TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025012392
公報種別
公開特許公報(A)
公開日
2025-01-24
出願番号
2023115188
出願日
2023-07-13
発明の名称
水中沈殿物回収システム
出願人
東京電力ホールディングス株式会社
代理人
個人
,
個人
主分類
E02F
3/88 20060101AFI20250117BHJP(水工;基礎;土砂の移送)
要約
【課題】ホースがロボットの移動を妨げることがなく、且つロボットがホースを引きながら移動する際の負荷を軽減することが可能な水中沈殿物回収システムおよび水中沈殿物回収方法を提供することを目的とする。
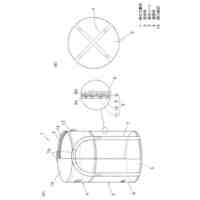
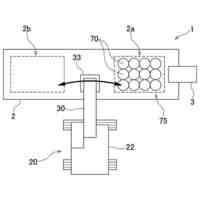
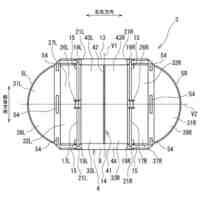
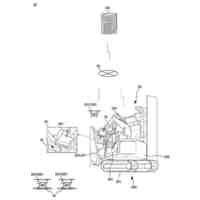
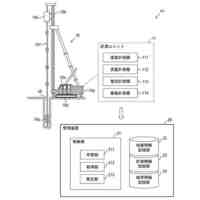
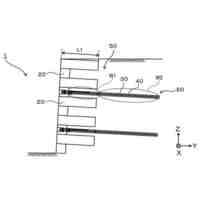
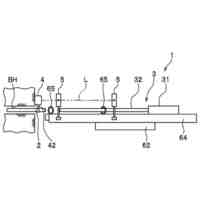
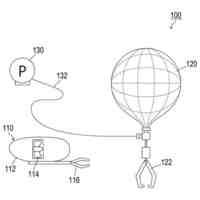
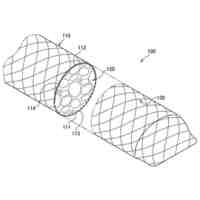
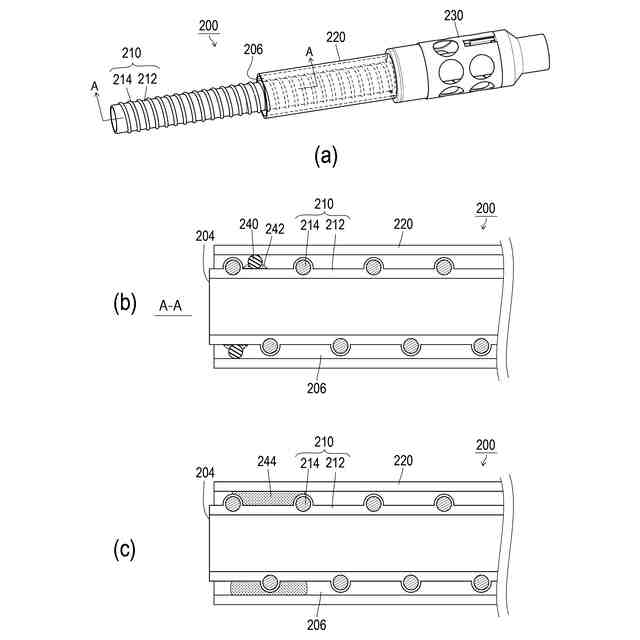
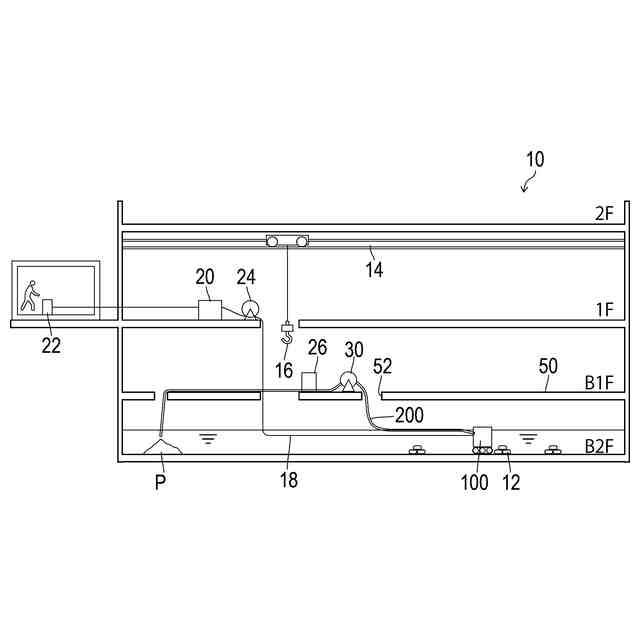
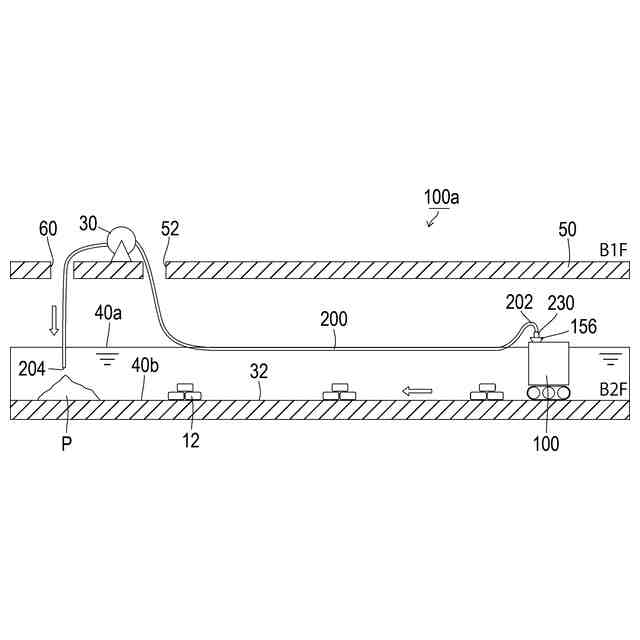
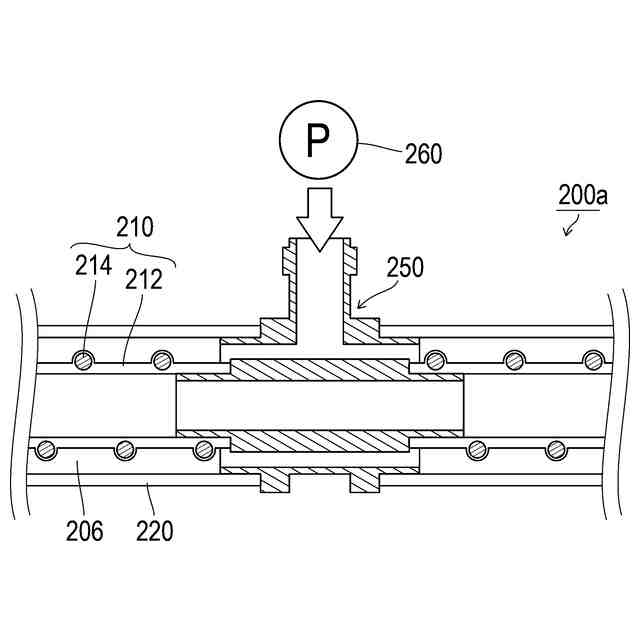
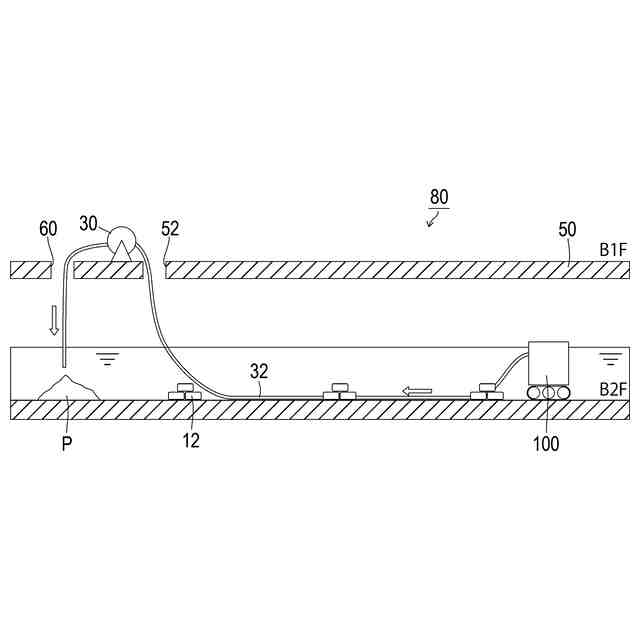
【解決手段】本発明にかかる水中沈殿物回収システムの構成は、浸水したフロアの沈殿物を回収して集積する水中沈殿物回収システム(回収システム100a)であって、浸水したフロアを走行して沈殿物を吸引するロボット100と、浸水したフロアの上階の床に形成された回収穴52と、内管210を芯材補強ホースとし外管220をゴムホースとする二重ホース200と、を備え、二重ホース200は、一端202がロボット100に連結され、回収穴52に通されて、他端204が沈殿物の集積場所に配置されていることを特徴とする。
【選択図】図5
特許請求の範囲
【請求項1】
