TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025036838
公報種別
公開特許公報(A)
公開日
2025-03-17
出願番号
2023143420
出願日
2023-09-05
発明の名称
作業システム
出願人
コベルコ建機株式会社
代理人
弁理士法人ATEN
主分類
E02F
3/43 20060101AFI20250310BHJP(水工;基礎;土砂の移送)
要約
【課題】姿勢検出手段の検出値が、姿勢検出手段の検出値の許容範囲外にずれていないか監視することが可能な作業システムを提供する。
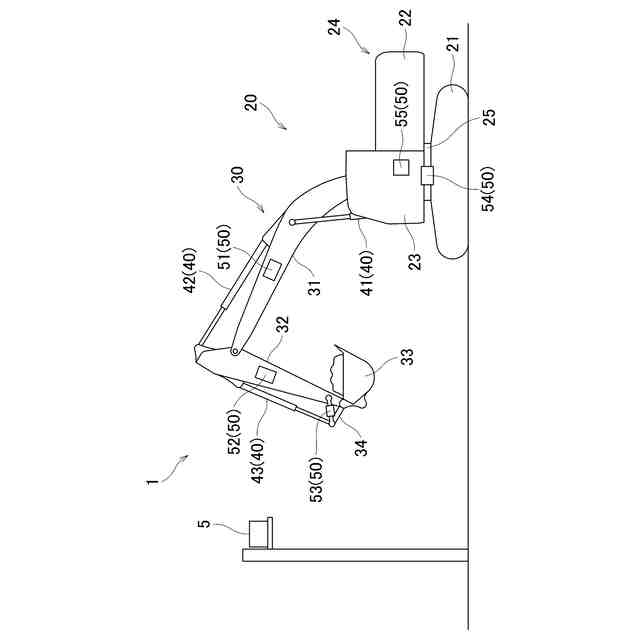
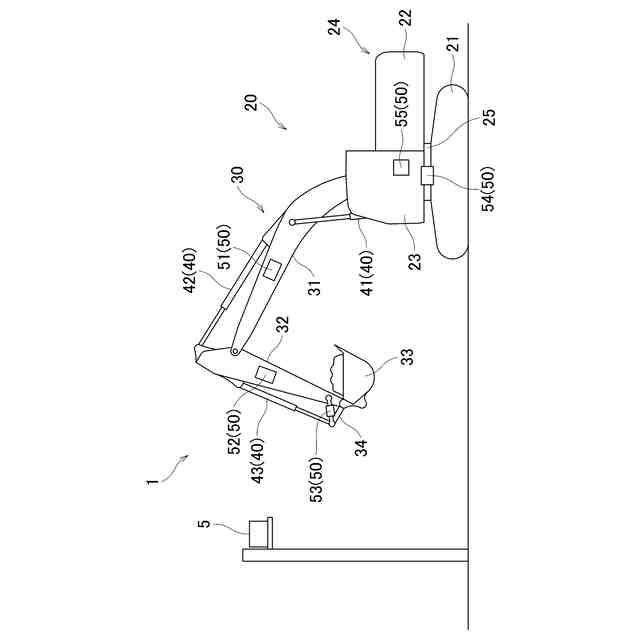
【解決手段】下部走行体21、上部旋回体22、ブーム31、アーム32、および、バケット33の少なくとも1つを検出対象とし、検出対象の姿勢を検出する姿勢検出手段と、検出対象の三次元情報を取得する撮像装置5と、撮像装置5が取得した三次元情報に基づいて、検出対象の姿勢を算出する姿勢算出手段と、姿勢検出手段が検出した姿勢と、姿勢算出手段が算出した姿勢とのずれを算出するずれ算出手段と、を有する。
【選択図】図1
特許請求の範囲
【請求項1】
作業機械を備えた作業システムであって、
下部走行体と、
前記下部走行体の上部に旋回可能に取り付けられた上部旋回体と、
上下方向に回動可能に前記上部旋回体に取り付けられたブームと、
上下方向に回動可能に前記ブームに取り付けられたアームと、
前記アームに回動可能に取り付けられた先端アタッチメントと、
前記下部走行体、前記上部旋回体、前記ブーム、前記アーム、および、前記先端アタッチメントの少なくとも1つを検出対象とし、前記検出対象の姿勢を検出する姿勢検出手段と、
前記検出対象の三次元情報を取得する取得装置と、
前記取得装置が取得した前記三次元情報に基づいて、前記検出対象の姿勢を算出する姿勢算出手段と、
前記姿勢検出手段が検出した前記姿勢と、前記姿勢算出手段が算出した前記姿勢とのずれを算出するずれ算出手段と、
を有することを特徴とする作業システム。
続きを表示(約 660 文字)
