TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025014982
公報種別
公開特許公報(A)
公開日
2025-01-30
出願番号
2023118005
出願日
2023-07-20
発明の名称
把持式作業車
出願人
株式会社アイチコーポレーション
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
E02D
11/00 20060101AFI20250123BHJP(水工;基礎;土砂の移送)
要約
【課題】電柱を建柱穴に建て入れる作業を、作業効率を低下させることなく、且つ正確に位置決めして行えるようにする。
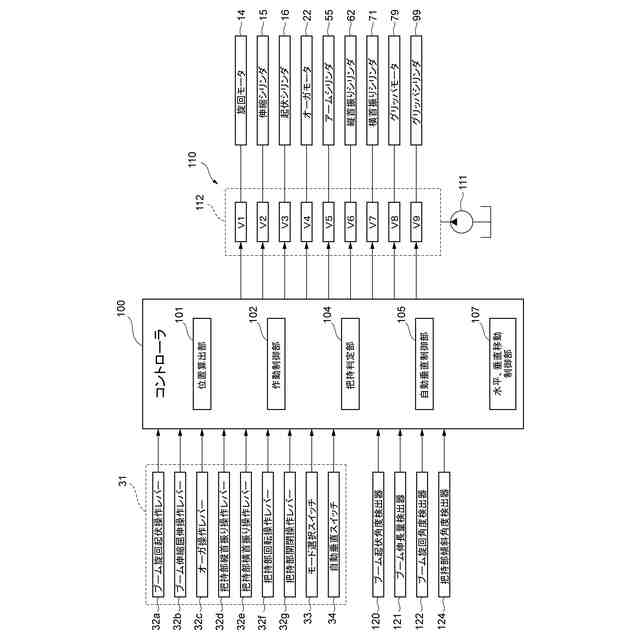
【解決手段】把持式穴掘建柱車は、車体上に旋回動、起伏動および伸縮動可能に設けられたブームと、把持部と、ブームの先端部に対する把持部の姿勢を変化させる支持機構(アーム等)と、ブームおよび支持機構を作動させる複数のアクチュエータ(旋回モータ14、伸縮シリンダ15、起伏シリンダ16等)と、ブーム起伏角度検出器120およびブーム伸長量検出器121と、把持部を水平もしくは垂直移動させるための移動指令を出力する操作装置(ブーム旋回起伏操作レバー32a、ブーム伸縮屈伸操作レバー32b)と、モード設定装置と、設定されたモードで把持部を水平もしくは垂直移動させる制御を行うコントローラ100を備える。
【選択図】図10
特許請求の範囲
【請求項1】
車体と、前記車体上に旋回動、起伏動および伸縮動可能に設けられたブームと、把持対象物を把持することが可能な把持部と、前記ブームの先端部と前記把持部との間に設けられて前記ブームの先端部に対する前記把持部の姿勢を変化させる支持機構と、を備えて構成される把持式作業車であって、
前記ブームおよび前記支持機構を作動させる複数のアクチュエータと、
前記ブームの起伏角を検出するブーム起伏角度検出器および前記ブームの伸縮長さを検出するブーム伸長量検出器と、
操作に応じて前記把持部を水平もしくは垂直移動させるための移動指令を出力する操作装置と、
前記操作装置からの前記移動指令に基づいて前記把持部を水平もしくは垂直移動させるためのモードとして移動速度指令モードおよび移動精度向上モードを選択設定可能なモード設定装置と、