浸水したフロアの沈殿物を回収して集積する水中沈殿物回収システムであって、
前記浸水したフロアを走行して前記沈殿物を吸引するロボットと、
前記浸水したフロアの上階の床に形成された回収穴と、
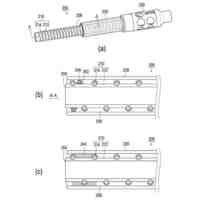
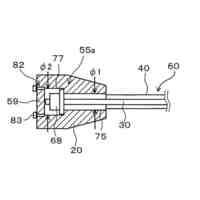
内管を芯材補強ホースとし外管をゴムホースとする二重ホースと、
を備え、
前記二重ホースは、一端が前記ロボットに連結され、前記回収穴に通されて、他端が前記沈殿物の集積場所に配置されていることを特徴とする水中沈殿物回収システム。
続きを表示(約 190 文字)
【請求項2】
前記二重ホースは、一端および他端において前記内管と前記外管の間が封止されて空気が封入されていることを特徴とする請求項1に記載の水中沈殿物回収システム。
【請求項3】
前記二重ホースに接続されるポンプを備え、
前記ポンプから前記二重ホースの内管と外管の間に空気が供給されることを特徴とする請求項1に記載の水中沈殿物回収システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、浸水したフロアの沈殿物を回収して集積する水中沈殿物回収システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
従来から、水質汚染を防止するためや、水中に沈殿している有害物を除去するために、水中に沈殿している沈殿物を回収することが行われている。沈殿物を回収する手段としては、例えば特許文献1に汚泥回収装置および方法が開示されている。特許文献1の汚泥回収装置は、水中を移動可能であると共に水底の汚泥を吸引して回収可能な浚渫装置と、水中を移動可能であると共に浚渫装置により回収された汚泥から水分を除去した回収物を回収物受槽に貯蔵する処理装置と、処理装置に電力や高圧空気などを供給する設備車とを有している。
【0003】
ところで、例えば原子力発電所建屋では、水中の放射線量を低減するために、放射線物質を吸着する吸着材(例えばゼオライト)を袋に収納した土嚢を水中に載置することがある。この土嚢の内容物を回収する場合、内容物が土嚢に収容されたままであると、特許文献1の汚泥回収装置では、沈殿物を回収することができない。
【0004】
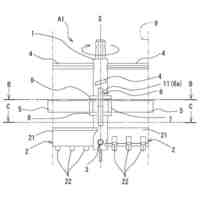
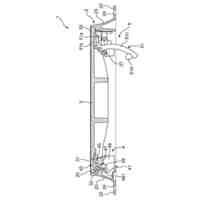
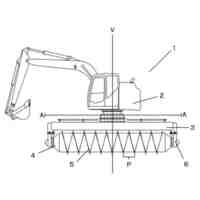
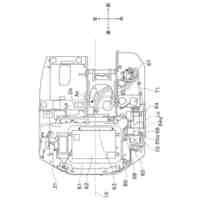
