TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025047647
公報種別
公開特許公報(A)
公開日
2025-04-03
出願番号
2023156261
出願日
2023-09-21
発明の名称
作業機械の遠隔操作装置
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
H04N
7/18 20060101AFI20250326BHJP(電気通信技術)
要約
【課題】作業機械を容易に遠隔操作できる遠隔操作装置を得ること。
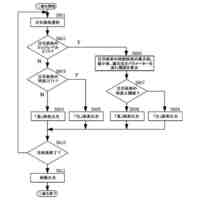
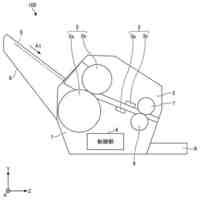
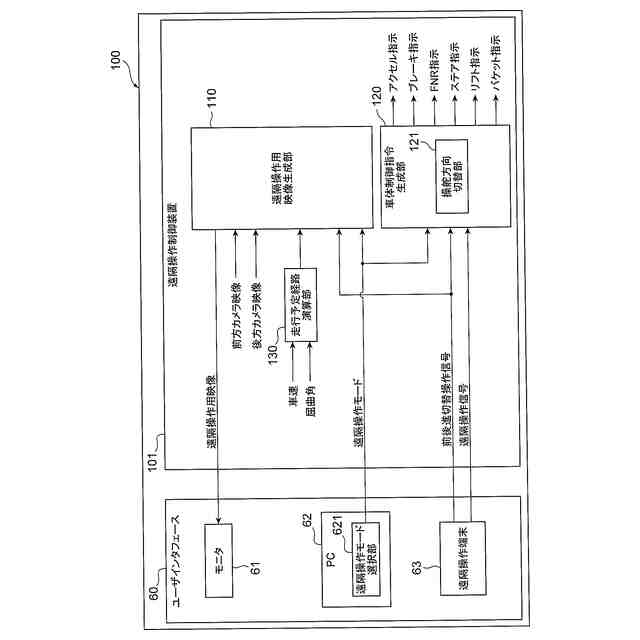
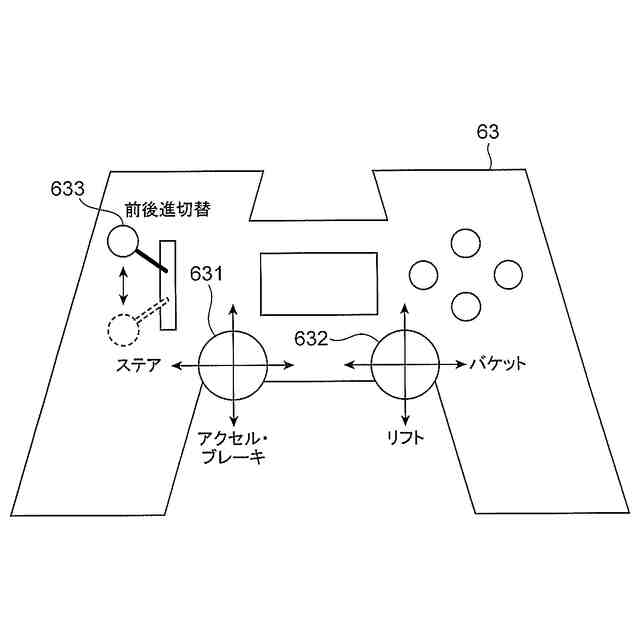
【解決手段】作業機械(V1)の進行方向を撮像した映像から遠隔操作用映像を生成してモニタ(61)に出力し、遠隔操作端末(63)から入力される操作指令に基づいて作業機械を遠隔操作する遠隔操作装置(100)であって、遠隔操作端末から後進指示操作が入力された場合に、モニタに表示される前記作業機械の進行方向を撮像した映像と、遠隔操作端末から入力されるステアリング操作に対する作業機械の操舵方向のいずれか一方を左右反転させる2つの遠隔操作モードを備えることを特徴とする。
【選択図】図7
特許請求の範囲
【請求項1】
作業機械の進行方向を撮像した映像から遠隔操作用映像を生成してモニタに出力し、遠隔操作端末から入力される操作指令に基づいて前記作業機械を遠隔操作する作業機械の遠隔操作装置であって、
