TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025038550
公報種別
公開特許公報(A)
公開日
2025-03-19
出願番号
2023145232
出願日
2023-09-07
発明の名称
作業システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250312BHJP(水工;基礎;土砂の移送)
要約
【課題】目標軌跡が正しく設定されているか否かを確認することが可能な作業システムを提供する。
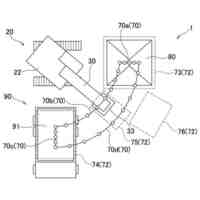
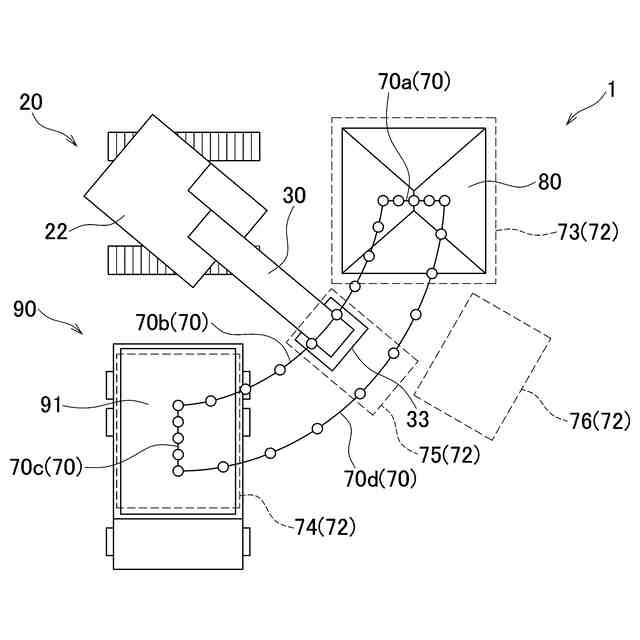
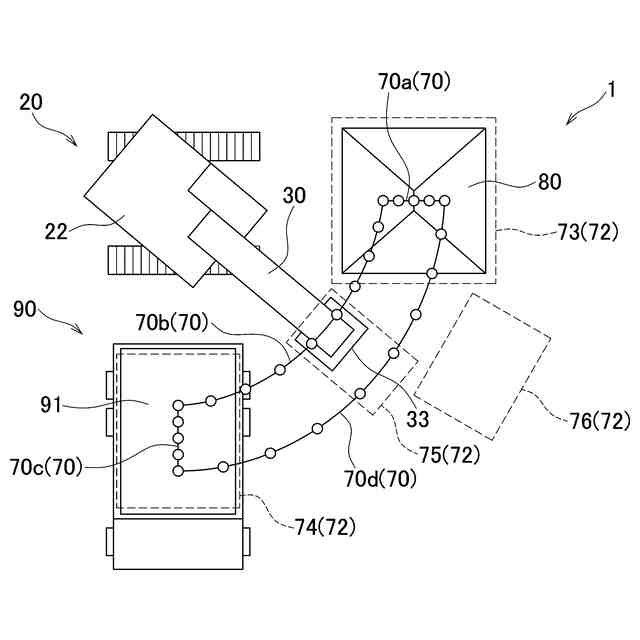
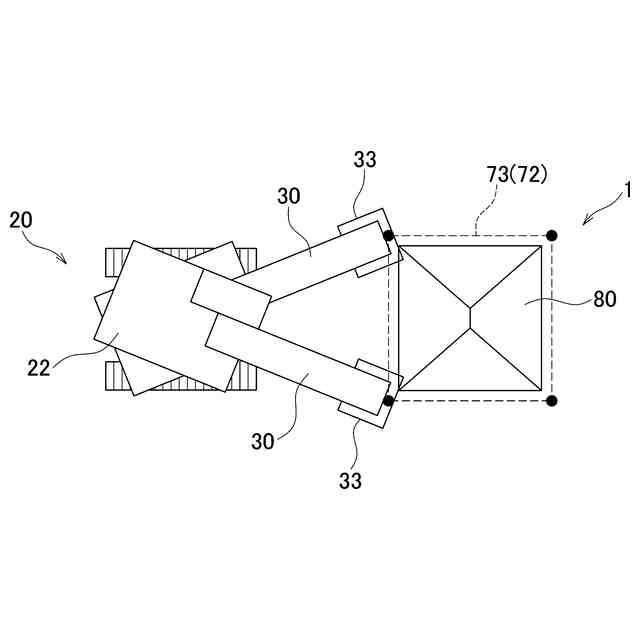
【解決手段】バケット33の先端が目標軌跡70に沿って移動するように、上部旋回体22およびアタッチメント30を動作させる制御手段と、作業現場に設定された所定の領域72と目標軌跡70との相対位置を算出する算出手段と、算出手段が算出した相対位置に基づいて、目標軌跡70が正しく設定されているか否かを確認する確認手段と、を有する。
【選択図】図3
特許請求の範囲
【請求項1】
作業機械を備えた作業システムであって、
下部走行体と、
前記下部走行体の上部に旋回可能に取り付けられた上部旋回体と、
前記上部旋回体に回動可能に取り付けられたアタッチメントと、
前記アタッチメントの特定部位が目標軌跡に沿って移動するように、前記上部旋回体および前記アタッチメントを動作させる制御手段と、
作業現場に設定された所定の領域と前記目標軌跡との相対位置を算出する算出手段と、
前記算出手段が算出した前記相対位置に基づいて、前記目標軌跡が正しく設定されているか否かを確認する確認手段と、
を有することを特徴とする作業システム。
続きを表示(約 770 文字)
【請求項2】
前記確認手段は、前記相対位置に基づいて、前記目標軌跡が正しく設定されているか否かを判定する判定手段を有することを特徴とする請求項1に記載の作業システム。
【請求項3】
前記判定手段は、前記目標軌跡が正しく設定されていないと判定した場合に、その判定理由を出力することを特徴とする請求項2に記載の作業システム。
【請求項4】
前記確認手段は、前記相対位置をディスプレイに表示させる表示手段を有することを特徴とする請求項1に記載の作業システム。
【請求項5】
前記所定の領域は、前記特定部位の移動元の領域および移動先の領域の少なくとも一方を含むことを特徴とする請求項1に記載の作業システム。
【請求項6】