前記モード設定装置により前記移動速度指令モードが設定されたときには、前記操作装置からの前記移動指令に基づいて前記移動速度指令モードの下で前記把持部を水平もしくは垂直移動させ、前記モード設定装置により前記移動精度向上モードが設定されたときには、前記操作装置からの前記移動指令に基づいて前記移動精度向上モードの下で前記把持部を水平もしくは垂直移動させる制御を行う制御装置と、を備え、
前記移動速度指令モードにおいて、前記制御装置により前記把持部を水平もしくは垂直移動させる制御は、
前記操作装置からの前記移動指令に対応して求められる前記把持部の目標水平移動方向および目標水平移動速度または目標垂直移動方向および目標垂直移動速度を前記ブームの起伏動および伸縮動の作動に分解して目標起伏方向及び目標起伏速度並びに目標伸縮方向および目標伸縮速度を求め、
前記目標起伏方向及び前記目標起伏速度で前記ブームを起伏動させる制御および前記目標伸縮方向および前記目標伸縮速度で前記ブームを伸縮動させる制御を組み合わせて行いながら、前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、
このように位置を求めた前記把持部が、前記目標水平移動方向または前記目標垂直移動方向に向かって前記目標水平移動速度または前記目標垂直移動速度で移動するように前記ブームの目標起伏速度および目標伸縮速度を補正しながら制御するように構成され、
前記移動精度向上モードにおいて、前記制御装置により前記把持部を垂直移動させる制御は、
前記操作装置からの垂直移動指令に基づいて、前記操作装置の操作に応じて前記ブームを起伏動させる制御を行うとともに、このようにして前記ブームが起伏動するのに応じて前記把持部が垂直移動するように前記ブームを伸縮動させる制御を合わせて行い、
前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、このように位置を求めた前記把持部が垂直移動するように前記ブームの目標伸縮速度を補正する制御を行うように構成されたことを特徴とする把持式作業車。
続きを表示(約 1,000 文字)
【請求項2】
前記制御装置は、前記移動精度向上モードにおいて、前記把持部を水平移動させる制御も行うように構成され、
前記水平移動させる制御は、
前記操作装置からの水平移動指令に基づいて、前記ブームを伸縮動させる制御を行うとともに、このようにして前記ブームが伸縮動するのに応じて前記把持部が水平移動するように前記ブームを起伏動させる制御を合わせて行い、
前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、このように位置を求めた前記把持部が水平移動するように前記ブームの目標起伏速度を補正する制御を行うことを特徴とする請求項1に記載の把持式作業車。