【請求項2】
前記姿勢検出手段は、前記ブーム、前記アーム、および、前記先端アタッチメントの各々を前記検出対象とし、水平面に対する前記検出対象の傾斜角度を前記姿勢として検出し、
前記姿勢算出手段は、前記水平面に対する前記検出対象の傾斜角度を前記姿勢として算出することを特徴とする請求項1に記載の作業システム。
【請求項3】
前記姿勢検出手段は、前記上部旋回体を前記検出対象とし、基準線に対する前記検出対象の旋回角度を前記姿勢として検出し、
前記姿勢算出手段は、前記基準線に対する前記検出対象の旋回角度を前記姿勢として算出することを特徴とする請求項1に記載の作業システム。
【請求項4】
前記姿勢検出手段は、前記下部走行体を前記検出対象とし、水平面に対する前記検出対象の傾斜角度を前記姿勢として検出し、
前記姿勢算出手段は、前記水平面に対する前記検出対象の傾斜角度を前記姿勢として算出することを特徴とする請求項1に記載の作業システム。
【請求項5】
前記検出対象に設けられた目印を有し、
前記取得装置は、前記目印の三次元情報を取得することを特徴とする請求項1~4のいずれか1項に記載の作業システム。
【請求項6】
前記検出対象の形状情報を記憶する記憶装置を有し、
前記姿勢算出手段は、前記記憶装置が記憶する前記形状情報を用いて、前記姿勢を算出することを特徴とする請求項1~4のいずれか1項に記載の作業システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、作業機械を備えた作業システムに関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
特許文献1には、現在距離データに基づいて、教示位置データと現在位置データとの位置ずれを判定する自動運転ショベルが開示されている。
【先行技術文献】
【特許文献】
【0003】
特開平10-183671号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、自動運転される作業機械においては、アタッチメントなどの姿勢を検出するセンサの検出値がずれると、作業機械の動作が目標値からずれる。そこで、センサ(姿勢検出手段)の検出値が、センサの検出値の許容範囲外にずれていないか監視できることが望まれる。
