TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025039530
公報種別
公開特許公報(A)
公開日
2025-03-21
出願番号
2024141726
出願日
2024-08-23
発明の名称
操作装置および操作システム
出願人
コベルコ建機株式会社
代理人
弁理士法人三協国際特許事務所
主分類
E02F
9/20 20060101AFI20250313BHJP(水工;基礎;土砂の移送)
要約
【課題】オペレータが快適に操作をすることのできる操作装置および操作システムを提供する。
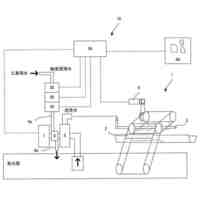
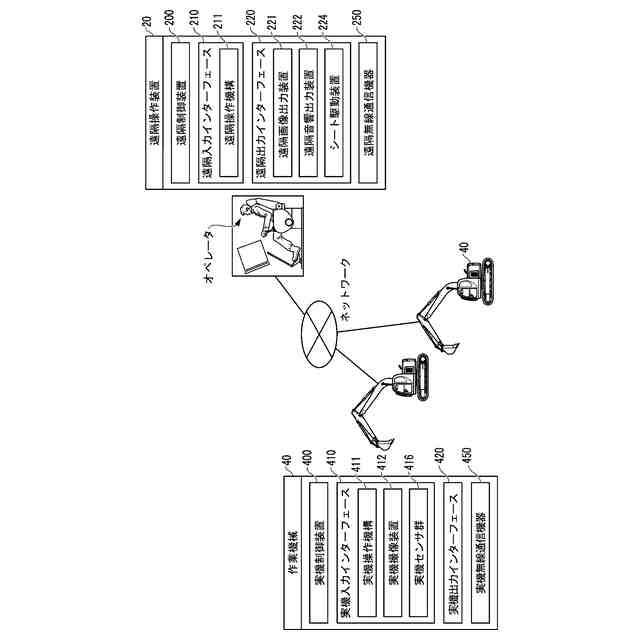
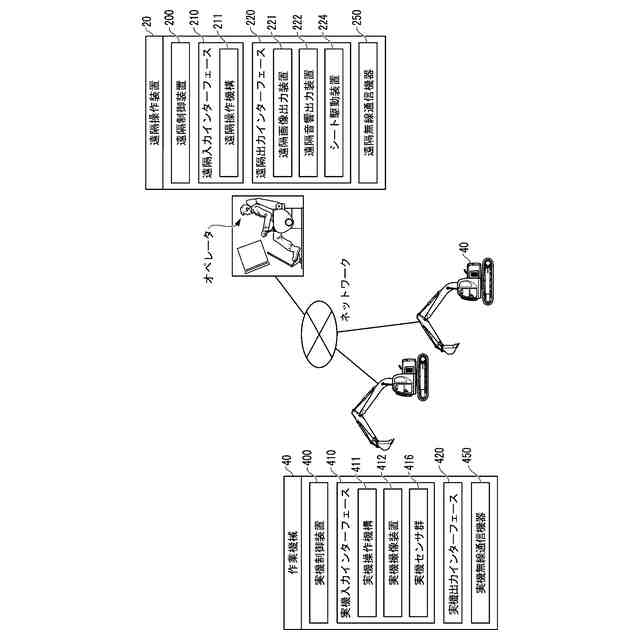
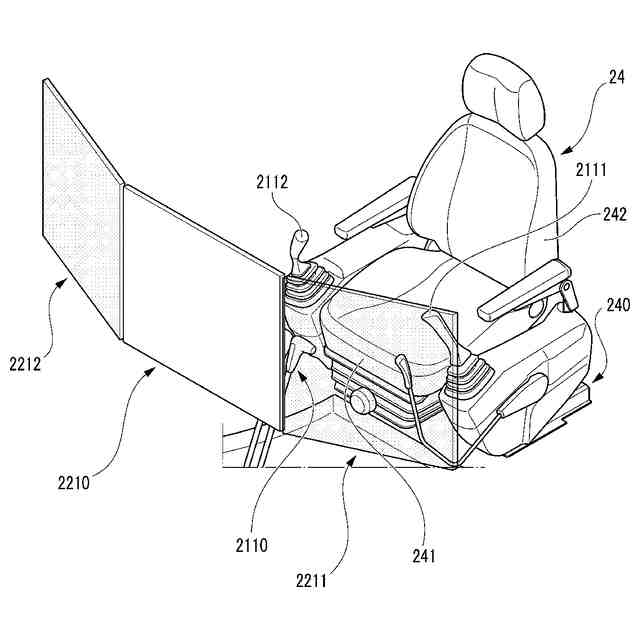
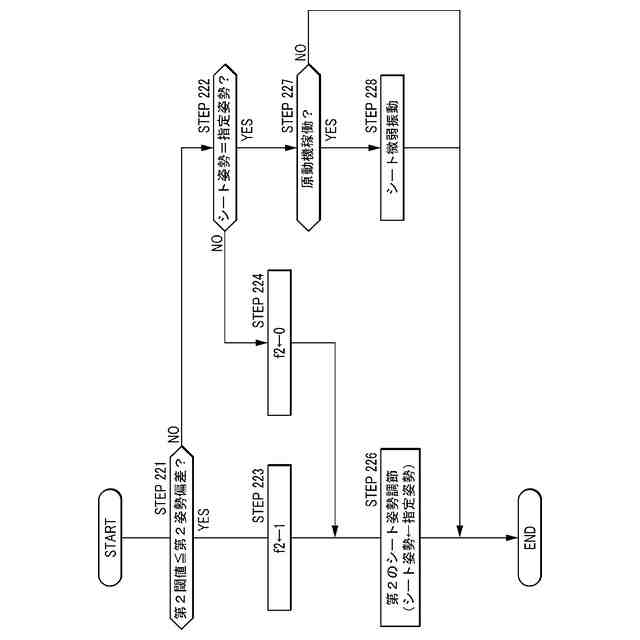
【解決手段】操作対象を操作するための操作装置は、シートと、オペレータによる操作を受け付ける操作機構211と、前記シートの姿勢を調節することが可能な駆動装置224と、前記操作対象の姿勢の時系列に応じて前記シートの姿勢が時系列で変化するように前記シートの姿勢を調節する第1駆動処理と、前記操作機構を通じた前記操作対象に対する操作指示がない非操作状態において前記シートの姿勢を指定姿勢に調節する第2駆動処理とを実行するように前記駆動装置を制御することが可能な制御装置200と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
操作対象を操作するための操作装置であって、
シートと、
オペレータによる操作を受け付ける操作機構と、
前記シートの姿勢を調節することが可能な駆動装置と、
前記操作対象の姿勢の時系列に応じて前記シートの姿勢が時系列で変化するように前記シートの姿勢を調節する第1駆動処理と、前記操作機構を通じた前記操作対象に対する操作指示がない非操作状態において前記第1駆動処理の実行を中断しかつ前記シートの姿勢を指定姿勢に調節する第2駆動処理とを実行するように前記駆動装置を制御することが可能な制御装置と、
を備える、操作装置。
続きを表示(約 930 文字)
【請求項2】