【請求項3】
前記把持対象物が電柱等の柱状物であり、
前記把持部により前記柱状物を把持するときにおいて、前記把持部に対する前記柱状物の延びる方向の角度を検出する柱状物把持角度検出器を備え、
前記制御装置は、前記柱状物把持角度検出器により検出した角度を前記所定条件として、前記移動速度指令モードでの制御と前記移動精度向上モードでの制御とを自動的に切換可能であることを特徴とする請求項1または2に記載の把持式作業車。
【請求項4】
前記把持部は、前記柱状物を把持するための開閉可能な一対の把持爪を有し、
前記支持機構は、前記把持爪をその開閉方向と直交する回転軸周りに回転動させる回転機構を有し、
前記回転機構により前記把持爪を回転させて、前記把持爪により把持した前記柱状物の保持する角度を調整可能であり、
前記柱状物把持角度検出は、前記把持爪により把持した前記柱状物の保持する角度を検出可能であり、
前記制御装置は、前記柱状物把持角度検出により検出された角度を前記所定条件として、前記移動速度指令モードでの制御と前記移動精度向上モードでの制御とを自動的に切換可能であることを特徴とする請求項3に記載の把持式作業車。
【請求項5】
前記制御装置は、前記柱状物把持角度検出により、前記把持部により把持した前記柱状物が垂直方向を含む所定角度範囲内の角度で延びて保持されていると検出されるときには前記移動精度向上モードでの制御に切り換え、
前記柱状物把持角度検出により、前記把持部により把持した前記柱状物が前記所定角度範囲外の角度で延びて保持されていると検出されるときには前記移動速度指令モードでの制御に切り換えることを特徴とする請求項3に記載の把持式作業車。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電柱等の柱状物を把持して建柱作業を行うことなどに用いられる把持式作業車に関する。
続きを表示(約 4,400 文字)
【背景技術】
【0002】
把持式作業車の一例として、車体上に旋回動自在に設けられた旋回台と、旋回台に起伏動および伸縮動自在に設けられたブームと、ブームに装着されて電柱を建て入れるための建柱穴を掘削するオーガ装置と、ブームの先端部に設けられて電柱などの柱状物を把持する把持装置とを備えた把持式の穴掘建柱車が知られている(例えば、特許文献1を参照)。穴掘建柱車を用いて地面に建柱穴を掘削する際には、オーガ装置をブームの先端部から吊り下げた状態でブームを適宜作動させ、オーガ装置を所定の掘削位置で回転動させることで、所定の深さの建柱穴を形成することができる。