
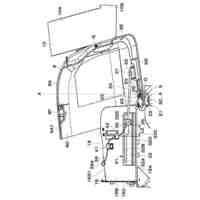
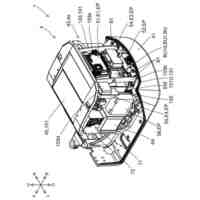
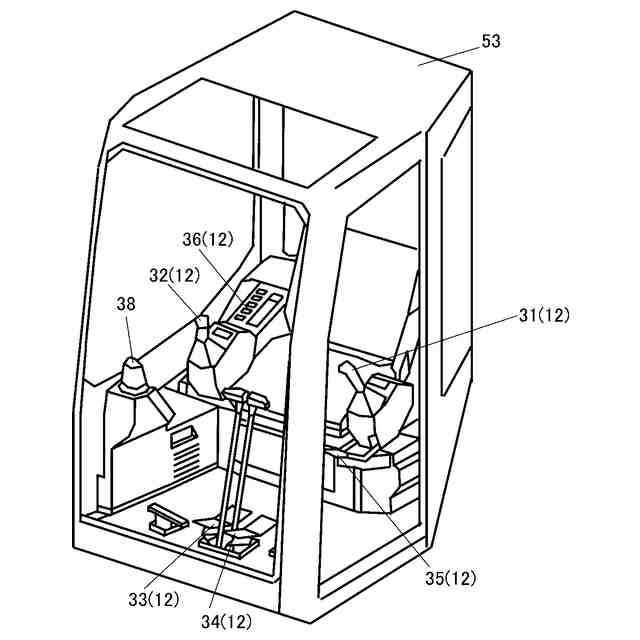
図2は、キャブ53の内部を示す斜視図である。
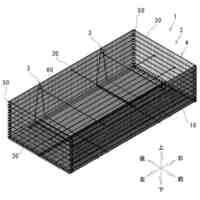
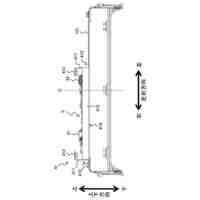
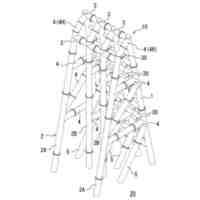
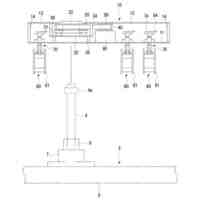
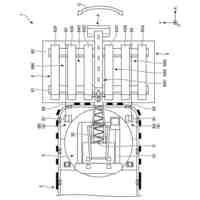
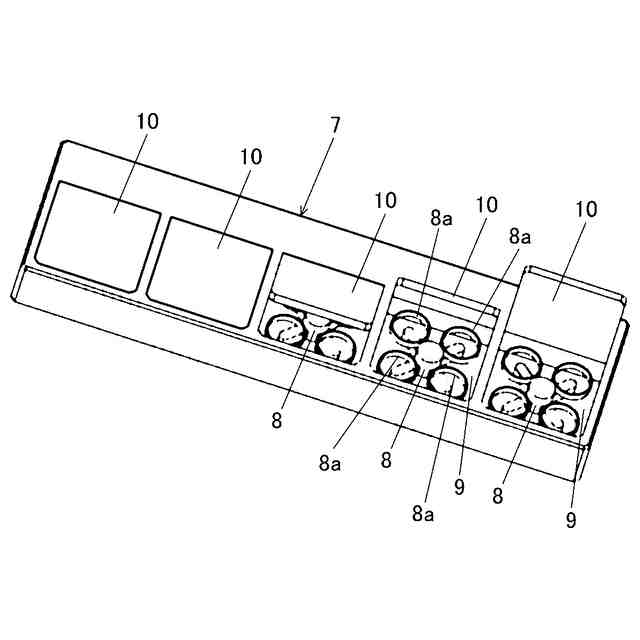
図3は、離着陸装置7の斜視図である。
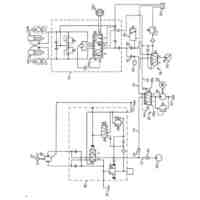
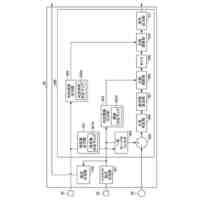
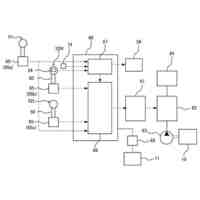
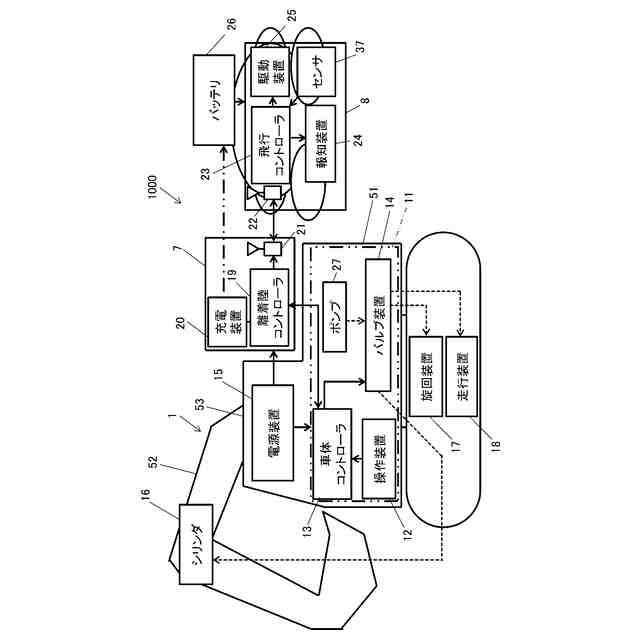
図4は、油圧ショベル1及びドローン8の構成を示す図である。
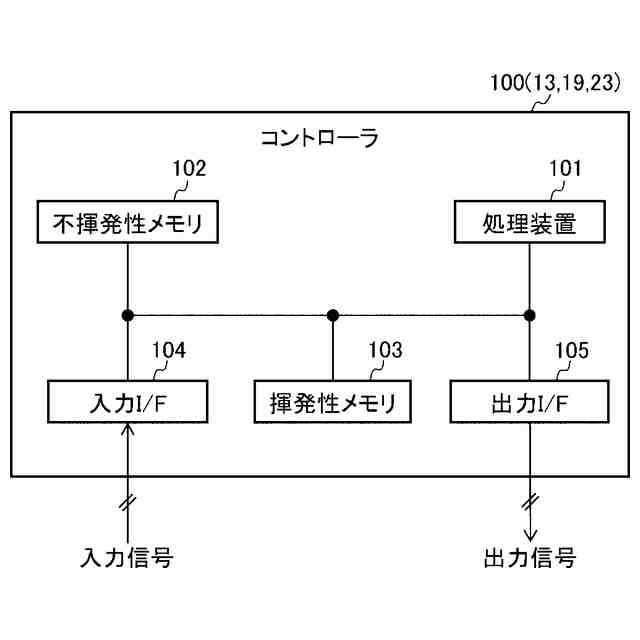
図5は、コントローラ100のハードウェア構成を示す図である。
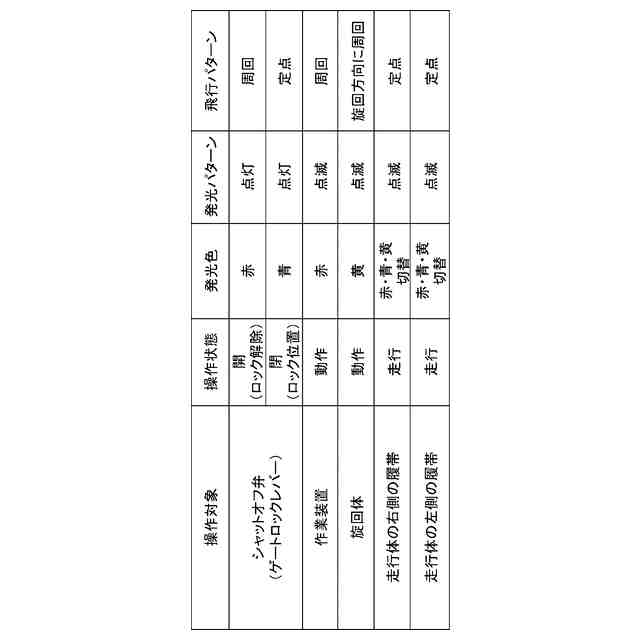
図6は、飛行条件テーブルを示す図である。
図7は、第1実施形態に係る離着陸コントローラ19の機能ブロック図である。
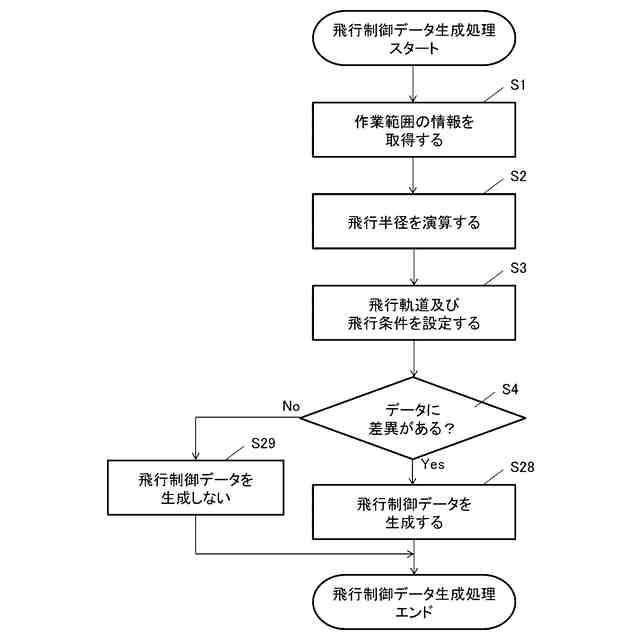
図8は、第1実施形態に係る離着陸コントローラ19により実行される飛行制御データの生成処理の流れの一例を示すフローチャートである。
図9は、飛行軌道の設定方法の一例を示す図である。
