TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025043460
公報種別
公開特許公報(A)
公開日
2025-04-01
出願番号
2023150745
出願日
2023-09-19
発明の名称
作業支援システム
出願人
日立建機株式会社
代理人
弁理士法人開知
主分類
G06Q
50/08 20120101AFI20250325BHJP(計算;計数)
要約
【課題】電池の異常に起因して電動作業機械が停止することを防止しつつ、電動作業機械の作業を適切に支援可能な作業計画を作成する。
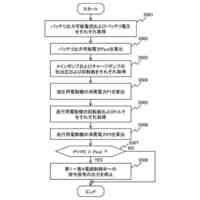
【解決手段】作業支援システムの制御装置は、作業計画にしたがって電動作業機械が動作した場合の電池の電圧、充電率、及び温度の少なくとも一つを含む電池状態パラメータの予測値と、予測作業時間と、電池の予測劣化量とを演算する。制御装置は、電池状態パラメータの予測値に基づいて、電動作業機械が停止するリスクを表すリスク指標を演算する。制御装置は、作業計画に応じた電動作業機械の動作の推定結果の誤差を表す推定誤差指標、及び作業計画に応じた作業における電池の負荷の変動幅を表す負荷変動指標の少なくとも一つに基づいて、リスク指標を補正する。制御装置は、予測作業時間、予測劣化量、及び補正されたリスク指標を含む目的関数の値が所定値以下の場合には、作業計画を出力する。
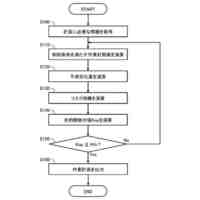
【選択図】図10
特許請求の範囲
【請求項1】
電動作業機械の電池の状態を表す電池状態情報と、作業の内容を表す作業内容情報と、を取得し、
前記電池状態情報及び前記作業内容情報に基づいて、前記電動作業機械の作業計画を演算する制御装置を備えた作業支援システムにおいて、
前記制御装置は、
前記作業計画にしたがって電動作業機械が動作した場合の前記電池の電圧、充電率、及び温度の少なくとも一つを含む電池状態パラメータの予測値と、予測作業時間と、前記電池の予測劣化量と、を演算し、
前記電池状態パラメータの予測値に基づいて、前記電動作業機械が停止するリスクを表すリスク指標を演算し、
前記作業計画に応じた前記電動作業機械の動作の推定結果の誤差を表す推定誤差指標、及び前記作業計画に応じた前記作業における前記電池の負荷の変動幅を表す負荷変動指標の少なくとも一つに基づいて、前記リスク指標を補正した補正リスク指標を演算し、
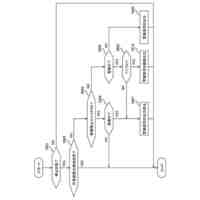
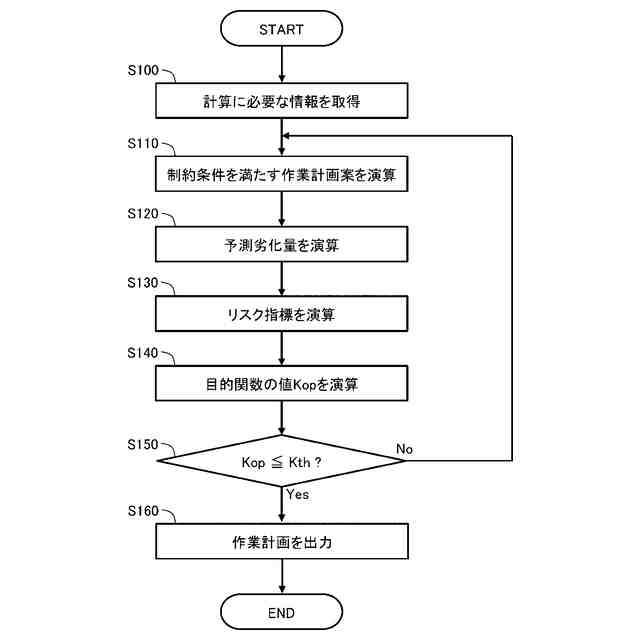
前記予測作業時間、前記予測劣化量、及び前記補正リスク指標を含む目的関数の値が所定値以下であるか否かを判定し、
前記目的関数の値が前記所定値よりも大きい場合には、前記作業計画を再び演算し、
前記目的関数の値が前記所定値以下の場合には、前記作業計画を出力する、
ことを特徴とする作業支援システム。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の作業支援システムにおいて、
前記制御装置は、
前記電池の電圧の予測値を演算し、
演算した前記電圧の予測値と、予め定められている前記電池の下限電圧との差に基づいて、前記電池の電圧の異常低下に起因して前記電動作業機械が停止するリスクを表す電圧異常指標を演算し、
前記電池の充電率の予測値を演算し、
演算した前記充電率の予測値と、予め定められている前記電池の下限充電率との差に基づいて、前記電池の充電率の異常低下に起因して前記電動作業機械が停止するリスクを表す充電率異常指標を演算し、
前記電池の温度の予測値を演算し、
演算した前記温度の予測値と、予め定められている前記電池の上限温度との差に基づいて、前記電池の温度の異常上昇に起因して前記電動作業機械が停止するリスクを表す温度異常指標を演算し、