建柱穴の掘削が終了した後は、オーガ装置を引き上げてブームの側面に格納するとともに、ブームの先端部に設けられた把持装置により電柱を把持し、電柱を把持した状態でブームを適宜作動させることで上記掘削された建柱穴に当該電柱を直接建て入れることができるようになっている。このような把持装置を備えた穴堀建柱車では、電柱をウィンチやクレーンなどを用いて吊り下げて作業を行う場合と比べて、一連の建柱作業を効率的に行うことができる。なお、オーガ装置を備えないで把持装置のみを備えた作業車も存在するため、これらを総称して把持式作業車と称して説明する。
【先行技術文献】
【特許文献】
【0003】
特開平2‐81892号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
このような把持式作業車を用いて建柱作業を行う際には、上述のようにブームの先端部に設けられた把持装置により電柱を把持し、電柱を把持した状態でブームを作動させ、把持した電柱を掘削された建柱穴の上まで搬送し、この電柱を建柱穴内に建て入れる作業が行われる。このときに、ブームの旋回、起伏、伸縮動を組み合わせてブームの先端の把持装置を水平、垂直方向に移動させる水平・垂直移動モードでの制御が行われることがある。垂直移動モードでの制御は、ブームの起伏角度検出センサおよび伸長量検出センサからの検出値に基づいてブームの先端の位置(把持装置の位置)を求め、このブームの先端位置(把持装置の位置)が垂直に延びる目標移動ラインに沿って移動するように、起伏および伸縮動制御を行う。また、水平移動モードでの制御は、起伏角度検出センサおよび伸長量検出センサからの検出値に加え、必要に応じてブームの旋回角度検出センサからの検出値にも基づいてブームの先端の位置(把持装置の位置)を求め、このブームの先端位置(把持装置の位置)が水平方向に設定された目標移動ラインに沿って移動するように、旋回、起伏および伸縮動制御を組み合わせて行う。なお、ブーム起伏面内においてブームの先端を水平移動させる制御もあり、この場合には、ブームの起伏および伸縮動制御を組み合わせて行う。
【0005】
この場合において、センサの検出精度、センサ検出値に対するブームの作動制御の応答遅れや、ブームの作動応答遅れ等を要因として、ブーム先端の実際の移動軌跡が目標移動ラインに対してバラつく(変動する)という問題がある。特に、ブームの旋回、起伏および伸縮動は、例えば、旋回用油圧モータ、起伏用油圧シリンダおよび伸縮用油圧シリンダを駆動して行われ、これら油圧モータ、油圧シリンダへの作動油供給を油圧制御バルブに