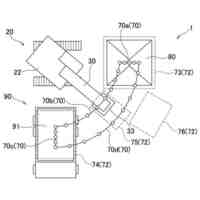
図10は、飛行パターンの選択肢の中から「定点」が選択されたときのドローン8の飛行形態の一例を示す図である。
図11は、飛行角度範囲θの選択肢の中から「前」が選択され、かつ、飛行パターンの選択肢の中から「定点」が選択されたときのドローン8の飛行形態の一例を示す図である。
図12は、飛行角度範囲θの選択肢の中から「全周」が選択され、かつ、飛行パターンの選択肢の中から「周回」が選択されたときのドローン8の飛行形態の一例を示す図である。
図13は、第1実施形態に係る離着陸コントローラ19により実行されるドローン8の飛行制御の処理の流れの一例を示すフローチャートである。
図14は、第2実施形態に係る飛行制御部216の機能ブロック図である。
図15は、第2実施形態に係る離着陸コントローラ19により実行される障害物検知処理の一例について示すフローチャートである。
図16は、変形例1に係る離着陸コントローラ19により設定される飛行エリアについて説明する図である。
【発明を実施するための形態】
【0009】
図面を参照して、本発明の実施形態に係る作業機械の報知システム1000について説明する。本実施形態では、作業機械が履帯走行式の油圧ショベル1である例について説明する。
【0010】
<第1実施形態>
図1は、油圧ショベル1と、油圧ショベル1の周囲を飛行するドローン8を示す図である。油圧ショベル1は、車体51と、車体51に取り付けられる作業装置52と、を備える。油圧ショベル1は、作業現場において、作業装置52により土木作業、建設作業、解体作業、浚渫作業等の作業を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
既設杭引抜装置
13日前
松井金網工業株式会社
ふとん籠
9日前
日立建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
住友重機械工業株式会社
作業機械
7日前
日立建機株式会社