【0005】
本発明の目的は、姿勢検出手段の検出値が、姿勢検出手段の検出値の許容範囲外にずれていないか監視することが可能な作業システムを提供することである。
【課題を解決するための手段】
【0006】
本発明は、作業機械を備えた作業システムであって、下部走行体と、前記下部走行体の上部に旋回可能に取り付けられた上部旋回体と、上下方向に回動可能に前記上部旋回体に取り付けられたブームと、上下方向に回動可能に前記ブームに取り付けられたアームと、前記アームに回動可能に取り付けられた先端アタッチメントと、前記下部走行体、前記上部旋回体、前記ブーム、前記アーム、および、前記先端アタッチメントの少なくとも1つを検出対象とし、前記検出対象の姿勢を検出する姿勢検出手段と、前記検出対象の三次元情報を取得する取得装置と、前記取得装置が取得した前記三次元情報に基づいて、前記検出対象の姿勢を算出する姿勢算出手段と、前記姿勢検出手段が検出した前記姿勢と、前記姿勢算出手段が算出した前記姿勢とのずれを算出するずれ算出手段と、を有することを特徴とする。
【発明の効果】
【0007】
本発明によると、姿勢検出手段が検出した姿勢と、三次元情報に基づいて算出された姿勢とのずれが算出される。姿勢検出手段が検出した姿勢と、三次元情報に基づいて算出された姿勢との間のずれの大きさに基づいて、姿勢検出手段の検出値の信ぴょう性を評価することができる。これにより、姿勢検出手段の検出値が、姿勢検出手段の検出値の許容範囲外にずれていないか監視することができる。
【図面の簡単な説明】
【0008】
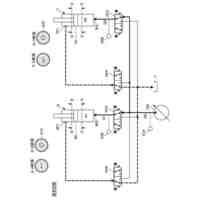
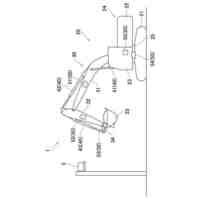
作業システムの構成図である。
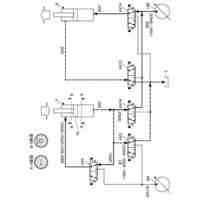
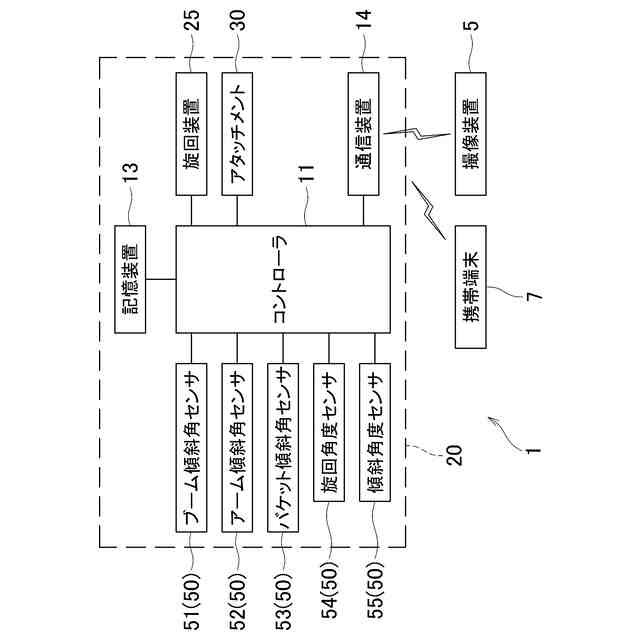
作業システムの機能構成図である。
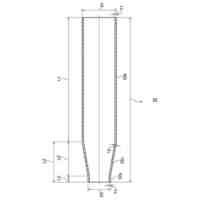
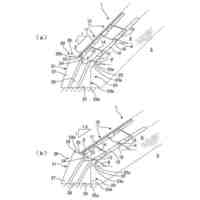