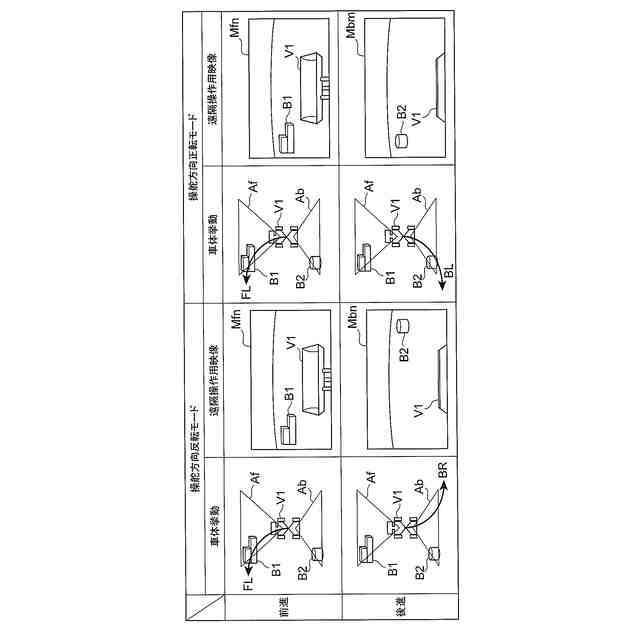
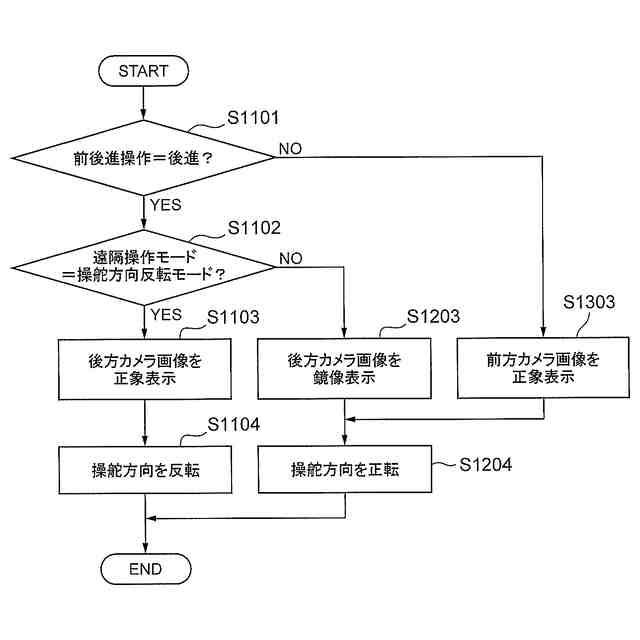
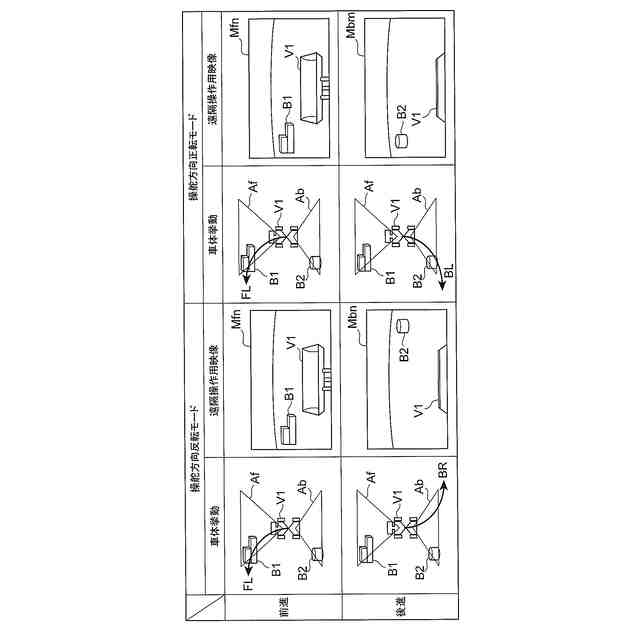
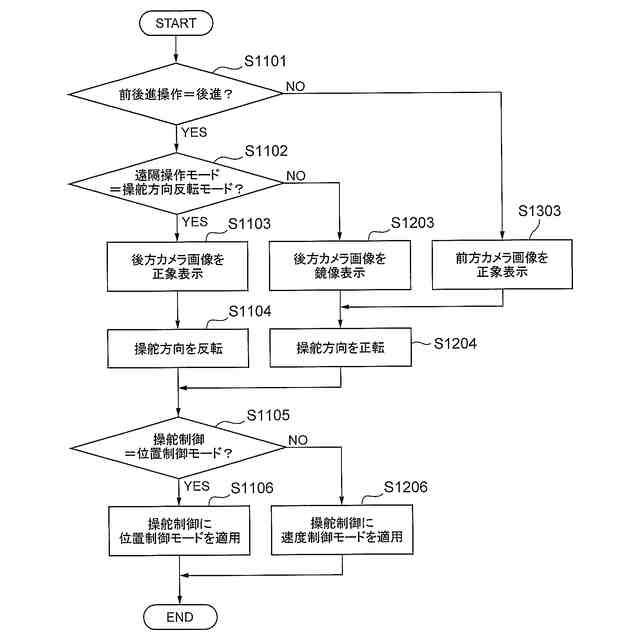
前記遠隔操作端末から後進指示操作が入力された場合に、前記モニタに表示される前記作業機械の進行方向を撮像した映像と、前記遠隔操作端末から入力されるステアリング操作に対する前記作業機械の操舵方向のいずれか一方を左右反転させる2つの遠隔操作モードを備えることを特徴とする作業機械の遠隔操作装置。
続きを表示(約 960 文字)
【請求項2】
前記2つの遠隔操作モードは、
前記操舵方向を正転方向としかつ前記作業機械の進行方向を撮像した映像を左右反転させた鏡像の映像を前記遠隔操作用映像とする第1モードと、
前記操舵方向を左右反転させた反転方向としかつ前記作業機械の進行方向を撮像した映像の正象の映像を前記遠隔操作用映像とする第2モードであることを特徴とする請求項1に記載の作業機械の遠隔操作装置。
【請求項3】
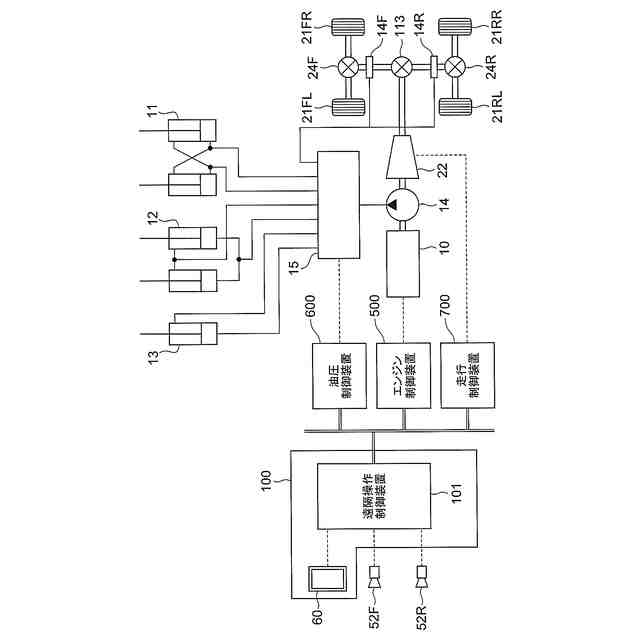
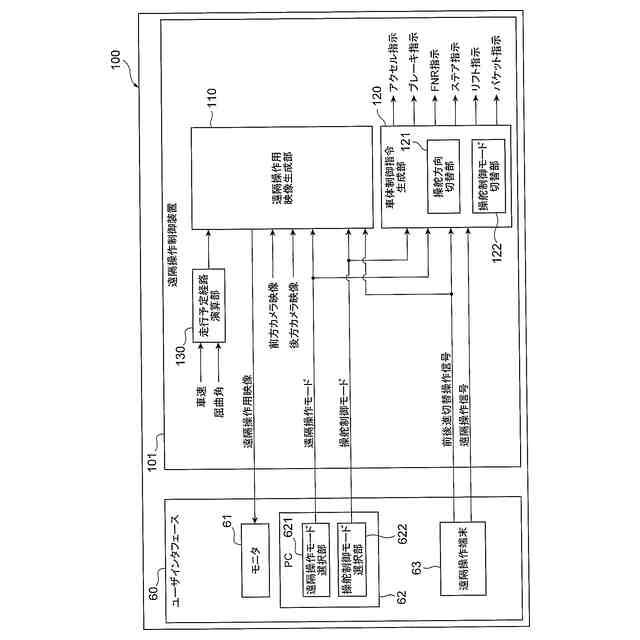
前記遠隔操作用映像を生成する遠隔操作用映像生成部と、
前記作業機械の前記操舵方向を正転方向と反転方向に選択的に切り替える操舵方向切替部と、
を有し、
前記第1モードでは、前記遠隔操作用映像生成部により鏡像となる前記遠隔操作用映像が生成され、前記操舵方向切替部により前記操舵方向として正転方向が選択され、