前記電圧異常指標、前記充電率異常指標、及び前記温度異常指標に基づいて、前記リスク指標を演算する
ことを特徴とする作業支援システム。
【請求項3】
請求項1に記載の作業支援システムにおいて、
前記制御装置は、
前記電動作業機械が前記作業計画にしたがって実際に動作したときの前記電池状態パラメータの実測値を取得し、
取得した前記電池状態パラメータの実測値と、前記電池状態パラメータの予測値とに基づいて、前記推定誤差指標を更新し、
前記補正リスク指標は、前記推定誤差指標に基づいて前記リスク指標を補正して算出される
ことを特徴とする作業支援システム。
【請求項4】
請求項1に記載の作業支援システムにおいて、
前記制御装置は、
前記電動作業機械が前記作業計画にしたがって実際に動作したときの前記電池の負荷の実測値を取得し、
取得した前記電池の負荷の実測値と、前記電池の負荷の予測値とに基いて、前記負荷変動指標を更新し、
前記補正リスク指標は、前記負荷変動指標に基づいて前記リスク指標を補正して算出される
ことを特徴とする作業支援システム。
【請求項5】
請求項1に記載の作業支援システムにおいて、
前記制御装置は、
前記電池状態情報を取得した日時からの経過日時に基づいて、前記リスク指標を補正する
ことを特徴とする作業支援システム。
【請求項6】
請求項1に記載の作業支援システムにおいて、
前記制御装置は、
前記電池状態情報に含まれる前記電池の劣化率に基づいて、前記リスク指標を補正する
ことを特徴とする作業支援システム。
【請求項7】
請求項1に記載の作業支援システムにおいて、
前記目的関数の値は、前記予測作業時間、前記予測劣化量、及び前記補正リスク指標のそれぞれを重み付けした値の総和であり、
前記予測作業時間、前記予測劣化量、及び前記補正リスク指標のそれぞれの重み付けに用いられる定数は、入力装置を用いて変更可能である
ことを特徴とする作業支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動作業機械の作業を支援する作業支援システムに関する。
続きを表示(約 2,800 文字)
【背景技術】
【0002】
脱炭素社会の実現に向け、油圧ショベルなどの作業機械の電動化が加速している。電動作業機械による作業を計画する場合、電池の充電率、電池の劣化等の電池の状態を考慮しながら作業を適切に振り分ける必要がある。特許文献1には、電池を有する複数の移動体の運用計画を作成する運用計画作成装置が開示されている。特許文献1に記載の運用計画作成装置は、移動体の劣化の進み具合のばらつきを抑制するために、運用計画の作成対象期間である計画対象期間より前の一定期間内の移動体の充電回数を用いて、移動体毎に、計画対象期間において移動体が運行する路線を移動体に割当て、割当てた結果を用いて運用計画を作成する。
【先行技術文献】
【特許文献】
【0003】
特開2022-156628号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
電動作業機械に搭載される電池の劣化の進行の度合いは、電動作業機械が行う作業によって異なる。また、電池の劣化の進行の度合いは、電動作業機械の作業時間によっても異なる。このため、作業計画は、作業内容と作業時間を考慮して作成する必要がある。さらに、作業計画を作成する際、電欠などの電池の異常に起因して電動作業機械が停止することなく作業を完了できるかを推定し、停止するリスクが低い電動作業機械に多くの作業を割り当てる必要がある。しかしながら、停止するリスクの推定の精度が低いと、作業を適切に割り当て可能な作業計画を作成できないおそれがある。特許文献1に記載の技術では、電動作業機械が停止するリスクの推定の精度の観点で改善の余地がある。
【0005】