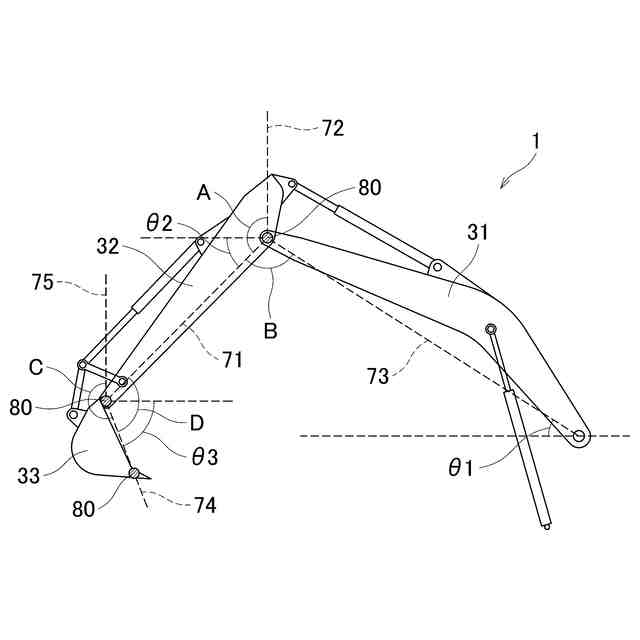
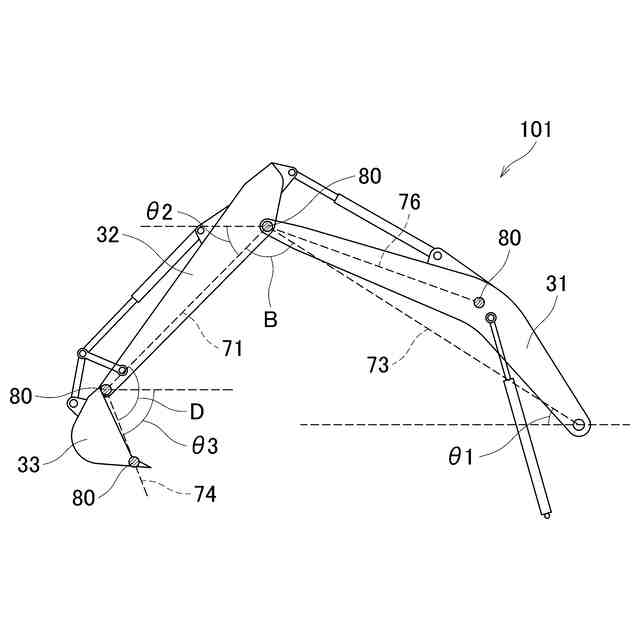
第1実施形態におけるアタッチメントの側面図である。
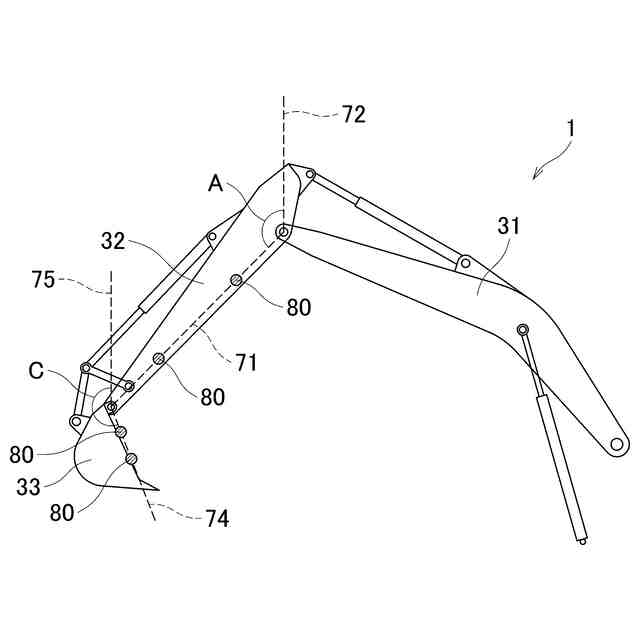
第1実施形態の変形例におけるアタッチメントの側面図である。
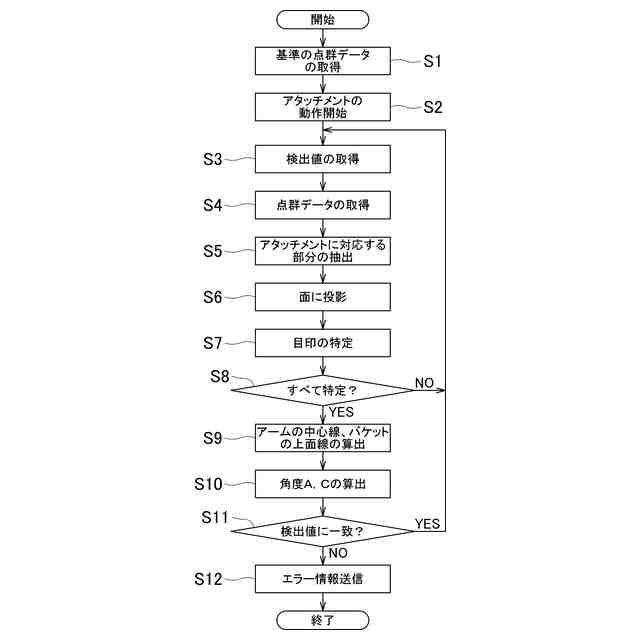
第1実施形態におけるずれ判定処理のフローチャートである。
第2実施形態におけるアタッチメントの側面図である。
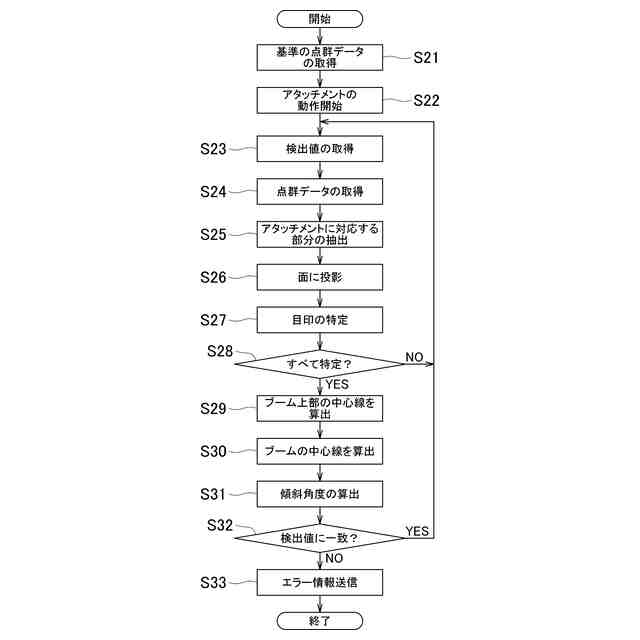
第2実施形態におけるずれ判定処理のフローチャートである。
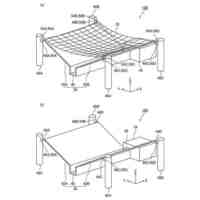
アタッチメントの三次元モデル図である。
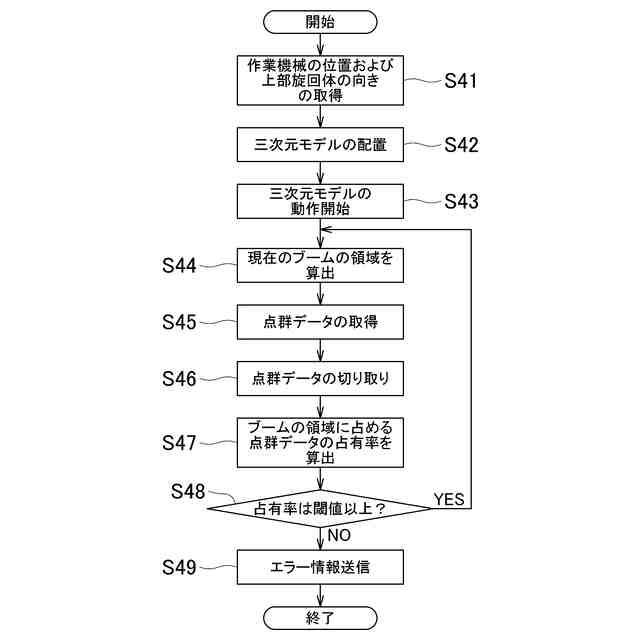
第3実施形態におけるずれ判定処理のフローチャートである。
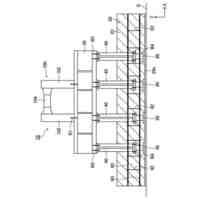
作業機械の上面図である。
第4実施形態におけるずれ判定処理のフローチャートである。
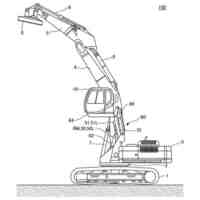
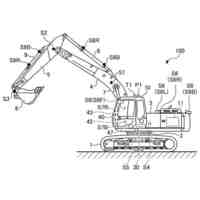
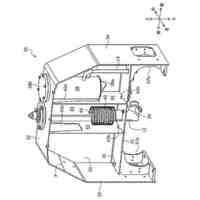
作業機械の斜視図である。
第5実施形態におけるずれ判定処理のフローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の好適な実施の形態について、図面を参照しつつ説明する。
【0010】
[第1実施形態]
(作業システムの構成)
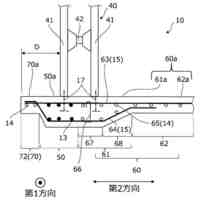