建設機械
13日前
コベルコ建機株式会社
作業システム
15日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械の報知システム
2日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
作業機械
2日前
株式会社インバックス
ソイルセメントの製造方法
13日前
日立建機株式会社
作業機械及び遠隔制御装置
7日前
株式会社日立建機ティエラ
建設機械
13日前
株式会社日立建機ティエラ
建設機械
13日前
日立建機株式会社
角度検出装置
10日前
株式会社イノアック住環境
法面構造及び廃棄物処分場
7日前
日鉄建材株式会社
鋼製スリットダム
1日前
株式会社小松製作所
バッテリ駆動式作業機械
8日前
株式会社竹中工務店
埋込金物の設置方法
15日前
日立建機株式会社
地形情報管理システム
6日前
住友建機株式会社
ショベル、及びショベルの遠隔操作システム
13日前
第一復建株式会社
転倒堰制御システムと転倒堰制御方法とそのプログラム
13日前
株式会社IHIインフラ建設
水門開閉装置
6日前
若築建設株式会社
捨石マウンド均し装置及び捨石マウンド均し方法
9日前
ヤンマーホールディングス株式会社
電動式作業機械
7日前
株式会社イノアック住環境
軽量盛土構造及び軽量盛土構造の製造方法
7日前
ヤンマーホールディングス株式会社
電動式作業機械
7日前
ヤンマーホールディングス株式会社
作業機械および作業機械の制御方法
8日前
大和ハウス工業株式会社
地盤改良基礎構造および地盤改良基礎構造の構築方法
13日前
コベルコ建機株式会社
操作装置および操作システム
13日前
三井化学産資株式会社
蒸散方法および蒸散促進シート
9日前
株式会社ネオコンクリート
防災ブロックの製造装置及び防災ブロックの製造方法
9日前
日本製鉄株式会社
鋼材の接合継手及び鋼材の接合構造
15日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