請求項1に記載の操作装置において、
前記制御装置は、前記非操作状態が指定時間以上にわたり継続した場合に、前記第2駆動処理を実行する、操作装置。
【請求項3】
請求項1または2に記載の操作装置において、
前記指定姿勢は、前記非操作状態の始期における前記シートの姿勢、前記シートの初期姿勢または前記シートの座部が水平になる姿勢である、操作装置。
【請求項4】
請求項1または2に記載の操作装置において、
オペレータから前記第2駆動処理を実行するための指令の入力を受け付ける入力部を更に備える、操作装置。
【請求項5】
請求項1または2に記載の操作装置において、
前記制御装置は、前記第1駆動処理において、前記操作対象の姿勢と前記シートの姿勢との乖離度が高いほど、前記操作対象の姿勢と前記シートの姿勢とを整合させるための前記シートの姿勢変化速度が小さくなるように、前記駆動装置を制御する、操作装置。
【請求項6】
請求項1または2に記載の操作装置において、
前記制御装置は、前記第1駆動処理において、前記操作対象の姿勢の時系列を基に前記姿勢の時系列に含まれている周波数成分を特定し、前記姿勢の時系列から特定した前記周波数成分のうちの閾値以上の高周波成分を除去するローパスフィルタ処理を実行し、前記ローパスフィルタ処理がされた前記姿勢の時系列に応じて、前記駆動装置を制御して前記シートの姿勢を調節する、操作装置。
【請求項7】
請求項1または2に記載の操作装置において、
前記制御装置は、前記第2駆動処理において、前記操作対象の原動機の稼働に応じて、前記指定姿勢とされた前記シートを振動させる、操作装置。
【請求項8】
請求項1または2に記載の操作装置において、
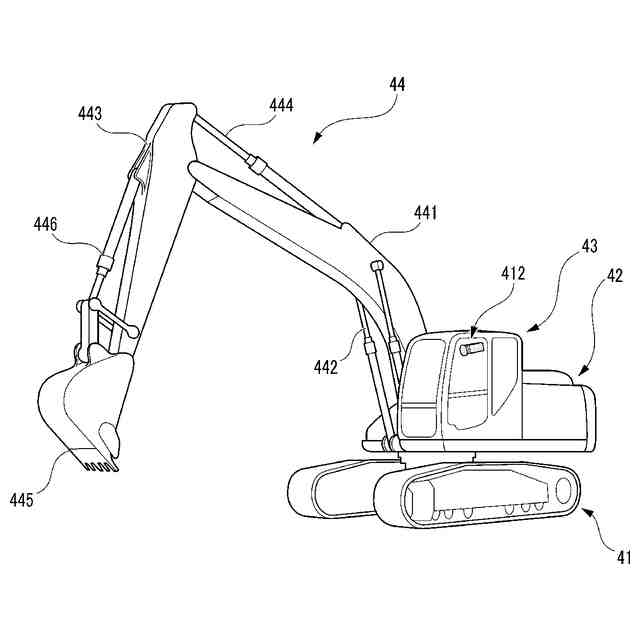
前記操作対象としての作業機械を操作するように構成されている、操作装置。
【請求項9】
操作システムであって、
請求項1または2に記載の操作装置と、
前記操作対象と、
を備える、操作システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、操作対象を操作する操作装置および操作システムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
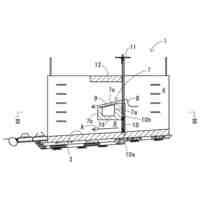
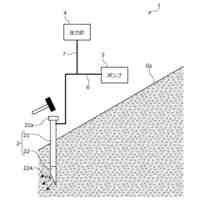