前記所定の領域は、前記移動元の領域と前記移動先の領域との間の中間領域を含むことを特徴とする請求項5に記載の作業システム。
【請求項7】
前記所定の領域は、前記特定部位の侵入が禁止される禁止領域を含むことを特徴とする請求項1に記載の作業システム。
【請求項8】
ティーチングに基づいて、前記目標軌跡を設定する軌跡設定手段を有することを特徴とする請求項1に記載の作業システム。
【請求項9】
作業者の入力操作を受け付ける入力装置と、
前記入力装置への入力操作に基づいて、前記目標軌跡を設定する軌跡設定手段を有することを特徴とする請求項1に記載の作業システム。
【請求項10】
前記作業機械の周囲を撮像する撮像装置と、
前記撮像装置の撮像結果に基づいて、前記目標軌跡を設定する軌跡設定手段を有することを特徴とする請求項1に記載の作業システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械を備えた作業システムに関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
特許文献1には、アタッチメントの特定部位の目標軌跡に沿って、アタッチメントの特定部位が移動するように、作業機械が自動運転されることが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-64000号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1では、目標軌跡が正しく設定されていることが前提となっている。しかし、自動運転では、目標軌跡に沿ってアタッチメントの動きが忠実に再現されるため、目標軌跡が正しく設定されているか否かが重要となる。
【0005】
本発明の目的は、目標軌跡が正しく設定されているか否かを確認することが可能な作業システムを提供することである。
【課題を解決するための手段】
【0006】
本発明は、作業機械を備えた作業システムであって、下部走行体と、前記下部走行体の上部に旋回可能に取り付けられた上部旋回体と、前記上部旋回体に回動可能に取り付けられたアタッチメントと、前記アタッチメントの特定部位が目標軌跡に沿って移動するように、前記上部旋回体および前記アタッチメントを動作させる制御手段と、作業現場に設定された所定の領域と前記目標軌跡との相対位置を算出する算出手段と、前記算出手段が算出した前記相対位置に基づいて、前記目標軌跡が正しく設定されているか否かを確認する確認手段と、を有することを特徴とする。
【発明の効果】
【0007】