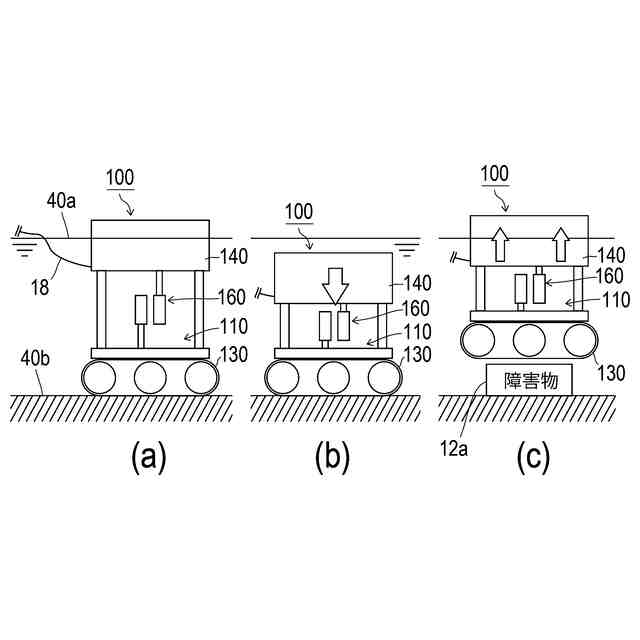
そこで発明者らは、「水中を走行可能なロボット本体と、ロボット本体に対して装着されたコンテナと、ロボット本体に搭載されコンテナを通じて沈殿物を吸引する内蔵ポンプと、ロボット本体の下部の前方に縦向きに軸支され自由回転可能なチップソーとを備えた」水中沈殿物回収ロボットを開発した(特許文献2)。
【0005】
特許文献2の水中沈殿物回収ロボットによれば、チップソーを押し当ててロボット本体が左右に回転運動することで土嚢の袋を破き、土嚢から流出した内容物をロボット本体の内蔵ポンプによって吸引して回収することができる。したがって、内容物が土嚢に収容された状態であっても内容物を効率的に回収することができ、沈殿物の回収作業を迅速に行うことが可能である。
【先行技術文献】
【特許文献】
【0006】
特開2014-125754号公報
特開2022―147083号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
発明者らは、特許文献2の水中沈殿物回収ロボット(以下、ロボットと称する)のコンテナに貯留された沈殿物の回収方法について検討した。詳細には、「沈殿物をコンテナ内に貯留した状態のロボットを集積場所まで移動し、ロボットからコンテナを取り外す。そしてコンテナの内部の沈殿物を集積場所に放出する。その後、集積場所に設置された吸引装置とロボットとを連結し、吸引装置によってコンテナ内のゼオライトを吸い上げる。」という運用方法を検討した。
【0008】
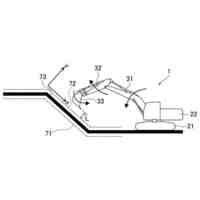
さらに、発明者らは、現地状況に応じて様々な回収方法を適用できるように、ロボットによって回収した沈殿物を、コンテナに貯留せずに、直接集積場所に移送する運用方法について検討を行った。この場合、ロボットに連結したホースの吐出口を集積場所に配置して沈殿物を移送することになる。しかし、沈殿物はフロアの広い範囲に散在しているため、ホースの長さは最大で50m以上の長さになることがある。すると、ロボットはホースを引っ張りながら移動することになり、ロボットの移動にかかる負荷が大きくなってしまう。
【0009】
またホースには、沈殿物を吸引する際の吸引圧力や、沈殿物を移送したりする際の吐出圧力に耐え得る耐圧性が求められる。このため、耐圧性が高い芯材補強ホースを用いることを検討した。しかしながら、芯材補強ホースは外面に凹凸を有するため、ロボットが走行するフロアに壁が存在した場合に芯材補強ホースの凹凸に引っかかってしまうことがある。すると、ホースがロボット移動の妨げになってしまう。