より行っているため、油圧モータ、油圧シリンダの作動指令に対して作動応答遅れが生じるのは実際上では不可避である。また、センサ検出値の検出精度の粗さや検出誤差も不可避であり、それに基づく電気的な制御精度の低下が生じるのが避けられない。このようにブーム先端(把持装置)の実際の移動軌跡が目標移動ラインに対してバラつく(変動する)という問題があるため、水平・垂直移動モードでの制御においては、目標移動ラインを中心として円筒状に延びる変動許容領域を設定し、この変動許容領域内での実際の移動軌跡のバラツキ(変動)は許容する水平・垂直移動モードでの制御が行われている。
【0006】
実際の移動軌跡が目標移動ラインに対してバラつく(変動する)という問題は、センサ検出値に対するブームの作動制御の応答遅れや、油圧モータ、油圧シリンダの作動指令に対する作動応答遅れにより生じるものであるため、ブームの先端を水平・垂直移動させる速度の影響を受ける。具体的には、ブームの先端を速い速度で水平・垂直移動させる制御を行うと、移動軌跡が目標移動ラインに対して大きくバラつく(変動する)ことになり、遅い速度で水平・垂直移動させる制御を行うと、目標移動ラインに対する移動軌跡のバラつき(変動)を小さくできる。しかしながら、実際には、ブームの先端を水平・垂直移動させる速度が遅いと作業効率が低下するため、ある程度の大きさの変動許容領域を設定し、水平・垂直移動速度を確保するという制御が行われている。
【0007】
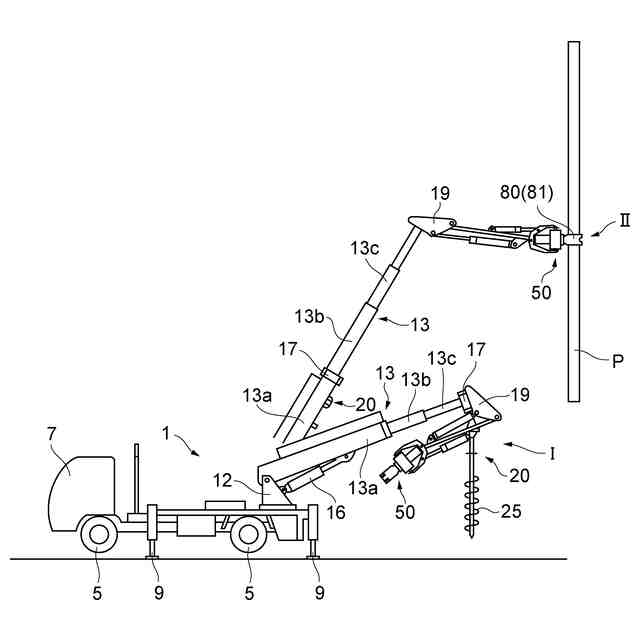
ところで、把持式作業車を用いて建柱作業を行う際には、ブームの先端部に設けられた把持部により電柱を把持し、電柱を把持した状態でブームの先端(把持部)を水平移動させて把持した電柱を掘削された建柱穴の上まで搬送し、電柱を垂直に延びるように把持姿勢を変更した後、この電柱を建柱穴内に建て入れる作業が行われる。このとき、建柱穴の径(約450mm)と、この建柱穴に挿入される電柱の径(約390mm)との差が小さいため、水平・垂直移動モードでの制御における変動許容領域がこの差より大きいと、建柱穴の位置に対して電柱の位置のズレが大きくなって電柱を建柱穴内に建て入れる作業が難しくなるという問題がある。
【0008】
本発明は、このような問題に鑑みてなされたものであり、電柱のような柱状物を把持して建柱穴の上まで搬送し、この電柱を建柱穴に建て入れる作業を、作業効率を低下することなく、且つ正確に位置決めして建柱することが可能となる把持式作業車を提供することを目的とする。