前記第2モードでは、前記遠隔操作用映像生成部により正象となる前記遠隔操作用映像が生成され、前記操舵方向切替部により前記操舵方向として反転方向が選択されることを特徴とする請求項2に記載の作業機械の遠隔操作装置。
【請求項4】
前記遠隔操作用映像生成部は、前記モニタに走行予定経路を重畳表示させる映像を生成することを特徴とする請求項3に記載の作業機械の遠隔操作装置。
【請求項5】
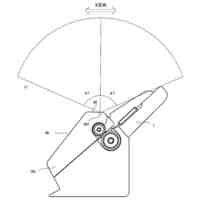
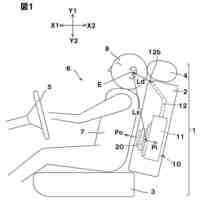
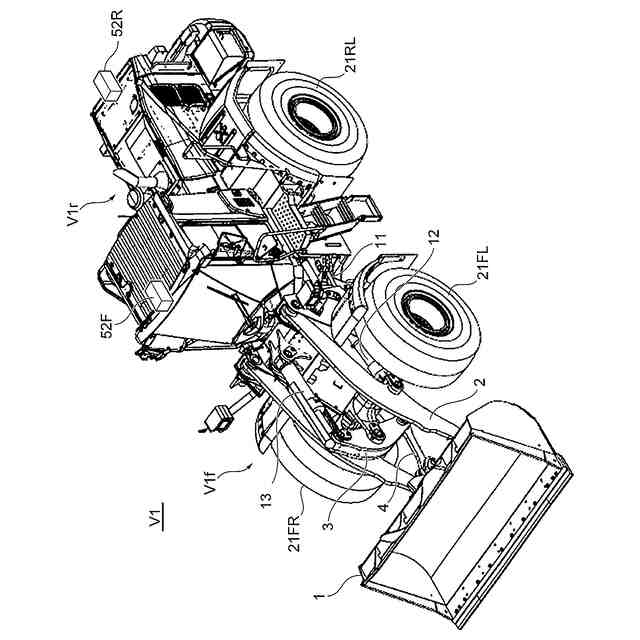
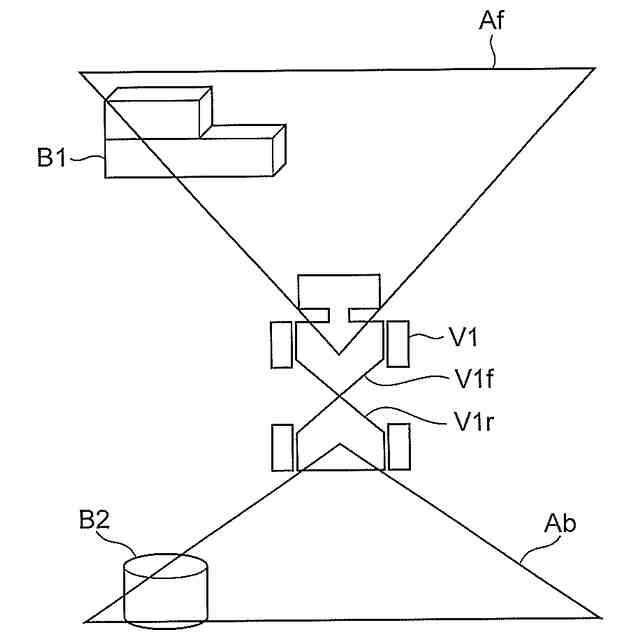
前記作業機械は、前記ステアリング操作に応じて車体前部と車体後部とが左右に屈曲するアーティキュレート型の操舵機構を備えており、
前記作業機械の操舵制御モードとして、前記遠隔操作端末から入力されるステアリング操作量に応じて屈曲角が変化する位置制御モードと、前記ステアリング操作量に応じて屈曲角速度が変化する速度制御モードの2つの操舵制御モードを備えることを特徴とする請求項2に記載の作業機械の遠隔操作装置。
【請求項6】
前記位置制御モードと前記速度制御モードを切り替える操舵制御モード切替部を備え、
該操舵制御モード切替部は、前記遠隔操作モードが前記第2モードの場合に、前記位置制御モードを選択し、前記遠隔操作モードが前記第1モードの場合に、前記速度制御モードを選択することを特徴とする請求項5に記載の作業機械の遠隔操作装置。
発明の詳細な説明
【技術分野】
【0001】
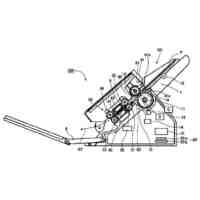