本発明によると、作業現場に設定された所定の領域と目標軌跡との相対位置が算出される。算出された相対位置に基づいて、目標軌跡が正しく設定されているか否かが確認される。例えば、算出された相対位置から、目標軌跡が正しく設定されているか否かを自動で判定することができる。また、例えば、算出された相対位置がディスプレイに表示される。作業機械の作業を監視する作業者などは、相対位置を目視することで、目標軌跡が正しく設定されているか否かを判定することができる。これにより、目標軌跡が正しく設定されているか否かを確認することができる。
【図面の簡単な説明】
【0008】
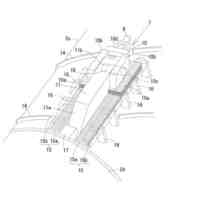
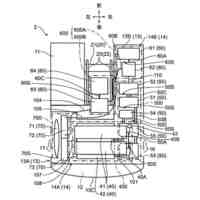
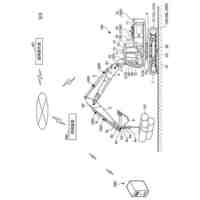
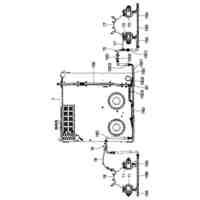
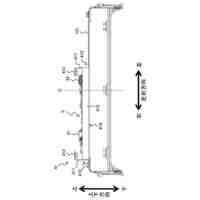
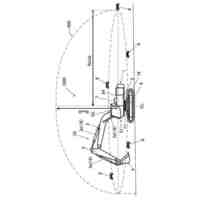
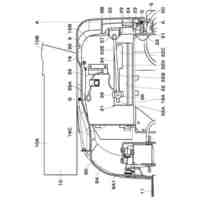
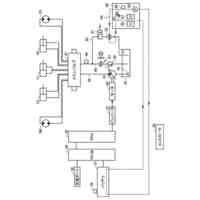
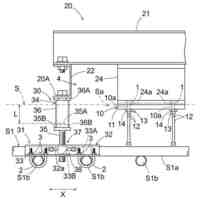
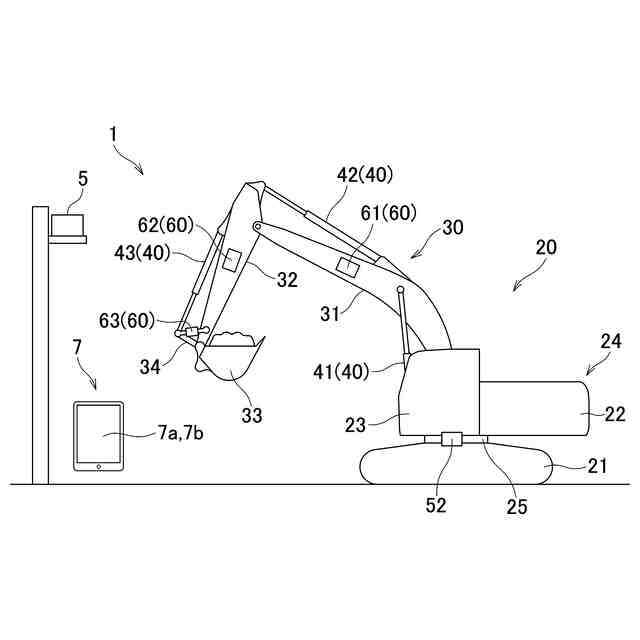
作業システムの側面図である。
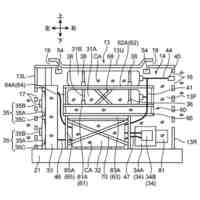
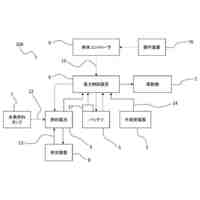
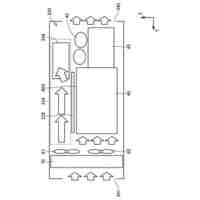
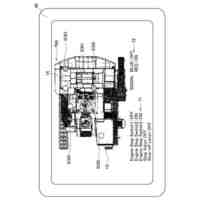
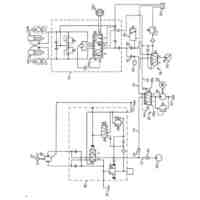
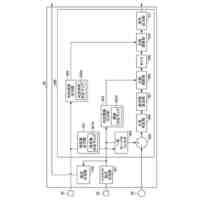
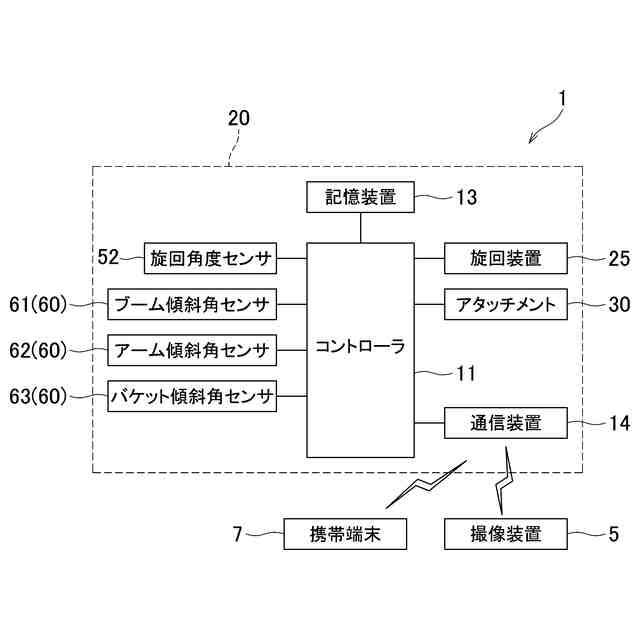
作業システムの機能構成図である。
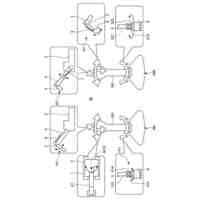
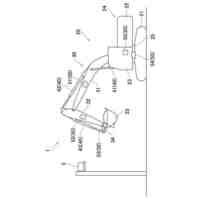
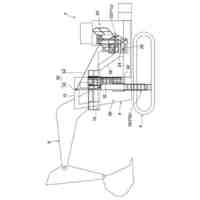
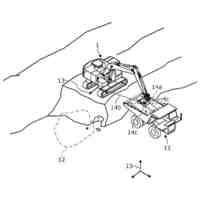
作業機械の上面図である。
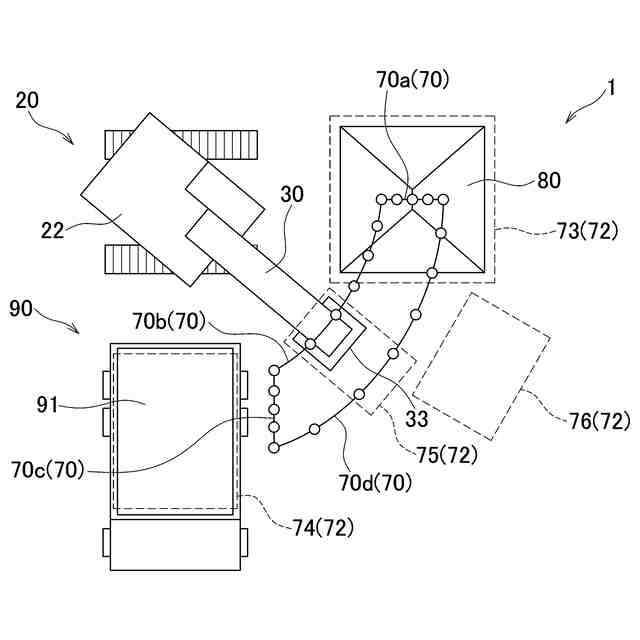
作業機械の上面図であり、目標軌跡が正しく設定されていない場合を示す図である。
作業機械の上面図であり、移動元の領域を設定する様子を示す図である。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