【課題を解決するための手段】
【0009】
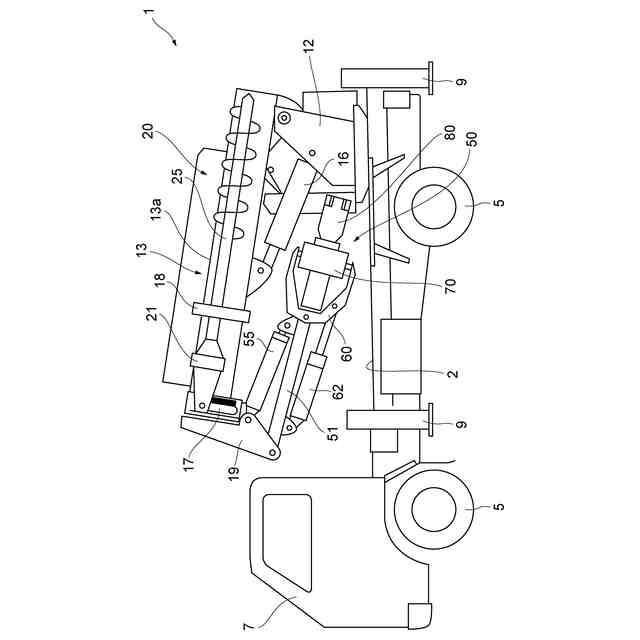
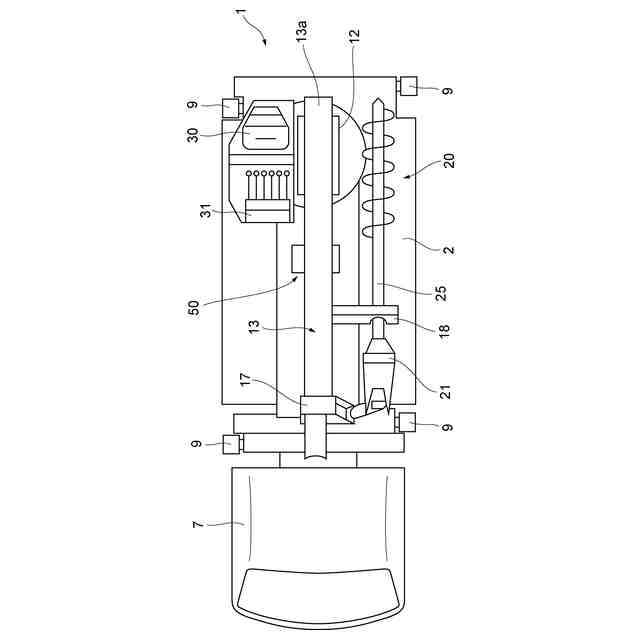
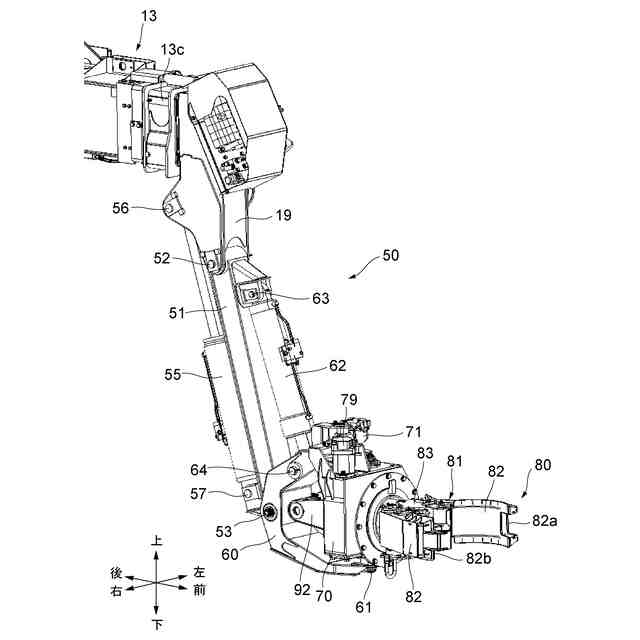
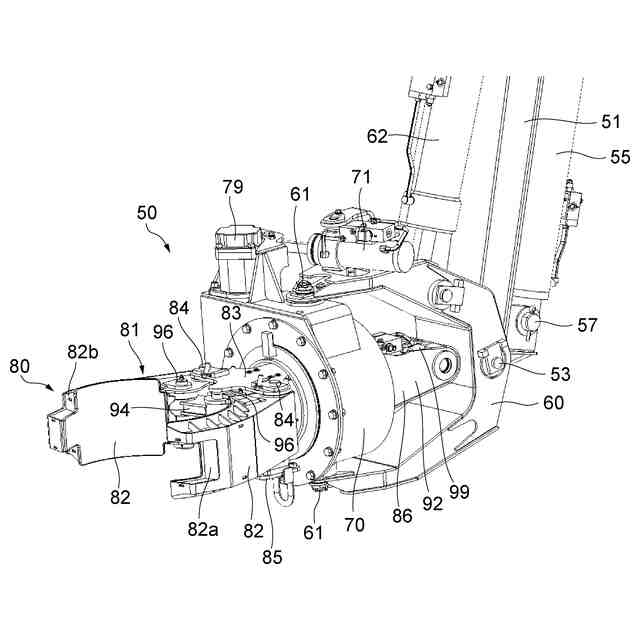
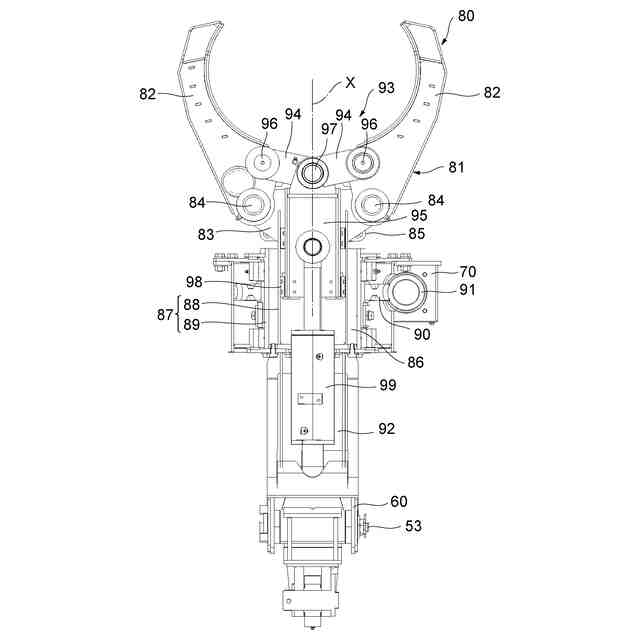
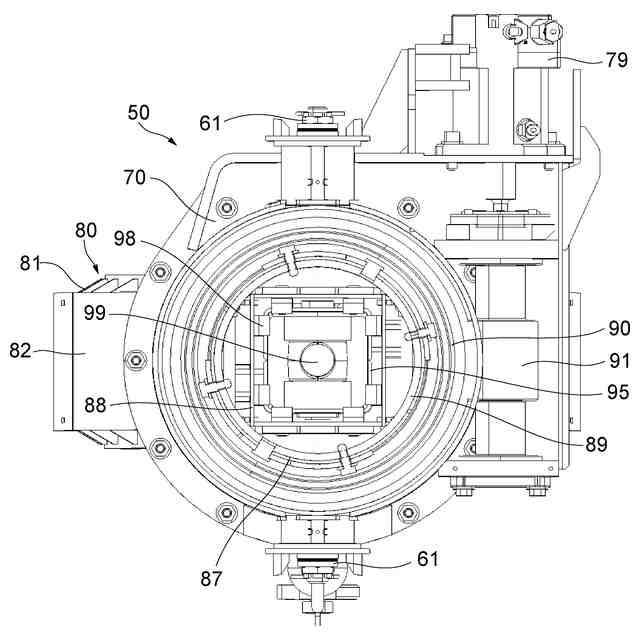
上記目的を達成するため、本発明に係る把持式作業車(例えば、実施形態の把持式穴掘建柱車1)は、車体と、前記車体上に旋回動、起伏動および伸縮動可能に設けられたブーム(例えば、実施形態のブーム13)と、把持対象物を把持することが可能な把持部(例えば、実施形態のグリッパ80、把持部81)と、前記ブームの先端部と前記把持部との間に設けられて前記ブームの先端部に対する前記把持部の姿勢を変化させる支持機構(例えば、実施形態のアーム51、第1ジョイント部材60、第2ジョイント部材70)と、を備えて構成される。この把持式作業車は、前記ブームおよび前記支持機構を作動させる複数のアクチュエータ(例えば、実施形態の旋回モータ14、伸縮シリンダ15、起伏シリンダ16、アームシリンダ55、縦首振りシリンダ62、横首振りシリンダ71、グリッパモータ79)と、前記ブームの起伏角を検出するブーム起伏角度検出器(例えば、実施形態のブーム起伏角度検出器120)および前記ブームの伸縮長さを検出するブーム伸長量検出器(例えば、実施形態のブーム伸長量検出器121)と、操作に応じて前記把持部を水平もしくは垂直移動させるための移動指令を出力する操作装置(例えば、実施形態のブーム旋回起伏操作レバー32a、ブーム伸縮屈伸操作レバー32b)と、前記操作装置からの前記移動指令に基づいて前記把持部を水平もしくは垂直移動させるためのモードとして移動速度指令モードおよび移動精度向上モードを選択設定可能なモード設定装置(例えば、実施形態のモード選択スイッチ33)と、前記モード設定装置により前記移動速