本発明は、ホイールローダなどの作業機械の遠隔操作装置に関し、例えば作業機械に設置されたカメラからの映像に基づきオペレータが遠隔地から作業機械を操作する作業機械の遠隔操作装置に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
溶鉱炉やトンネル掘削など、安全上の理由によりオペレータが作業機械に搭乗できない現場では作業機械を遠隔操作する技術が活用されている。また、最近では省人化による現場の生産性および安全性の向上を目的として、一人のオペレータが遠隔地から複数の作業機械を操作する遠隔操作技術が注目されている。
【0003】
例えば、特許文献1には「自動運転車両を遠隔操縦するための遠隔操縦装置であって、操縦者の操縦を受け付けるように設定された操縦部と、前記自動運転車両とネットワークを介して通信するように設定された通信部と、表示部と、を備え、前記通信部は、前記自動運転車両の周辺状況を示す検知データを受信し、前記表示部は、前記検知データに基づき生成された、前記自動運転車両の周辺の画像を表示し、前記操縦部は、前記操縦者が与えた第1の操縦量を受け付け、前記通信部は、前記第1の操縦量に対する自動運転車両の挙動の感度が、登録されている複数の自動運転車両の間で一定になるように補正された第2の操縦量を含む制御コマンドを送信する、遠隔操縦装置。」が開示されている。
【先行技術文献】
【特許文献】
【0004】
特開2017-037401号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1の技術では、複数の作業機械の操作感度を統一することで遠隔操作する対象を切り替えた際の操作感の違いによる操作しづらさを解消することを目的としている。
【0006】