操作対象としての作業機械を遠隔操作するオペレータに体感的に作業機械の情報を与える技術が提案されている(例えば、特許文献1参照)。当該技術には、遠隔地に設置された遠隔操縦設備からオペレータが作業機械を操縦する作業機械の遠隔操縦システムが開示されている。遠隔操縦設備はオペレータが着座する座席と当該座席を傾斜させる傾斜駆動手段とを有し、作業機械は機体の傾斜方向と傾斜量を検出する傾斜検出手段を備えている。傾斜駆動手段は、作業機械の走行中において傾斜検出手段により検出される機体の傾斜方向とその傾斜量に対して、前記座席が同調するように座席を傾斜させるとともに、作業機械が走行していないときには走行停止した瞬間の傾斜量を保つように前記座席の傾斜を制御する。
【先行技術文献】
【特許文献】
【0003】
特許第6220961号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
非操作時などオペレータが作業機械を操作する意思のない場合に、上記の技術のように機体の傾斜に同調するように座席を傾斜させると、座席に着座しているオペレータに不快感または違和感を覚えさせるおそれがある。
【0005】
本発明の目的は、オペレータが快適に操作をすることのできる操作装置および操作システムを提供することにある。
【課題を解決するための手段】
【0006】
本発明の第1の発明によって提供されるのは、操作対象を操作するための操作装置であって、シートと、オペレータによる操作を受け付ける操作機構と、前記シートの姿勢を調節することが可能な駆動装置と、前記操作対象の姿勢の時系列に応じて前記シートの姿勢が時系列で変化するように前記シートの姿勢を調節する第1駆動処理と、前記操作機構を通じた前記操作対象に対する操作指示がない非操作状態において前記第1駆動処理の実行を中断しかつ前記シートの姿勢を指定姿勢に調節する第2駆動処理とを実行するように前記駆動装置を制御することが可能な制御装置と、を備える。
【0007】
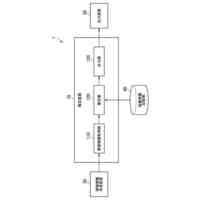
当該構成の操作装置によれば、制御装置により第1駆動処理が実行されることにより、シートの姿勢が調節され、当該シートに着座したオペレータに操作対象の姿勢の時系列(時間変化態様)の変化を伝達する(または認識させる)ことができる。その一方、オペレータによる操作対象に対する操作指示がない非操作状態において、第1駆動処理が中断され第2駆動処理が実行される。これにより、シートの姿勢が指定姿勢に調節または保持されるとともに、当該シートに着座しているオペレータに対する操作対象の姿勢の時系列変化の伝達が遮断される。