度指令モードが設定されたときには、前記操作装置からの前記移動指令に基づいて前記移動速度指令モードの下で前記把持部を水平もしくは垂直移動させ、前記モード設定装置により前記移動精度向上モードが設定されたときには、前記操作装置からの前記移動指令に基づいて前記移動精度向上モードの下で前記把持部を水平もしくは垂直移動させる制御を行う制御装置と、を備える。そして、前記移動速度指令モードにおいて、前記制御装置により前記把持部を水平もしくは垂直移動させる制御は、前記操作装置からの前記移動指令に対応して求められる前記把持部の目標水平移動方向および目標水平移動速度または目標垂直移動方向および目標垂直移動速度を前記ブームの起伏動および伸縮動の作動に分解して目標起伏方向及び目標起伏速度並びに目標伸縮方向および目標伸縮速度を求め、前記目標起伏方向及び前記目標起伏速度で前記ブームを起伏動させる制御および前記目標伸縮方向および前記目標伸縮速度で前記ブームを伸縮動させる制御を組み合わせて行いながら、前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、このように位置を求めた前記把持部が、前記目標水平移動方向または前記目標垂直移動方向に向かって前記目標水平移動速度または前記目標垂直移動速度で移動するように前記ブームの目標起伏速度および目標伸縮速度を補正しながら制御するように構成され、前記移動精度向上モードにおいて、前記制御装置により前記把持部を垂直移動させる制御は、前記操作装置からの垂直移動指令に基づいて、前記操作装置の操作に応じて前記ブームを起伏動させる制御を行うとともに、このようにして前記ブームが起伏動するのに応じて前記把持部が垂直移動するように前記ブームを伸縮動させる制御を合わせて行い、前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、このように位置を求めた前記把持部が垂直移動するように前記ブームの目標伸縮速度を補正する制御を行う。
【0010】
前記把持式作業車において、好ましくは、前記制御装置は、前記移動精度向上モードにおいて、前記把持部を水平移動させる制御も行うように構成され、前記水平移動させる制御は、前記操作装置からの水平移動指令に基づいて、前記ブームを伸縮動させる制御を行うとともに、このようにして前記ブームが伸縮動するのに応じて前記把持部が水平移動するように前記ブームを起伏動させる制御を合わせて行い、前記ブーム起伏角度検出器および前記ブーム伸長量検出器による検出値から前記把持部の位置を求め、このように位置を求めた前記把持部が水平移動するように前記ブームの目標起伏速度を補正する制御を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る


 特許ウォッチ
特許ウォッチ