しかしながら、作業機械周辺の領域の画像情報に基づいて機械を操作する遠隔操作技術をホイールローダのようにステアリング操作によって左右に旋回する作業機械に適用する場合、進行方向によって、画像に対するステアリング操作の方向が変わるため、作業機械の運転に不慣れな人には操作し難い場合がある。
【0007】
具体的には、例えば進行方向に対して左旋回するためのステアリング操作は、前進時と後進時とでその操作方向が逆になる。搭乗操作の場合、後進時の視界はミラーや作業機械後方を撮影するカメラにより左右が反転した鏡像として提供されるため、その問題は生じない。
【0008】
一方で、遠隔操作の場合、オペレータはそもそも自機が前進しているか後進しているか体感的に認識しづらいため、進行方向に応じて画像情報の正象と鏡像とを切り替えて表示すると、かえって誤認識や混乱を招く場合がある。
【0009】
本発明は、上記課題に鑑みてなされたものであり、その目的とするところは、作業機械を容易に遠隔操作できる作業機械の遠隔操作装置を提供することにある。
【課題を解決するための手段】
【0010】
上記課題を解決する本発明の遠隔操作装置は、作業機械の進行方向を撮像した映像から遠隔操作用映像を生成してモニタに出力し、遠隔操作端末から入力される操作指令に基づいて前記作業機械を遠隔操作する作業機械の遠隔操作装置であって、前記遠隔操作端末から後進指示操作が入力された場合に、前記モニタに表示される前記作業機械の進行方向を撮像した映像と、前記遠隔操作端末から入力されるステアリング操作に対する前記作業機械の操舵方向のいずれか一方を左右反転させる2つの遠隔操作モードを備えることを特徴とする。
【発明の効果】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
音声による制御装置
23日前
個人
防犯AIプラグイン
2日前
個人
コメント配信システム