(作業システムの構成)
本実施形態による作業システム1は、作業システム1の側面図である図1に示すように、作業機械20を備えている。作業機械20は、アタッチメント30で作業を行う機械であり、例えば油圧ショベルである。作業機械20は、下部走行体21と上部旋回体22とを備えた機械本体24と、アタッチメント30と、シリンダ40と、を有している。本実施形態において、作業機械20は自動運転される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
砂堆積ネット
20日前
個人
既設杭引抜装置
13日前
個人
一種の新型水力発電装置
20日前
松井金網工業株式会社
ふとん籠
9日前
株式会社遠藤工業
地中障害物撤去方法
21日前
日立建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
コベルコ建機株式会社
作業機械
1日前
住友重機械工業株式会社
作業機械
16日前
住友重機械工業株式会社
作業機械
7日前
日立建機株式会社
電動式建設機械
16日前
日立建機株式会社
建設機械
13日前
有限会社Kunioka-ele
ホール用仮設蓋
20日前
ヤンマーホールディングス株式会社
作業機械
20日前
株式会社小松製作所
作業機械
17日前
コベルコ建機株式会社
作業システム
17日前
コベルコ建機株式会社
作業システム
15日前
日立建機株式会社
作業機械
1日前
日立建機株式会社
建設機械
1日前
日立建機株式会社
作業機械
17日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械
16日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
作業機械の報知システム
2日前
日立建機株式会社
作業機械及び遠隔制御装置
7日前
株式会社インバックス
ソイルセメントの製造方法
13日前
株式会社日立建機ティエラ
建設機械
13日前
株式会社日立建機ティエラ
建設機械
13日前
日立建機株式会社
角度検出装置
10日前
株式会社イノアック住環境
法面構造及び廃棄物処分場
7日前
日鉄建材株式会社
鋼製スリットダム
1日前
日立建機株式会社
地形情報管理システム
6日前
株式会社小松製作所
バッテリ駆動式作業機械
8日前
株式会社竹中工務店
埋込金物の設置方法
15日前
住友建機株式会社
ショベル、及びショベルの遠隔操作システム
13日前
第一復建株式会社
転倒堰制御システムと転倒堰制御方法とそのプログラム
13日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