【0008】
本発明の第2の発明は、前記第1の発明に係る操作装置において、前記制御装置は、前記非操作状態が指定時間以上にわたり継続した場合に、前記第2駆動処理を実行するものでもよい。
【0009】
当該構成の操作装置によれば、指定時間以上にわたりオペレータによる操作対象の操作指示がなく、当該オペレータに操作対象の操作意思がない蓋然性が高い場合、シートに着座しているオペレータに対する操作対象の姿勢の時系列変化の伝達が遮断されうる。
【0010】
本発明の第3の発明は、前記第1または第2の発明に係る操作装置において、前記指定姿勢は、前記非操作状態の始期における前記シートの姿勢、前記シートの初期姿勢または前記シートの座部が水平になる姿勢であるものでもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
合同会社ハイドロパワー
取水装置
4日前
日立建機株式会社
走行装置
今日
住友重機械工業株式会社
作業現場監視システム
3日前
株式会社日立建機ティエラ
建設機械
3日前
日立建機株式会社
電動式作業車両
3日前
株式会社日立建機ティエラ
掘削バケット
今日
日立建機株式会社
作業機械の制御装置
今日
株式会社大林組
計算システム、計算方法及び計算プログラム
3日前
東亜建設工業株式会社
洗掘防止構造の構築方法
3日前
UBEマシナリー株式会社
除塵装置の洗浄水ポンプ軸受潤滑水制御装置及びその制御方法
3日前
旭化成建材株式会社
杭施工性評価システム、プログラム及び杭施工性評価方法
3日前
大和ハウス工業株式会社
掘削治具、これを用いた基礎杭の補強方法、および杭構造
3日前
日特建設株式会社
グラウンドアンカーの緊張構造、及び、グラウンドアンカーの定着方法
4日前
国立大学法人 宮崎大学
土層用空気圧送試験器および土層用空気圧送試験方法
4日前
国網新疆電力有限公司電力科学研究院
複雑な環境でのInSAR技術を用いた地域送電路変形のモニタリング方法及びシステム
今日
株式会社ビヨンドサイエンス
新しいシンバイオティクス製剤
4日前
他の特許を見る

 特許ウォッチ
特許ウォッチ