16日前
個人
インターホンシステム
1か月前
個人
電気音響変換装置
12日前
株式会社SEtech
撮像装置
16日前
株式会社奥村組
通信設備
1か月前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
電子機器
1か月前
キヤノン株式会社
撮像装置
23日前
キヤノン株式会社
電子機器
2か月前
日本放送協会
無線通信装置
2日前
オムロン株式会社
通信装置
1か月前
キヤノン電子株式会社
画像処理装置
9日前
キヤノン電子株式会社
画像処理装置
3日前
キヤノン電子株式会社
画像読取装置
1か月前
キヤノン電子株式会社
画像処理装置
24日前
キヤノン電子株式会社
画像読取装置
1か月前
キヤノン電子株式会社
画像読取装置
1か月前
キヤノン株式会社
画像読取装置
1か月前
日本無線株式会社
無線受信装置
1か月前
個人
電子透かし埋め込み及び抽出方法
1か月前
日本放送協会
無線伝送システム
2か月前
船井電機株式会社
表示装置
19日前
株式会社小糸製作所
画像照射装置
2か月前
キヤノン電子株式会社
画像読取システム
1か月前
株式会社Move
イヤホン
2か月前
BoCo株式会社
骨伝導聴音装置
24日前
日本放送協会
送信装置及び受信装置
1か月前
日本放送協会
送信装置及び受信装置
1か月前
個人
共鳴管型スピーカーエンクロージャー
1か月前
株式会社PFU
原稿読取装置
1か月前
株式会社オカムラ
電子機器支持什器
1か月前
個人
海洋のセキュリティーと可視化システム
23日前
アルプスアルパイン株式会社
音響装置
1か月前
シャープ株式会社
頭部装着装置
20日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