本発明は、電欠などの電池の異常に起因して電動作業機械が停止することを防止しつつ、電動作業機械の作業を適切に支援可能な作業計画を作成する作業支援システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様による作業支援システムは、電動作業機械の電池の状態を表す電池状態情報と、作業の内容を表す作業内容情報と、を取得し、前記電池状態情報及び前記作業内容情報に基づいて、前記電動作業機械の作業計画を演算する制御装置を備えている。前記制御装置は、前記作業計画にしたがって電動作業機械が動作した場合の前記電池の電圧、充電率、及び温度の少なくとも一つを含む電池状態パラメータの予測値と、予測作業時間と、前記電池の予測劣化量と、を演算し、前記電池状態パラメータの予測値に基づいて、前記電動作業機械が停止するリスクを表すリスク指標を演算し、前記作業計画に応じた前記電動作業機械の動作の推定結果の誤差を表す推定誤差指標、及び前記作業計画に応じた前記作業における前記電池の負荷の変動幅を表す負荷変動指標の少なくとも一つに基づいて、前記リスク指標を補正した補正リスク指標を演算し、前記予測作業時間、前記予測劣化量、及び前記補正リスク指標を含む目的関数の値が所定値以下であるか否かを判定し、前記目的関数の値が前記所定値よりも大きい場合には、前記作業計画を再び演算し、前記目的関数の値が前記所定値以下の場合には、前記作業計画を出力する。
【発明の効果】
【0007】
本発明によれば、電欠などの電池の異常に起因して電動作業機械が停止することを防止しつつ、電動作業機械の作業を適切に支援可能な作業計画を作成する作業支援システムを提供することができる。
【図面の簡単な説明】
【0008】
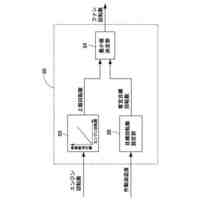
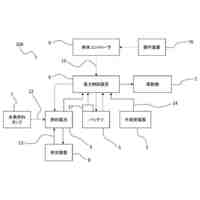
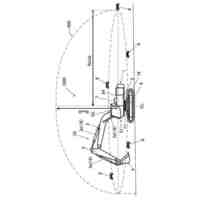
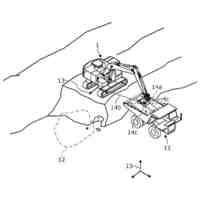
図1は、第1実施形態に係る作業支援システムのシステム構成図である。
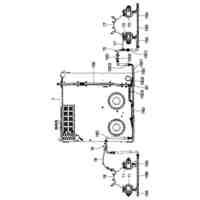
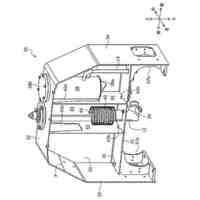
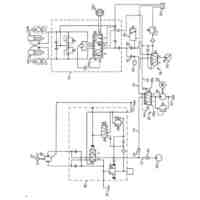
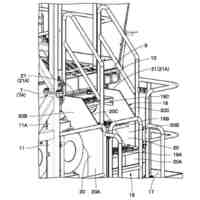
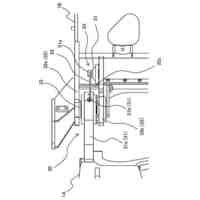
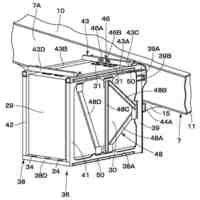
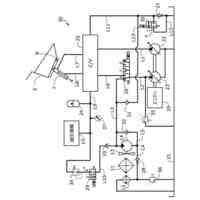
図2は、車両1の車体制御システム50のシステム構成図である。
図3は、第1実施形態に係るサーバ100の機能ブロック図であり、作業計画を作成するための機能を示す。
図4は、最適化計算部101の機能の詳細を示す図である。
図5は、各車両1の電池状態情報を示す図である。
図6は、計画基礎情報を示す図である。
図7は、車両情報記憶部102に記憶されている車両1毎の情報(データ)の一例を示す図である。
図8は、作業情報記憶部103に記憶されている作業毎の情報(データ)の一例を示す図である。
図9は、環境情報記憶部104に記憶されている作業地点毎の情報(データ)の一例を示す図である。
図10は、サーバ100により実行される最適化計算の処理の流れの一例を示すフローチャートである。
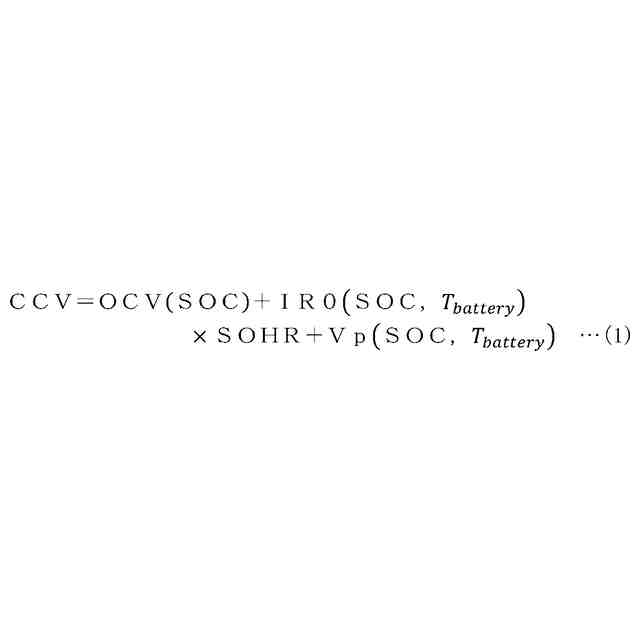
図11は、電池モデルを示す図である。
図12は、ある車両1に対して作成された作業計画案の電圧推移、充電率推移、及び温度推移の演算結果を示す図である。