本発明の第1実施形態による作業システムは、作業機械を備える。作業システム1の構成図である図1に示すように、作業機械20は、アタッチメント30で作業を行う機械であり、例えば油圧ショベルである。作業機械20は、下部走行体21と上部旋回体22とを備えた機械本体24と、アタッチメント30と、シリンダ40と、を有している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
砂堆積ネット
4日前
株式会社高橋監理
不同沈下修正機
25日前
株式会社エスイー
防災構造物
6日前
個人
潜水式土運船と土砂降ろし方法
25日前
個人
一種の新型水力発電装置
4日前
ヨシモトポール株式会社
鋼管杭
5日前
住友建機株式会社
作業機械
5日前
大和ハウス工業株式会社
建物
5日前
株式会社大林組
建築物の基礎構造及び方法
11日前
カナデビア株式会社
サクション基礎
25日前
株式会社遠藤工業
地中障害物撤去方法
5日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
ショベル
5日前
住友重機械工業株式会社
作業機械
5日前
株式会社オーイケ
擁壁および基礎ブロック
25日前
埼玉八栄工業株式会社
地盤撹拌装置
18日前
株式会社竹内製作所
作業用車両
11日前
株式会社竹内製作所
作業用車両
15日前
日本国土開発株式会社
堆積物移動装置
1か月前
株式会社竹内製作所
作業用車両
15日前
大和ハウス工業株式会社
建物の支持機構
5日前
鹿島建設株式会社
排水構造体
5日前
株式会社加藤建設
固化材の吐出方法
6日前
有限会社Kunioka-ele
ホール用仮設蓋
4日前
ジャパンパイル株式会社
中空既製杭の吊り下げ装置
6日前
日本車輌製造株式会社
杭打機の制御システム
1か月前
コベルコ建機株式会社
作業システム
1日前
株式会社小松製作所
作業機械
1か月前
株式会社小松製作所
作業機械
1日前
株式会社本久
砂防ソイルセメント材の品質管理方法
15日前
ヤンマーホールディングス株式会社
作業機械
4日前
株式会社CSPホールディングス
杭抜き方法
11日前
日立建機株式会社
建設機械
11日前
日立建機株式会社
建設機械
11日前
日立建機株式会社
作業機械
11日前
日立建機株式会社
作業機械
5日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