【0010】
本発明は、このような課題に鑑み、ホースがロボットの移動を妨げることがなく、且つロボットがホースを引きながら移動する際の負荷を軽減することが可能な水中沈殿物回収システムおよび水中沈殿物回収方法を提供することを目的としている。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社クボタ
作業機
6日前
鹿島建設株式会社
漂流物の捕捉構造
6日前
日立建機株式会社
作業機械
8日前
日本車輌製造株式会社
アースドリル
今日
日本植生株式会社
緑化土嚢袋
6日前
有限会社 櫂設計事務所
掘削・撹拌具
6日前
日之出水道機器株式会社
地下構造物用蓋
6日前
コベルコ建機株式会社
作業機械
7日前
コベルコ建機株式会社
作業システム
6日前
個人
ローラー転圧装置を備えた油圧ショベル
今日
井関農機株式会社
作業車両
7日前
株式会社地盤リスク研究所
盛土安定化工法、及び盛土構造
10日前
コベルコ建機株式会社
建設機械
9日前
株式会社高知丸高
水陸両用浚渫機
今日
東洋建設株式会社
捨石投入装置
6日前
東京電力ホールディングス株式会社
水中沈殿物回収システム
6日前
東京応化工業株式会社
構造体、及び海洋生物の付着防止方法
6日前
株式会社パルパルス
棒体、棒体の連結装置および環境保全資材連結体
6日前
コベルコ建機株式会社
撮影システム
6日前
株式会社小松製作所
電動式作業機械
今日
株式会社小松製作所
電動式作業機械
今日
岡部株式会社
石積擁壁の補強部材の施工方法
6日前
中国海洋大学
海底横方向探査導入装置及び導入方法
今日
株式会社アイチコーポレーション
把持式作業車
今日
三谷セキサン株式会社
束ね基礎杭構造の構成方法
6日前
株式会社大林組
評価支援装置、評価支援方法及び評価支援プログラム
6日前
コベルコ建機株式会社
作業機械および飛行体
6日前
岡部株式会社
石積擁壁の補強構造及びその施工方法
6日前
清水建設株式会社
トランジションピースのない風車基礎の施工方法
今日
株式会社ソイルリサイクル工業
篩装置及び篩システム
6日前
大成建設株式会社
湧水観測装置および湧水観測方法
今日
旭化成建材株式会社
杭とその施工方法、施工機器および施工具
7日前
国立大学法人東海国立大学機構
構造材
6日前
株式会社タケウチ建設
地盤改良体、及び地盤改良体の施工方法
6日前
東京電力ホールディングス株式会社
水中物体移動システムおよび水中物体移動方法
6日前
日新産業株式会社
流速軽減袋、マットおよび斜面土壌の保護方法
今日
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