図13は、作業計画案1及び作業計画案2における各車両1の予測作業時間、予測劣化率及びリスク指標と、作業計画案1及び作業計画案2の目的関数の値について示す図である。
図14は、第2実施形態に係るサーバ200の機能ブロック図であり、作業計画を作成するための機能を示す。
図15は、電池状態パラメータの時系列データの一例を示す図である。
図16は、作業実績情報の一例を示す図である。
図17は、電池状態パラメータ(電圧及び温度)の時間変化を示す図である。
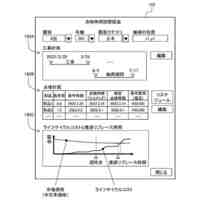
図18は、作業計画情報の一例を示す図である。
図19は、第3実施形態に係る車両情報記憶部102に記憶されている電池状態情報の一例を示す図である。
【発明を実施するための形態】
【0009】
以下、図面等を用いて、本発明の実施形態について説明する。以下の説明は本発明の内容の具体例を示すものであり、本発明がこれらの説明に限定されるものではない。本発明は、本明細書に開示される技術的思想の範囲内において当業者による様々な変更及び修正が可能である。また、本発明を説明するための全図において、同一の機能を有するものは、同一の符号を付け、その繰り返しの説明は省略する場合がある。
【0010】
<第1実施形態>
図1~図13を参照して、本発明の第1実施形態に係る作業支援システムについて説明する。作業支援システムは、複数の電動作業機械1により行われる作業のスケジュール(以下、作業計画とも記す)を作成し、複数の電動作業機械1の作業を支援するシステムである。図1は、第1実施形態に係る作業支援システムのシステム構成図である。以下、図1に示すように、電動作業機械(以下、車両とも記す)1が3台存在している場合を例に、作業支援システムの構成及び機能について詳しく説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業機械
19日前
日立建機株式会社
建設機械
29日前
日立建機株式会社
作業機械
18日前
日立建機株式会社
建設機械
15日前
日立建機株式会社
作業機械
23日前
日立建機株式会社
作業機械
12日前
日立建機株式会社
作業機械
29日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
転圧機械
4日前
日立建機株式会社
作業機械
4日前
日立建機株式会社
転圧機械
4日前
日立建機株式会社
作業機械
3日前
日立建機株式会社
作業機械
2日前
日立建機株式会社
建設機械
29日前
日立建機株式会社
建設機械
3日前
日立建機株式会社
作業機械
3日前
日立建機株式会社
油圧駆動装置
3日前
日立建機株式会社
角度検出装置
12日前
日立建機株式会社
電動式作業車両
1日前
日立建機株式会社
ダンプトラック
3日前
日立建機株式会社
ホイールローダ
2日前
日立建機株式会社
電動式建設機械
18日前
日立建機株式会社
ダンプトラック
3日前
日立建機株式会社
ダンプトラック
19日前
日立建機株式会社
ダンプトラック
1日前
日立建機株式会社
作業支援システム
4日前
日立建機株式会社
エンジン診断装置
15日前
日立建機株式会社
走行用アクスル装置
23日前
日立建機株式会社
施工情報管理システム
29日前
日立建機株式会社
地形情報管理システム
8日前
日立建機株式会社
施工情報管理システム
23日前
日立建機株式会社
点検計画作成支援装置
15日前
日立建機株式会社
作業機械の報知システム
4日前
日立建機株式会社
作業機械の遠隔操作装置
2日前
日立建機株式会社
作業機械及び遠隔制御装置
9日前
日立建機株式会社
建設機械のバケット用ツース
29日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